赵伟 赵晓侠


摘 要:传统消防机器人主要运用有刷直流電机和经典PID控制。提出一种将无刷直流电机和模糊PID控制算法相结合的电机驱动系统,为消防机器人提供低速大转矩驱动。通过建立无刷直流电机控制系统模型和模糊PID控制设计,在MATLAB/Simulink仿真环境下建立系统仿真模型。在仿真环境中将传统PID控制器和模糊PID控制器各项指标作对比,结果表明使用无刷直流电机并运用模糊PID控制器组成的消防机器人,具有良好的静动态性能、抗干扰能力及转速/转矩特性。为验证试验的可靠性,建立消防机器人实物模型,对机器人进行整体测试,表明模糊PID消防机器人爬坡、越障、爬楼梯能力强,具有实用价值。
关键词:消防机器人;低速大转矩;模糊控制;PID控制器;无刷直流电机
DOI:10.11907/rjdk.181712
中图分类号:TP303文献标识码:A文章编号:1672-7800(2019)001-0022-06
Abstract:Traditional fire fighting robots mainly use brushed DC motors and classical PID control. Now a brushless DC motor and fuzzy PID control algorithm are combined to form a motor drive system, which provides low-speed and high-torque drive for fire fighting robots. Through the establishment of a brushless DC motor control system model and the design of fuzzy PID control, a system simulation model is established under the MATLAB/Simulink simulation environment. In the simulation environment, the traditional PID controller and fuzzy PID controller are compared. The simulation results show that the fire robot composed of brushless DC motor and fuzzy PID controller has good static and dynamic performance and anti-jamming capability as well as good speed/torque characteristics. In order to verify the reliability of the test, a physical model of the fire-fighting robot is established. Through the overall testing of the robot, it is shown that the fuzzy PID fire-fighting robot has strong ability of climbing, obstacle crossing and stair climbing, and has practical value.
Key Words:fire-fighting robot;low speed high torque;fuzzy control;PID controller;brushless DC motor
0 引言
火灾事故发生时,消防人员进入火灾现场面临生命威胁, 消防机器人应运而生,成为抢险救灾不可或缺的一部分[1]。
