
摘 要:结合自动测试系统测试效率高、可以缩短测试工作时间等优点,在原有位标器性能测试系统基础上,提出了构造位标器速度环自动测试系统的技术方案,并对该方案进行了实验验证。结果表明,该方案可行、有效,能够大大提高工作效率。
关键词:位标器;Visual C++;自动测试系统
中图分类号:TP303
文献标识码:A 文章编号:1672-7800(2015)005-0039-02
作者简介:王乐(1986-),女,河北南皮人,硕士,西安电子工程研究所总体四部线路设计师,研究方向为信号与处理;魏政(1986-),男,陕西西安人,硕士,西安电子工程研究所总体四部线路设计师,研究方向为信号与处理。
0 引言
位标器是保证导引头精确制导的关键部件之一,具备角位置预定、空间稳定、目标角度跟踪、空间角扫描等功能,其在结构和控制等方面的性能将直接影响到导引头系统的整体性能[1]。位标器在交付使用之前,需要对其性能进行测试,以确保在导引头上能够正常使用。以往的人工测试非常繁琐耗时,导致测试效率低下,而自动测试系统可以较好地执行繁琐的测试任务,减少测试人员的手动测试工作量,保证测试进度。所以,考虑设计一种位标器自动测试系统,以达到节约时间、提高工作效率的目的。
1 速度环自动测试系统设计
1.1 设计要求
位标器速度环自动测试系统是检验评定位标器各项技术参数的重要设备,该系统通过对被测对象的信号进行数据采集、记录,使测试人员能够对采集的数据进行分析计算[2],并生成测试报告完成对被测对象的性能及技术参数的综合性检测,以判断位标器的工作状态是否符合指标要求。
1.2 系统功能
本自动测试系统用于位标器速度环的主要性能测试,包括:①动态响应时间;②视线角速度范围及精度;③框架角范围及精度;④最大搜索角速度。
1.3 系统硬件结构
位标器与导引头电子舱相连,通过计算机控制界面调用自动测试程序,经MOXA卡与信号处理板上的DSP通信,使位标器执行置位、跟踪、断电等工作状态。电源为导引头供电。
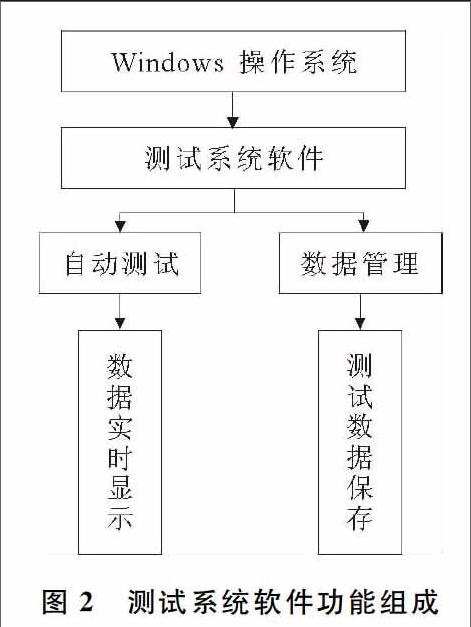
1.4 系统软件组成
自动测试系统软件组成框图如图2所示。软件功能包括:自动测试以及数据管理。测试系统在Windows环境下运行,使用Visual C++开发。Visual C++可胜任高级的用户界面程序设计和复杂的Windows应用程序编程工作,可以实现高效的串口通信和复杂的数据处理算法,并对采集的数据进行各种处理、分析、存储、显示[3]。
(1)自动测试软件。自动测试软件包括数据采集存储与实时显示。在自动测试流程中,系统能够实时显示被测对象的方位/俯仰视线角速度、方位/俯仰框架角等关键信息[4]。
(2)数据管理。通过数据管理,系统可将测试数据自动保存到指定路径[5],测试人员可查询所有的测试数据,并使用Origin软件绘制图像。
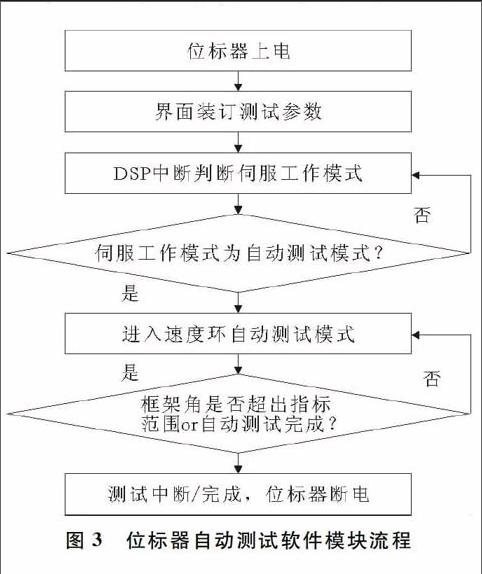
1.5 软件测试流程
位标器自动测试系统以界面控制的形式完成速度环自动测试所需要的全部功能,同时实现测试系统的数据采集,操作简单、方便、可视化。软件测试模块流程如图3所示。
2 测试方法
整体测试步骤如下:① 打开DSP测试程序及任务机控制界面,连接所有测试设备及线缆;②被测导引头上电,任务机界面打开串口,参数装订界面中编号填2(置零位)并确定;③位标器上电,进入置位模式;④参数装订界面输入编号9(自动测试模式)并确定,开始记录界面数据;⑤DSP中断5判断伺服工作模式为9(自动测试模式),直接进入速度环自动测试模式;⑥按测试步骤0~11的顺序依次完成视线角速度范围及精度、框架角范围及精度、最大搜索角速度测试。
位标器自动测试系统测试步骤如图4所示。
其中,测试步骤0~7完成视线角速度范围及精度测试,首先令方位、俯仰框架角及角误差等置零位,即进入准备工作。步骤0设定方位扫描速度及扫描范围,根据正负扫描方向将速度值付给位标器方位前馈量,进行速度闭环,实时记录位标器输出数据和控制信息,同理完成步骤1~7的测试流程,达到一定时间,该项测试即结束。通过记录的状态字和视线角速度信息进行判断,如满足设定测试范围及精度要求,则认为视线角速度范围及精度满足技术要求。
框架角置零位保持,紧接着进入步骤8框架角范围及精度测试流程,置方位框架角,实时记录位标器输出数据和控制信息,接着按程序设定规律方位、俯仰顺序进行,完成所有方位,俯仰角度置位测试即结束。根据记录的角度信息,判断是否满足框架角范围及精度的指标要求。
