展猛 王社良 赵云


摘要:基于压电陶瓷驱动器的工作原理以及形状记忆合金(shape memory alloy,SMA)丝的力学性能特点,研发一种SMA压电混合减震装置,对其进行电一力学试验,并在试验数据的基础上建立以速率符号、电压和位移为神经元输入的混合装置BP网络预测模型。最后将其安装到一个相似比1:2的10kV干式空心电抗器结构模型中,其中压电驱动器的激励电压采用T-S模糊逻辑输出,对其进行无控、被动控制和混合控制时的模拟地震振动台试验和数值模拟,进而分析模型结构的动力特性变化规律和不同地震波时的地震响应抑制效果。结果表明:文中研制的SMA-压电摩擦混合减震装置性能稳定、构造合理,可以有效地降低电抗器结构的动力反应。一般地,被动控制时位移和加速度的减震率可达40%,混合控制时可达50%,且震后未见电抗器结构薄弱部位发生地震破坏,说明智能材料减震系统提高了电抗器结构的抗震可靠性,为电气设备系统的减震控制保护提供了新途径。另外,试验与数值模拟结果吻合较好,表明BP神经网络可以较好地跟踪压电SMA混合减震装置的输出力。
关键词:减震;振动台试验;压电陶瓷;形状记忆合金;电抗器
中图分类号:TU317+.1;TM47 文献标志码:A 文章编号:1004-4523(2020)01-0179-09
DOI:10.16385/j.cnki.issn.1004-4523.2020.01.020
1概述
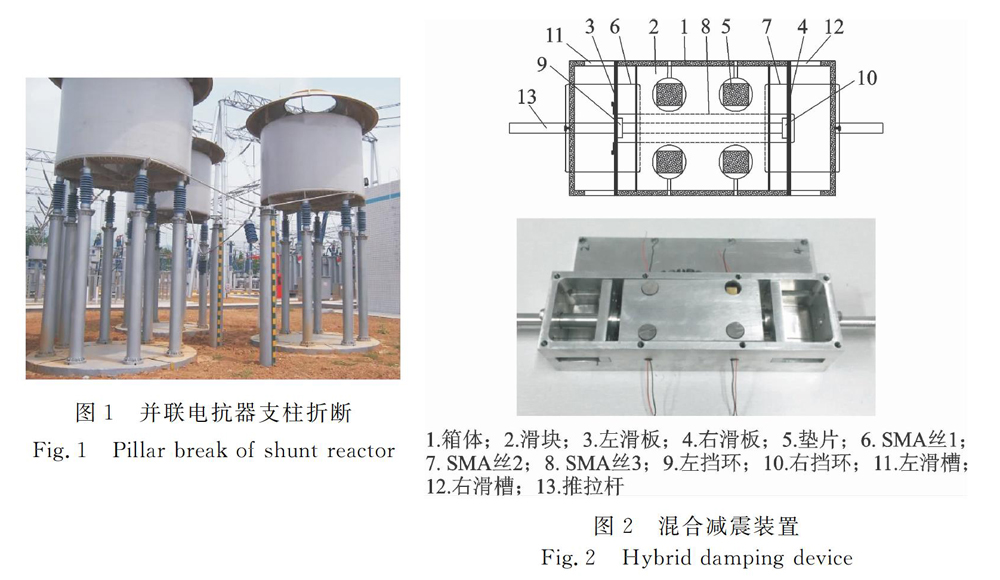
空心电抗器作为电力运输设备中的一员,由于自身重心高、长细比大,头部质量大等结构特点,非常不利于抗震,常发生支柱绝缘子与电抗器组件被震坏的现象,如图1所示。而随着中国电网容量的大幅度增加以及电压等级的不断提高,电抗器设备的电压等级及容量也不断提升,使得设备整体高度大幅度增高,更易带来抗震强度方面的安全隐患。近些年,电抗器设备的抗震性能研究已经受到了一些学者的重视,但主要是利用有限元软件对其抗震性能进行分析,或从材料性能、加固措施等方面来提高电抗器设备的抗震能力。罗孟杰等对相问采用陶瓷柱和铝柱硬连接的叠装式空心电抗器的抗震强度进行了理论计算与试验模态分析,并编制了用于叠装式空心电抗器的电算程序。侯春明对干式空心电抗器总称结构进行了地震分析,提出了计算依据与数学模型,给出了基本自振周期、地震力以及安全校核的实用计算公式。曹国旭等采用有限元分析法,分析了静力作用下±800kV干式平波电抗器支柱式绝缘子支撑结构的内力与变形,并对结构进行了抗震性能评估。王黎明等利用ANsYs软件建立了以3D梁单元为主的特高压直流平波电抗器支撑结构模型,并通过反应谱法求得了混合支柱绝缘子的抗震响应。刘媛等应用ANSYS软件对66kV干式空心并联电抗器进行了三维有限元建模,在运用Block Lanczos法对电抗器结构进行模态分析的基础上,采用振型分解法对电抗器结构进行了地震响应分析,结果表明:地震动作用下电抗器的垂直位移要比水平位移小一个数量级,支架部分特别是绝缘子部分,其许用应力较低,是结构抗震强度验算的关键。范书立等对特高压输变电线路的电抗器抗震性能进行了振动台动力模型试验,研究了不同地震激励下电抗器的动力特性及抗震能力,得到了电抗器关键部位在地震作用下的加速度、位移和应变反应及抗震薄弱部位,试验结果表明,加速度响应在各层均有不同程度的放大,支柱绝缘子的根部和顶部是电抗器的抗震薄弱部位,竖向地震动对电抗器的动位移、加速度影响很小,对动应变影响较大。目前关于电抗器的减震分析和试验研究还较少,因此引人振动控制技术,对电抗器设备进行减震控制试验研究具有重要的理论意义和工程价值。
