摘 要 伴随着信息技术的快速发展,计算机和机器人等都被赋予了视觉的功能,希望计算机能够通过双目视觉来观察世界。这就是建立在人类视觉系统研究的基础上,使得计算机通过二维图像来认知三维的世界。而且与人工视觉相比,计算机在双目视觉技术下,能够更快速、准确和数字化的识别世界。而计算机对图像的预处理又决定了其质量,因此对双目视觉图像匹配领域的现有算法进行优化,能够在保证图像匹配精度的前提下,尽可能提升系统效率。
关键词 双目视觉;图像处理;图像匹配
中图分类号 TP3 文献标识码 A 文章编号 1674-6708(2017)182-0084-02
视觉模型及算法的基础是利用两张存在视差的二维图形,构造一个具有更深度信息的立体图形。双目视觉系统则是利用两个摄像机来模拟人的双眼,对场景进行识别和测量,然后通过一定的计算方法将场景结果(图像)进一步处理,就可以获得一个三维的图像。因此双目视觉系统在各行各业都得到了广泛的应用,例如医学检查、制造业和军工制造等领域,也成为目前研究的热点。
1 双目视觉系统图像处理原理与现状
1.1 图像处理原理与流程介绍
双目视觉具有使用成本低、利用方便、效率较高的有点,因此被广泛应用于诸多领域。计算机视觉系统主要有图像获取、图像处理和分析、输出和显示3个步骤组成的,细化之后,可以将之分为以下几个步骤。
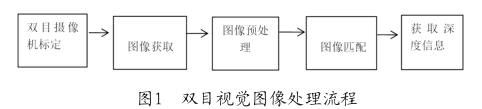
双目摄像机标定是根据有效的摄像机成像模型,通过实验和计算来确定摄像机的内外参数,进而能够正确建立物体表面点的集合位置,以及对应投影点坐标之间的关系。这是计算机双目视觉系统不可缺少的关键步骤。
图像获取是双目视觉系统的信息来源,摄像机在拍摄到场景后,转化为数字信号然后生成二维图形。进而在此基础上形成三维图形。但是光线条件、摄像机的性能等对所获取图像的品质影响较大。
图像处理技术将输入的图像经过处理算法,对原始数据进行预处理操作,降低无用信息和其他信息的干扰,从而达到提高图像质量,使图像能够进行进一步的分析。
图像匹配的目的在于寻找同一场景在左右像平面上的投影点,获取位置关系并得到视差,这是双目视觉系统中最为重要的一步。
获取深度信息是在图像匹配并得到视差后,可以根据三角测量方法计算目标物体的深度信息,从而获得物体表面点的三维坐标。
在整个流程中,图像的匹配工作是双目视觉领域最为基础的问题,也是为后续的图像分析和理解奠定基础的工作。但是由于双目摄像机在不同的场景、不同的角度和位置拍摄,以及受到光线条件的影响,每一幅图像存在较大的差异。例如灰度水平、场景位置、分辨率等等。而图像匹配就是寻找这些因素具有不变性的特征,进而根据这些特征来对两幅图像进行匹配。
1.2 影响图像匹配的因素分析
在双目摄像机在获取图像时,由于摄像器材、光线充足、拍摄角度的不同,都会让图像产生一定的畸变,这些畸变导致的误差会在进行图像匹配时被放大,进而导致匹配结果错误的发生。首先是平移、旋转等几何变化时,会导致两幅图像的所有像素都产生位移,对图像的匹配产生较大的影响。而旋转则是由于摄像设备的视角差异,两幅图的相对关系发生旋转。其次是光线条件,在对同一场景进行拍摄时,由于光线条件的差异也会导致图像存在差异。例如在光线较强时,图像的平均灰度高,会产生阴影。而在光线不足的情况下,所获取的图片分辨率就会降低,带来部分遮挡现象,这些差异给图像匹配带来很大的难度。第三种是传感器的噪声产生的影响。传感器是将获取的信息转换成电信号,因此在获取图像时、电磁辐射、传感器件、开关器件等都會产生一定的成像噪声。系统就会对信号进行离散化并编码,以便进行计算机处理,但是在这个过程中就会出现量化误差,给图像匹配造成影响。
1.3 图像匹配算法的研究现状
在国内外专家学者的研究中,是针对不同的应用目的为出发点,提出了许多具有针对性的匹配算法,具体来说可以分为基于图像灰度和基于图像特征两个类别。两种算法对比来看,基于灰度的匹配算法,是对图像的平均灰度水平、灰度直方图、平均绝对值以及平方差、协方差等进行统计,根据这些特点进行匹配具有精度高的优势。但是也存在计算量大、时间效率不高的问题,因此并不能满足现实生活的需求。而基于特征的图像匹配方法,在是针对图像中包含各种特征的信息进行提取,数据量相对较小,因此匹配效率更高,能够满足时时图像处理的需要。具体来说,基于灰度的图像匹配算法,是通过对图像的灰度信息进行分析,计算图像之间的相似度,进而寻找图像的最佳匹配。也就是说该方法所选取的特征即是图像的灰度。可见该方法思路十分简单,有利于在双目视觉中实现。但由于计算量较大,因此许多研究者提出了快速算法。例如FFT、SSDA等计算方法。而基于特征的图像匹配算法,则是通过对两幅图像的特征和内容进行对比,对特征进行参数描述,然后根据计算得出的相似度进行匹配,完成图像匹配。优势在于该方法的计算过程不会因为几何位置、光线强度等因素的差异而影响匹配结果,数据量较小,极大地提高了计算效率。