框架角置零位保持,进入最大搜索角速度测试流程,步骤9设定方位扫描范围,步骤10设定俯仰扫描范围,实时记录位标器输出数据和控制信息,达到一定时间该项测试即结束,对记录的导引头框架角信号进行时间微分,其结果最大值即为测量的最大角速度值。
最后,方位、俯仰框架角置零位保持,自动测试完成,位标器掉电。
实际测试结果如图5(a)、(b)所示。
对比图4和图5(a)可以看出,实际测试步骤与设计预期相同,满足设计要求。
图5(b)是与图5(a)各测试步骤相对应的测试数据。可以看出,动态响应时间、视线角速度范围及精度、框架角范围及精度、最大搜索角速度测试数据均满足指标要求。
3 结语
位标器速度环自动测试系统经过实验验证,各项数据指标满足设计需求,系统运行稳定可靠。以往测试系统需要专业技术人员进行,而该系统的自动化程度较高,降低了对测试人员的专业技术要求,将测试人员从过去繁琐的工作中解脱出来,减轻了测试人员的劳动强度,提高了工作效率,并且能将测试数据保存在指定路径,便于工作人员对不同批次的产品性能进行对比。因此,自动测试系统的投入使用将为位标器检测提供重要的测试保障手段。
参考文献:
[1] 赵自文.位标器振动测试系统设计[J]. 计量与测试技术,2006(11):9-11.
[2] 杨晓东.雷达导引头位标器的滑模控制方法研究[D].西安:西安电子科技大学,2010.
[3] 王志生,苏建刚,黄艳俊.一种光电火控目标航路仿真新方法[J].火力与指挥控制,2010(11):83-86.
[4] 李烨,赵剡.基于虚拟仪器的位标器自动测试系统[J].航空兵器,2008(1):46-49.
[5] 刘阳. 导引头位标器的建模及参数辨识[D].哈尔滨:哈尔滨工业大学, 2012.
(责任编辑:黄 健)
- 电力企业调控运行流程优化管理分析
- 企业营销管理中管理会计方法的应用价值①
- "互联网+"背景下高职班级的信息化管理
- 浅析水利水电工程的施工技术
- 经济跨区域发展背景下城市外来人口就医选择影响因素的研究现状
- 工程机械的绿色设计与制造
- 调控一体化模式下电网运行资源的优化配置分析
- 浅析基于状态空间法的供热管网动态热力工况
- 一种新型智能扫地机器人的设计方案
- 对国企基层政工干部队伍建设的思考
- 5G下的远程异地评审系统的设计与实践
- 新时代广播电视技术维护工作特点及策略研究
- 变电运行中二次回路异常原因及处理措施
- 基于合作学习理论的高校毕业生就业创业指导
- 高职旅游管理专业实训条件建设探析
- 树立健康理念,从思想上重视健康文化在企业文化中的探索与应用
- 建筑工程概预算编制对工程造价的影响分析
- 新时期医院思想政治工作面临的问题与挑战
- 浅谈《民法典》的普及与自媒体传播方式的创新结合
- 提高建筑工程管理及施工质量控制研究
- 营销业扩报装与供用电优质服务关系探讨
- 转炉炼钢脱氧工艺研究
- 建筑工程预算造价的编制要点与审核方法管窥
- 加强企业党风廉政建设的对策思考
- 关于金矿采矿方法的优化选择思考
- sensitive
- sensitively
- sensitiveness
- sensitivenesses
- sensitives
- sensitive (to sth)
- sensitivities
- sensitivity
- sensitivityanalysis
- sensitivity aˌnalysis
- sensor
- sensorily
- sensors
- sensory
- sensual
- sensualities
- sensuality
- sensually
- sensual/sensuous
- sensuosities
- seaman
- seamen
- seamers
- seamier
- seamiest
- 阜 部
- 阜阳汉简
- 阜阿
- 阜陆
- 阜陵
- 阜陵恩
- 阞
- 队
- 队于车
- 队伍
- 队伍、行列
- 队伍严明整齐
- 队伍)开到(某处)去
- 队伍按一定要求摆成的行列
- 队伍架起帐篷住下
- 队伍的行列
- 队典
- 队列
- 队列条令
- 队列训练
- 队友
- 队员
- 队命
- 队子
- 队形