形状记忆合金和压电陶瓷是工程结构减震控制常用的智能材料,国内外对两者单独减震的相关研究和工程应用已经很多,但利用SMA压电混合装置进行减震控制的研究还较少。戴纳新利用SMA压电混合摩擦阻尼器进行了钢框架模型的隔震分析;Ozbulut等研究了SMA压电混合装置对-20层非线性Benchmark模型的地震响应控制效果;王社良等基于改进的遗传算法,以多模态控制性能指标作为优化准则,利用设计的SMA-压电摩擦混合阻尼器对一空问杆系结构进行了优化控制分析。本文基于压电陶瓷驱动器的基本原理以及SMA丝的力学性能特点,研发了一种SMA压电混合减震装置,对其进行电一力学试验,并在试验数据的基础上建立以速率符号、电压和位移为神经元输入的混合装置BP网络预测模型。最后将其安装到相似比1:2的10kV干式空心电抗器结构模型中,其中压电驱动器的激励电压采用T-S模糊逻辑输出,对其进行无控、被动控制和混合控制时的模拟地震振动台试验和数值模拟,进而分析模型结构的动力特性变化规律和不同地震波时的地震响应抑制效果,验证研发的SMA-压电摩擦混合减震装置的有效性,并探讨对电抗器设备进行智能减震的可行性。
2SMA压电混合减震装置性能试验
本文减震试验所采用的混合减震装置如图2所示,主要由箱体、滑块、滑板、滑槽、推拉杆、挡环、SMA丝和压电驱动器组成。当推拉杆向左运动时,左挡环推着左挡板在向左移动,SMA丝3受拉耗能;当右挡环运动至滑块右端时,滑块和左挡板开始一起向左运动,此时SMA丝2、SMA丝3和压电陶瓷驱动器同时耗能。当推拉杆向右运动时,右挡环顶住右挡板向右侧运动,SMA丝3受拉耗能;当左挡环运动至滑块左端时,滑块和右挡板开始一起向右运动,此时SMA丝1、SMA丝3和压电陶瓷驱动器同时耗能。该混合装置的SMA单元和压电单元依次工作,小震时SMA单独工作;大震时,SMA先工作,而后SMA和压电摩擦单元同时工作,且能实时调节控制力。
本次试验所用形状记忆合金丝化学成分为Ti-51%atNi,相变温度如下:Mr为-42℃,Ms为-38℃,As为-6°C,Af为-2℃,因此该丝在常温状态下处于奥氏体状态。在混合减震装置试验之前,首先对奥氏体SMA丝进行力学试验,以确保SMA丝的性能满足复合装置的耗能要求,鉴于目前单纯SMA丝试验研究较多,这里就不再赘述,仅给出混合装置的电力学试验。其中,SMA丝直径0.7mm,最大应变幅值7%;SMA丝3数量为2根,长度175mm,单独工作位移5mm;SMA丝1和2为4根,长度100mm。矩形压电陶瓷驱动器尺寸为10mm×10mm×36mm,电压范围0-150V,最大伸长量40um,理论最大出力3600N。初始摩擦力为200N。試验设备采用台湾弘达HT9711动静材料试验机。如图3所示,试验时采用位移控制,三角波加卸载,试验中测量了位移幅值5,9,12mm,频率0.05,0.1,0.2,0.3Hz,电压O,40,80,120V时三角波激励下控制力与位移的关系。限于篇幅,这里仅给出部分试验结果。图4给出了无激励电压和120V电压时不同频率下的控制力一位移曲线,可以看出,滞回曲线饱满对称,阻尼器性能稳定,受频率的影响较小。图5给出了0.1Hz下不同电压时的控制力一位移曲线,可以看出,随着电压的增大,阻尼器的最大控制力逐渐提高,滞回环面积不断增大,耗能能力逐渐增强。