消防机器人发展分为3个阶段,早期是程序控制消防机器人,然后发展为具有感觉工程的消防机器人,目前发展为智能化消防机器人[2-3]。美国、俄罗斯、日本、英国、德国等国家的消防机器人技术在国际上领先。美国的安德罗斯F6A机器人,搭载热成像和摄像系统。卡内基梅隆大学设计的干合成粘性材料攀爬机器人,模仿壁虎脚的吸附能力,可以在墙上作业。英国安防公司生产的消防遥控车,综合了监控、热成像、有线及无线控制。德国巴斯夫机器人研究所研究的遥控机器人,能够检测有毒气体和火灾位置。弗吉尼亚理工学院2015年设计的消防机器人ESCHER能够承受极端热量和冲击[4-5]。哈尔滨工业大学机器人研究所研制了5种吸附式爬壁机器人。西北工业大学设计了可通过钢丝攀爬建筑外墙,进行检测、破碎和救援的高层建筑消防机器人。目前,路虎60雪炮机器人、布鲁克50破拆机器人、JMX-LT50消防机器人等较为常用[6]。
消防机器人运动能力是其它功能实现的基础,本文采用履带式消防机器人,根据其行走特点,选择无刷直流电机和模糊PID控制器构成驱动系统,以提高消防机器人驱动能力。
1 无刷直流电机控制系统模型
消防机器人控制系统由主控机和被控机组成。
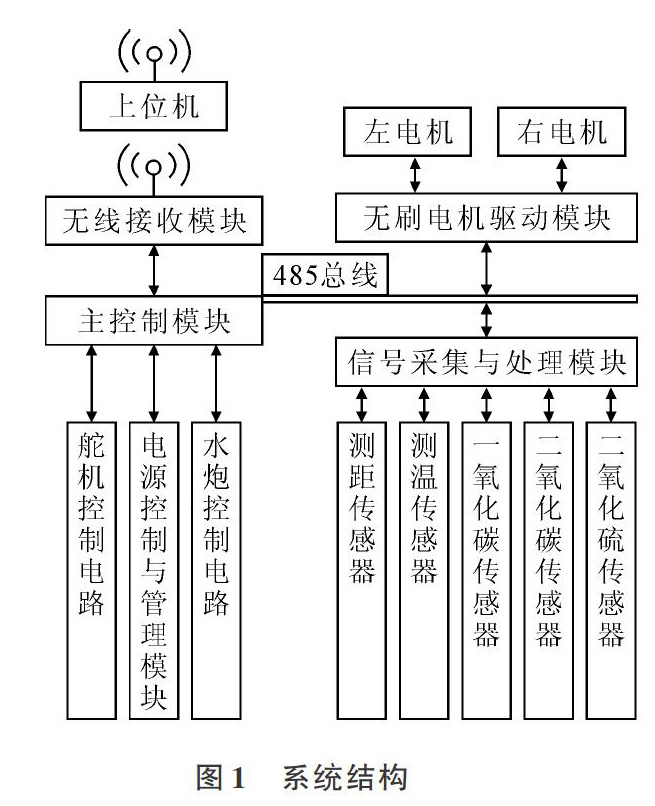
主控机是机器人的核心,起主要控制作用。被控机控制机器人本体,包括履带式地盘、电源系统、动力驱动系统、信号传输系统和数据采集系统等,通过无线方式与主控机进行图像及传感器信号的实时传输[7]。系统结构如图1所示。
消防机器人被控机的核心控制组件是嵌入式开发系统,系统通讯方式为485总线和无线通讯,行走底座上搭载各种传感器。消防机器人能够在室内和室外工作,动力系统是整体移动的关键,机器人越障、爬楼梯、爬斜坡都依靠动力系统。
1.1 无刷直流电机工作原理
无刷直流电机在转动时,位置传感器输出转子位置信号,电子换向电路驱动电机本体,电枢绕组依次馈电,此时定子上产生旋转磁场,永磁转子转动[9-10]。
1.2 无刷直流电机数学模型
2 模糊PID控制器设计
采用误差[e(t)]和误差变化率[ec(t)]作为模糊控制器输入,修正以后[kp]、[ki]、[kd]以二输入三输出形式出现。{NB,NM,NS,ZO,PS,PM,PB}为输入[e(t)]、[ec(t)]和输出[Δkp]、[Δki]、[Δkd]的模糊子集,分别代表负大、负中、负小、零、正小、正中、正大。误差[e(t)]和误差变化率[ec(t)]的论域为[-3,3],量化等级为{-3,-2,-1,0,1,2,3},对应实际值为{≤-2.5,(-2.5,-1.5],(-1.5,-0.5],(-0.5,0.5],(0.5,1.5],(1.5,2.5],}。
根据模糊控制模型和隶属度赋值表,将得出的参数代入下列公式:
3 系统仿真模型构建
在MATLAB/Simulink的仿真环境中建立无刷直流电机双闭环控制系统。
图5为系统仿真框架。选定的电机型号为常州凯恩86BL03。仿真系统由内环的电流环和外环的速度环组成。将HALL传感器检测到的转速值与速度给定值作比较运算,电流给定值通过模糊PID控制器算出。电流给定值与电流传感器实测电流值作比较运算, PWM控制单元根据电流PID调节器的运算结果进行输出,实现电机控制。
无刷直流电机MATLAB/Simulink系统有BLDCM本体模块、霍尔信号采集模块、换相表模块、逆变器模块、速度控制模块、电流控制模块[16-18],把这些模块组合起来构成无刷直流电机双闭环控制系统。下面简述每个模块参数设置。
3.1 模块化的BLDCM本体
根据MATLAB中无刷直流电机模型,对仿真模型进行参数设置。电机参数:相电阻[Rs]=1.52,相电感[Ls]=0.5E-3mH,反电势常数[Ce]=48.0004Vpeak/krpm,转矩常数[Cm]=0.458 37N·m/Apeak,转矩惯量[J]=9.25E-6kg·m2,摩擦系数=1E-9Nm·s,极对数[Ps]=4,负载转矩[TL]=0.127。
3.2 霍尔信号采集模块
3.3 换相表模块
换相过程中每个霍尔状态都会对应6个开关管中的一种状态,并且是一一对应关系。表5是换相对应情况。
3.4 逆变器模块
逆变电路是功率变换装置,不仅具有PWM电流调节功能,而且每个功率器件相当于一个机械换向器。图6为逆变器模块参数设置。
3.5 速度控制模块