2 双目视觉图像处理算法的优化
图像的特征,主要包括轮廓特征和区域特征,轮廓特征是指场景或物体的外部边界,而区域特征则是图像某一区域中所独有的属性。从内容上看,图像的特征包括形状、空间、颜色和纹理等;从结构看,图像特征又可以分为点、线、面。因此优化特征图像匹配算法,就要用以下几个方面衡量,一是图像特点的检测和提取是否快捷;二是图像特征描述向量维树是否适合;三是特征点数是否适合。
在本文的研究中,主要采用了SURF特征图像匹配算法。提取图像特征的具体步骤如下。
第一步是特征点检验。利用Hessian矩阵的行列式的值的正负来判断该点是否为极值点,此过程中采用方框滤波替代二阶高斯滤波来减少构建尺度空间的计算量,并引入积分图像来加速图像卷积的计算;
第二步是特征点的精确定位。根据检测所得到的极点值与周围的26个像素点进行比较,进而确定特征点,比周围26个像素的值都大或者都小的即是特征点。
第三步是生成特征描述向量,通过计算得出特征点处圆形领域内的Haar小波响应,然后划出扇形模板,并计算扇形范围的内的Haar小波响应,根据这些特征点来构建特征描述向量。
最后采用SURF特征算法提取,其函数原型如下。
cvExtractSURF(image,0,&Keypoints,&Descriptors,storage,params);?
其中image为图像,Keypoints和Descrip tors是两个队列,用来保存图像的关键点位置信息和特征点的描述向量,storage?为图像进行特征提取时开辟的暂存区域,params为SURF参数。
3 结论
在本文的研究中,对图像匹配算法的两类常用方法进行了分析,可见目前特征点提取算法更加适合现代社会的需要,计算量小而且效率高。同时在图像进行平移、选择等因素的影响后,具有不变性的特点,这也提高了图像匹配的鲁棒性。在基于SURF特征算法下,提高了图像计算和匹配效率,更加适合双目视觉系统的需要。
参考文献
[1]郝捧华,龚国庆,陈勇.双目视觉图像处理算法的优化[J].北京信息科技大学学报,2012(5):64-67.
[2]戴玉艳.一种基于图像处理的双目视觉校准方法[J].电子设计工程,2015(16):178-181.
[3]杨阳.基于双目感知的立体视觉集成[J].现代计算机,2016(5):63-66.
[4]张晓会,张凤生,王立伟.双目视觉法测量接触线几何参数的图像处理方法研究[J].青岛大学学报:自然科学版,2016(2):80-85.
- 猪支原体肺炎的流行病学调查及血清学检测
- 大别山黑山羊饲喂自制配方颗粒饲料试验报告
- 猪胞内劳森氏菌lscN基因的克隆及序列分析
- 畜禽养殖环境金黄色葡萄球菌耐药性及毒力因子分析
- 猪乙型脑炎(HW1株)细胞灭活疫苗免疫抗体水平分析
- 规模化猪场后备母猪的饲养管理探讨
- 春季预防禽流感的饲养管理要点
- 日粮纤维对育肥猪消化道生理功能的影响
- 湖北地区山羊越夏三要素
- 动物免疫失败的原因分析与对策探讨
- 规模猪场疾病的预防与控制
- 猪弓形虫病的防治措施
- 畜牧养殖中疾病产生的原因分析及其防制措施
- 一例羊蠕形螨病的诊治及体会
- 围产期奶牛生产疾病的研究进展
- 发热黄疸型牛病的临床鉴别与治疗
- 开江县布鲁氏杆菌病发生现状及净化措施
- 规模化养殖场猪蓝耳病净化技术研究
- 湖北省水禽产业发展现状与思考
- 规模养殖场档案管理中存在的问题及改进建议
- 畜禽养殖废水处理存在的问题及处理技术
- 基层动物防疫工作现状与策略
- 基层动物产地检疫工作存在的问题与对策探讨
- 动物检验检疫在保障食品安全中的作用
- 遵义地区O型口蹄疫免疫抗体血清学调查与分析
- untouristed
- untouristy
- untoward
- untowardly
- untowardness
- untowardnesses
- untoxic
- untoxically
- untrackable
- untradable
- untradeable
- untraded
- untrading
- untraditionally
- untrafficked
- untragic
- untragical
- untragically
- untragicalness
- untragicalnesses
- untrailed
- untrailing
- untrainable
- untrained
- untrainedly
- 燕尔新婚
- 燕尘
- 燕尾
- 燕尾服
- 燕尾草
- 燕尾香
- 燕居
- 燕居深念
- 燕山
- 燕山五桂
- 燕山铭
- 燕岱之石
- 燕巢
- 燕巢于幕
- 燕巢危幕
- 燕巢幕
- 燕巢幕上
- 燕巢飞幕
- 燕市
- 燕市悲歌
- 燕市酒徒
- 燕席
- 燕幕
- 燕庐
- 燕弓