3振动台试验
3.1试验模型
空心电抗器实体一般呈圆柱状,由多层线圈组成,质量分布均匀,顶部留有用于连接上层电抗器实体的上星形钢架,底部留有用于连接支柱绝缘子的下星形钢架。支柱绝缘子一般由绝缘子和支撑组成,端部一般固定于混凝土底盘上,当有防震要求时,也可采用预埋底脚螺栓安装。常用的支柱绝缘子类型主要有瓷瓶绝缘子、玻璃钢绝缘子和混合绝缘子,由于电抗器结构的连接件需采用无磁性材料,支撑一般采用铝柱支撑结构。根据电抗器的结构特点和使用要求,选择10kV高式空心电抗器作为研究对象,其额定电抗率为6%,电容容量为2700kVar,安装直径为750mm,相问距离为315mm,支点个数为4个。同时设计制作了其相似比为1:2的结构模型,电抗器模型实体采用4层3mm的铁皮围成的圆柱体来模拟,外径为50cm,高为30cm,质量为40kg;支柱绝缘子为4根,采用环氧树脂玻璃纤维增强混合绝缘子,高为4cm,铝柱支撑高为56cm,直径18mm,壁厚1mm。限于振动台质量限制条件,不再布置底盘,直接将铝柱端部固定于台面。
电抗器模型的振动控制主要是降低电抗器实体的加速度反应,减小地震力,防止绝缘子连接部位剪切破坏。减震装置一般可在两支柱绝缘子之问采用斜撑阻尼/作动杆件的方式进行安装,其中减震杆件的一端与支柱绝缘子顶部相连的上星形架固定,另一端与另一支柱绝缘子的根部固定,这样便可利用减震杆件的分力控制多维地震波作用。为便于安装,文中的试验模型采用支架平台布置方式安装减震装置,将减震装置固定在一支架平台上,同时推拉杆与电抗器设备的下星形架相连接,只要支架的侧向刚度大于支柱绝缘子的侧向刚度,减震装置即可有效地控制电抗器结构的地震响应。限于台面尺寸,这里使推拉杆与圆柱体铁皮下焊接的固定杆进行螺栓连接,如图6所示。
3.2试验装置及设备
根据本次减震试验的特点,西安建筑科技大学实验室自主研发了其仿真控制系统。试验结果表明,该仿真控制系统可以根据结构动力响应实时调整减震装置的控制力大小,较好地实现了压电摩擦单元的半主动控制,抑振效果明显。试验用到的仪器还有:EM1712S直流稳压电源、大功率稳压驱动电源、891型位移拾振器、941B型速度拾振器、PCB加速度传感器、GF-300B型功率放大器、INV306S型智能信号数据采集仪、计算机动测信号分析系统等。部分仪器和设备如图7所示。
3.3传感器布置及试验工况
3.3.1传感器布置
振动台台面上分别布置速度传感器、位移传感器和加速度传感器各一个,如图8(a)所示,并且对速度传感器采集到的信号进行微分得到加速度反应,然后与另一个加速度传感器采集到的信号进行对比,以验证微分的准确性。模型结构底部的星形架上分别布置一个速度传感器和一个位移传感器,如图8(b)所示,且将速度传感器采集到的信号作为仿真控制系统的输入来调节减震装置的控制力,加速度反应由速度反應微分得到。
3.3.2试验工况
本次试验原结构设计为8度设防,二类场地土。依据《建筑抗震设计规范》(GB50011-2010)表5.1.4-2,特征周期Tg=0.35s。根据设计的假定场地条件及其动力特性,选取两条天然波(E1Centro波和江油波)和一条人工波(上海波)作为试验时的输入地震激励。上海波为《上海市建筑抗震设计规程》推荐的人工拟合的地震波,原场地类别Ⅳ类,经Seis-moSignal软件转化为Ⅱ类场地类别,其时程曲线如图9所示,其持时为20s,间隔0.02s。