模糊自适应控制器对速度控制模块进行反馈调节,PID参数通过模糊自适应控制算法,按照模糊规则在线自行调整[19]。传统PID控制系统中,PID参数的设置使用“临界比例法”确定。本仿真通过“先P再I最后D”的初始值整定方式确定初始参数,分别为:[kp0]=7.8,[ki0]=1.06,[kd0]=4.97。
3.6 电流控制模块
电机中存在高频振荡,经过速度调节以后误差变化率变小,采用PI控制器可提高系统抗干扰能力,避免输出响应发生振荡[20-21]。本仿真运用传统PID控制参数设置,控制参数分别为:P=20,I=10,仿真结果良好。
4 仿真结果与分析
由图13可知,在低速时,BLDCM可输出较大转矩,在高速时输出较小转矩。设定转矩10N·m,在速度由1r/min增加到额定转速3 000r/min过程中,在 750r/min可保证速度增加而BLDCM输出转矩不变,见图14;在转速大于750r/min后,随着转速增加,BLDCM输出转矩降低。
5 验证分析
5.1 硬件与软件系统设计
驱动部分功率为1 000W,驱动板、控制板输入电压是18V~75V。硬件电路由控制电路、电流(压)检测反馈电路、信号隔离电路、驱动电路、故障保护电路、主电路组成。控制电路用DSP(TMS320F2808)实现,信号隔离电路为高速光耦A4504,电流检测为耀华德昌科技有限公司的电流传感器HA55,驱动电路为三菱公司的PS21865模块。
主程序和子程序构成系统软件部分。主程序由系统初始化、捕获电机当前位置、设置中断标志等组成。中断服务程序由位置信号捕获中断子程序、电流采样中断、速度控制中断子程序、故障保护中断子程序组成[22-23]。
5.2 系统调试分析
系统测试内容包括整体连接测试及机器人行走测试。控制板硬件实物见图15,驱动板硬件实物见图16。
5.3 整体调试
PWM波控制频率是15KHZ,利用模糊PID控制算法编写程序,然后下载到控制芯片,开启运行,电机立即启动运转。改变PWM波占空比大小调节转速,改变硬件电路中正反转PWM的输出顺序可改变电机的正反转。上位机利用485总线和电机通讯。图17波形图中,上面的波形表示相电压波形,下面的波形表示線电压波形。根据波形可以看出,电机运行非常平稳,没有干扰,所以抗干扰能力较强。
5.3 机器人爬坡、越障、爬楼梯实验
将设计的电机驱动系统安装于消防侦察机器人进行相关实验,实验结果见图18-图20。
对消防机器人驱动系统进行爬楼梯、爬坡、越障实验。打开系统电源,驱动系统电源通电。通过主控机对被控机发出相应指令,机器人能迅速作出反应。驱动功率完全满足机器人在低速状态输出大转矩、高速状态输出小转矩需求。
6 结语
本文构建了无刷直流电机驱动控制系统模型,根据模糊自适应PID控制算法,设计出控制系统仿真。通过传统PID控制和自适应模糊PID控制性能仿真曲线对比,说明模糊自适应算法下无刷直流电机具有低速大转矩特点。为验证设计的可行性,进行了模型仿真。实验表明,在消防机器人驱动系统中运用模糊自适应PID控制,直流电机驱动具有良好的控制效果。
(1)自适应模糊PID算法在本设计中起到至关重要的作用,近年来各种算法运用日趋广泛,可尝试将其它算法运用到消防机器人驱动系统中。
(2)目前无传感器技术比较成熟,无传感器技术也可应用于无刷直流电机控制。
(3)随着通讯技术的逐步完善和机器人运动能力的增强,多消防机器人协调合作将是消防机器人发展趋势。
参考文献:
[1] 魏捍东,张智. 从央视大火探讨超高层建筑灭火对策[J]. 消防科学与技术,2010(9):606-612.
[2] 宫红锁,杨慧红,靳云玲. 中国消防机器人的展望[J]. 中国公共安全,2012(3):128-130.
[3] 李海涛,王敏,史凌斌,等. 消防机器人的发展和应用前景[J]. 中国公共安全:综合版,2007(1):161-164。
[4] 袁峥. 消防车智能监控系统研究与开发[D]. 郑州:郑州大学,2013.
[5] 刘军,程继国,尹志,等. 消防机器人灭火救援应用技术分析[J]. 消防技术与产品信息,2010(5):15-18.
[6] 姜华. 高空救援灭火机器人的设计[D]. 合肥:中国科学技术大学,2014.
[7] 夏长亮. 无刷直流电机控制系统[M]. 北京:科学出版社,2009.
[8] 张璇. BLDCM无位置传感器控制系统的研究[D]. 大连:大连理工大学,2009.
[9] 刘二利. 基于dsPlC的BLDCM无位置传感器控制系统研究[D]. 大连:大连理工大学,2007.
[10] 陈晓沖,王万平. 常规PID控制和模糊自适应PID控制仿真研究[J]. 机床与液压,2004(9):65-66.
[11] 陶永华,尹恰欣,葛芦生. 新型PID控制及其应用[M]. 北京:机械工业出版社,1998:36-38.
[12] 何衍庆,俞金寿,蒋慰孙. 工业生产过程控制[M]. 北京:化学工业出版社,2004(4):80-84.
[13] 赵永娟,孙华东. 基于MATLAB的模糊PID控制器的设计和仿真[J]. 微计算机信息,2009(7):48-49.
[14] 任先进,马瑞卿,卢颖,等. 无刷直流电机在电动转辙机中的应用设计[J]. 微电机,2016,49(1):64-67.
[15] 许明轩. 硅整流式交流发电机在活塞通用飞机上的应用[J]. 科技创新导报,2012(6):79-80.
[16] 周里津. 清洗机器人无刷直流电机驱动系统的设计[D]. 武汉:武汉理工大学,2012.
[17] KAN J M,LI W B,LIU J H. Fuzzy immune self-tuning PID controller and its Simulation[C]. IEEE Conference on,2008:625-628.
[18] YU X L ,LOU W Z. The application of the parallel decoupling fuzzy PID algorithm in the speed control system[C]. IEEE International Conference on Information Acquisition,2006:1185-1190。
[19] 谢俊. 基于DSP的无刷直流电机控制系统的设计与仿真研究[D]. 武汉:武汉理工大学,2010.
[20] 钱双杰,简献忠,刘瑞. 一种无位置传感器的无刷直流电机建模研究[J]. 电子科技, 2015,28(6): 195-196.
[21] 殷云华.基于DSP的无刷直流电机控制系统设计和仿真研究[D]. 太原:中北大学,2007.
[22] 刘金琨. 智能控制[M]. 北京:电子工业出版社,2005:50-52.
[23] 顾德英,罗云林,马淑华. 计算机控制技术[M]. 北京:北京邮电大学出版社,2007:22-25.
(责任编辑:杜能钢)
- 探索即兴演奏能力在双排键电子琴上的应用
- 谈唢呐演奏的艺术魅力
- 舞蹈真人秀对舞蹈文化的影响
- 浅析表现主义舞台的特点
- 柴可夫斯基与《洛可可主题变奏曲》
- 解析德加之美
- 古拜杜丽娜作品《十字架》的不确定性特征分析
- 人文视野下宗教文化对湄公河流域代表性民间舞蹈的影响
- 新西兰NMIT高校视觉传达设计教育模式探析
- 根植生活——论列宾作品中对人物内心世界的刻画
- 人文主义影响下的丢勒
- 浅析萨金特作品中的光影表现
- 泰国工艺美术培训的思考与探索
- 承孝相建筑外观的特征研究
- 基于亚当·斯密利己主义的大小乘佛教地位关系浅析
- 诗意的情爱——浅析莫迪里阿尼绘画中的女性形象
- 北美跨文化交际教育的现状及启示
- 中国传统美术元素在克里姆特绘画中的表现
- 谈俄罗斯声乐学派的教学特点
- 论瓦格纳《魏森东克歌曲》的艺术价值
- 舞台服装设计的艺术性探究
- 谈灯光设计师的综合文化修养
- 舞台美术设计浅论
- 造型与色彩在舞台美术设计中的运用
- 企业形象设计的内涵与现实意义
- self-surveys
- self-surviving
- self-survivor
- self-survivors
- self-suspended
- self-suspicion
- self-suspicions
- self-suspicious
- self-sustaining
- selfsustaining
- self-sustenance
- self-sway
- self-sways
- self-taught
- self taught
- self-taxation
- self-taxations
- self-taxed
- self-teacher
- self-teachers
- self-teaching
- self-tempted
- self-tender
- selftender
- self-tenderness
- 园圃和田地
- 园地
- 园子
- 园子图儿
- 园子地
- 园宅
- 园客
- 园客丝
- 园客意
- 园客独茧
- 园容
- 园寝
- 园庙
- 园所
- 园无石不秀,斋无石不雅
- 园林
- 园林中供休息和欣赏四周景观的高大建筑物
- 园林中供休息的高大的榭
- 园林中划分或联系区域范围的景物
- 园林中的花木
- 园林之母
- 园林化
- 园林失火——果燃
- 园林好
- 园林建筑