试验时,首先采用50gal白噪声对结构进行扫频,测得其自振频率。然后输人不同地震波,加速度峰值分别调幅为600gal,进行无控、被动控制和混合控制时的振动台试验,测量不同工况下结构的动力响应,并进行对比分析。限于试验条件,这里仅进行单向地震波激励下的振动台试验。
3.4控制流程
整个实验控制系统由模型结构、SMA压电混合减震装置、加速度传感器、A/D转换器、控制器、D/A转换器和压电陶瓷驱动稳压电源组成,由T-S型模糊控制器确定施加电压值的大小。其中,A/D转换器、控制器、D/A转换器这三部分由dSPACE实时仿真系统来完成。其过程为:通过振动台产生地震动激励,由布置在结构上的传感器测量结构的速度反应,然后转化为数字信号作为控制器的输入,此时通过编译好的控制算法计算出电压值,利用驱动电源对压电陶瓷驱动器施加电压,从而实时改变SMA压电混合减震装置的输出力来控制结构的反应。
3.5试验结果与分析
3.5.1动力特性分析
将白噪声扫频得到的加速度信号,通过离散傅里叶(FFT)变换到频域,即可得到无控结构和有控结构的传递函数,如图10所示。由传递函数可得到结构的自振频率,并由半功率带宽法可求得其阻尼比。电抗器模型的结构参数如表1所示。可以看出,安装SMA-压电摩擦混合减震装置后,由于SMA丝的作用,结构的频率和刚度略有增大,而阻尼比则增加两倍,抗震能力显著提高。
3.5.2动力反应分析
表2给出了不同地震波激励下电抗器结构无控、被动控制和混合控制时的相对位移反应峰值和相对加速度反应峰值。可以看出,E1Centro波和上海波激励时,层位移和层加速度被动控制的减震率都约为40%,混合控制减震率约为50%;江油波相对能量较大,减震效果也相对更好。被动控制时,位移减震率为55.72%,加速度减震率为39.41%,混合控制时,两者都约为60%。相对被动控制,混合控制减震率可提高约10%,虽增加了能量输入和控制算法,但电力设备的安全运行直接关乎着人民的经济生活和国家的生产建设,因此混合控制技术的应用仍是值得的。同时还可以看出,不同地震激励时的被动控制的动力反应和混合控制动力反应相差都不是很大,而减震率的不同主要体现在无控反应上,这主要是因为结构模型质量较小,相应的地震力也较小,而SMA丝1或SMA丝2和压电摩阻力介人后,其动力反应很难再增加,同时也问接地说明了小震时,SMA丝3即可积极消耗地震能量,减小地震反应。
图11-13给出了不同地震激励时结构无控、被动控制和混合控制时的动力反应时程对比曲线。可以看出,由于压电摩擦耗能单元的介入,混合控制时的减震效果优于被动控制。图14给出了三种地震动激励下混合控制时的电压时程曲线。可以看出,压电摩擦单元的阻尼力可以根据结构的动力反应实时调整,并与SMA丝被动耗能单元结合,实现电抗器结构模型的混合半主动控制。
3.5.3试验结果与数值模拟对比
BP网络预测模型可综合考虑多种因素,较好地跟踪复杂因素下减震装置的输出力,且便于在MATLAB仿真中实现,为此,文中基于课题组前期的研究,建立了以速率符号、电压和位移为神经元输人的混合装置BP网络预测模型,网络结构如图15所示。同时以T-S模糊逻辑来判断电压值的大小,因此,对于具有n个自由度的剪切型结构模型,在其结构上安装p个减震装置,当受到一维地震作
4结论
研发了一种新型SMA压电混合减震装置,进行了相应的电一力学试验。设计制作了一个相似比1:2的10kV干式空心电抗器模型,对其进行了无控、被动控制和混合控制时的模拟地震振动台试验和数值模拟,分析了El Centro波、江油波和上海波时的结构动力反应及其减震效果。主要结论如下:
(1)混合减震装置的SMA和压电单元依次工作,当小震时SMA单独工作,当大震时,SMA先工作,而后SMA和压电单元同时工作,是一种构造合理,性能稳定,耗能能力好的减震装置。
(2)在被动控制的基础上,SMA-压电混合减震装置可以根据结构的动力反应实时改变压电单元阻尼力的大小,进一步降低电抗器模型结构的地震响应。一般地,被动控制时,位移和加速度减震率可达40%,混合控制可达50%,且震后未见电抗器结构薄弱部位发生地震破坏,说明智能材料减震系统提高了电抗器结构的抗震可靠性,为电气设备系统的减震控制保护提供了新途径。
(3)基于减震装置的试验数据,以速率符号、电压和位移为神经元输人的BP网络对减震装置的输出力进行跟踪,利用T-S模糊逻辑来调整压电单元激励电压的大小,建立了电抗器结构SMA-压电混合减震控制仿真模型,结果表明,仿真结果与试验结果吻合较好,表明BP神经网络可以较好地跟踪压电SMA混合减震装置的输出力。
- “互联网+”下苏州物流集聚区智慧物流发展对策研究
- 快递包装的碳效应分析
- 大学生素质教育拓展工程的探索与实践
- 基于平衡计分卡的高校教学质量评价体系研究
- “互联网+”背景下高校会计信息化存在的问题及对策研究
- 高等职业教育“工匠精神”的培育路径研究
- 新时代高校协同创新研究
- 会计专业对接班课程构建模式分析
- 高校创新创业教育的跨学科平台运行机制研究
- 高职院校会计专业群建设的思考
- 基于微课与网络教学平台的翻转课堂教学改革研究与实践
- 黑龙江省中小型民营企业人才发展战略研究
- 打造黑龙江省特色跨境电子商务路径研究
- 乡村振兴战略下黑龙江省乡村人才建设的问题及对策
- 从“哈洽会”看黑龙江省品牌展会建设
- 刍议黑龙江省烟草产业增长途径问题
- 黑龙江省绿色创新效率的提升路径研究
- 基于DEA模型的区域环保投入相对效率研究
- 网联模式下第三方支付平台业务会计处理探究
- 开展部门月度绩效考核存在的问题与对策研究
- 社交网络在高校人才招聘中的应用研究
- 互惠式学习模式:中小企业破除嵌入悖论的新路径
- 旅游电商网站评价体系构建及实例分析
- 廊坊市创新型城市指数比较分析研究
- 粤港澳大湾区背景下广州国际灯光节的协作与发展
- belittlement
- belittlements
- belittler
- belittlers
- belittles
- belittling
- belittlingly
- be lit up
- (be, live) on easy street
- be living in the past
- bell
- bell bottoms
- bell-bottoms
- bell curve
- bellcurve
- belled
- bell-hop
- bellhop
- bellhopped
- bell-hopped
- bell-hopping
- bellhopping
- bellhops
- bell-hops
- bellied
- 鰅
- 鰅鱅
- 鰅鳙
- 鰆
- 鰈
- 鰉
- 鰊
- 鰋
- 鰌
- 鰌海
- 鰍
- 鰏
- 鰐
- 鰒
- 鰓
- 鰕
- 鰕公
- 鰕槎
- 鰕魁
- 鰗
- 鰗鮧
- 鰛
- 鰜
- 鰝
- 鰟