肖广兵 陈有超 季淦 孙宁 陈勇
摘要:车载自组织网络(VANET)是近年来智能交通领域的研究热点之一。在VANET网络中,智能车辆通过交互共享道路环境信息,可提高交通安全水平。在现实环境中进行大规模的车载自组织网络实验,在经济性和可行性上都具有较大困难。在SUMO交通仿真基础上开发出车辆防碰撞虚拟仿真系统,通过Google StreetMap获取真实道路环境(如路网、楼宇、植被等),并结合GEMV2软件对智能车辆在真实道路环境下的无线通讯链路质量进行评估,实现了虚拟行车交通流与车辆间无线通讯质量评估两位一体的模拟仿真,增强了车辆对周围道路交通环境的综合感知能力。
关键词:虚拟行车系统;交通仿真;SUMO;车载自组织网络;通讯链路评估
DOI:10.11907/rjdk.191860开放科学(资源服务)标识码(OSID):中图分类号:TP319文献标识码:A 文章编号:1672-7800(2019)010-0107-04
0引言
车载自组织网络(VehicularAd hoc Network,VANET)是近年来智能交通领域的研究热点之一,在城市道路交通系统中具有极其重要的研究价值。在现实环境中进行大规模的车载自组织网络试验,在经济性与可行性上都存在较大困难,而随着近年来计算机仿真技术的快速发展,采用虚拟仿真技术进行车载自组织网络仿真实验研究车辆避碰方案已成为一种趋势。该研究方式可在缩短研究周期、降低研究难度的同时,极大地节省研究经费,因此是一种行之有效的方法。
在大规模交通流仿真实验中,目前运用较广的是SU-MO交通仿真(Simulation of Urban Mobility)。文献[2]、[3]均采用SUMO进行交通仿真,取得了良好的仿真效果,但SUMO仿真仅限于交通流仿真,并不涉及交通流中车辆与车辆之间的通讯仿真,且仿真结果仅能从宏观视角进行展示,不具备以驾驶员为观测视角的道路实景仿真功能,缺乏直观性,难以实现避碰方案研究的最佳环境。
本文设计的车辆防碰撞虚拟仿真系统在SUMO仿真基础上进行二次开发,可将SUMO中任意车辆的仿真结果转化为以驾驶员为第一视角的行驶过程实时路况仿真,之后进一步结合GEMV2(Geometry-based Efficient propaga-tion Model for V2V communication)对车辆行驶过程中的通讯链路进行评估,从而实现虚拟行车和通讯质量评估两位一体的模拟仿真,使仿真结果的显示更加直观与真实。
1研究现状
目前,车载自组织网络仿真更加注重真实性、可拓展性以及系统集成性,并通过虚拟现实建模技术增强仿真的表现力和感染力。但目前该领域取得的研究成果,如车道公路通行能力仿真、非信号灯公路交叉口交通仿真、高速路人口匝道交通仿真等,仅是针对一些局部或特定问题的研究,其对网络和车辆流的分析都缺乏系统化考虑。
从涵盖范围来看,车载自组织网络仿真主要涉及两方面:一是对网络方面的仿真,通过建立车辆间通讯模型与算法,对车辆间的通讯质量进行评估与测试;二是对车辆流的仿真,通过仿真模型模拟车辆在路网中的运动状况。以上两方面的仿真工具目前都已发展得很成熟,如典型的网络模拟器NS-2,OPNET、OMNet++等,典型的交通模拟器CORSIM、VISSIM、SOMO等。
车辆运动会直接影響到车辆间的通讯状况,例如:当车辆经过高楼等遮挡物时,部分通讯链路会被遮蔽。反之,车辆间的通讯信息同样会作用于车辆运动,例如:当某车辆接收到其相对方向车辆驶来的信号,则发出避让提示,必然会引起车辆运动轨迹的改变。因此,在车载自组网仿真中,网络模拟器和交通模拟器是相互影响、相互作用的。以上提到的仿真软件在功能上相对独立,但整合性欠佳,距离实现网络与车辆流的联合仿真还有一定差距。
在文献[6]中,考虑到因距离产生的信号衰减及阻挡信号传播障碍物的影响,提出一种新的基于拓扑的可见性模型,以实现更精确的警告消息传播过程。但该方案在仿真模拟阶段多采用高速公路场景(最简单的布局、无交叉点)和曼哈顿风格的街道网格(街道正交排列),而很少使用真实的城市场景布局,因此难以实现仿真的准确性与真实性;在文献[7]中提出一种利用SUMO软件计算道路上车辆每个时刻位置以及道路特性的模拟方案,虽然一定程度上还原了真实的道路情况,但由于SUMO只能提供平面路网信息,因此该方案缺乏直观的行车交互感知,也未能实现对信号传播中障碍物影响的检测。
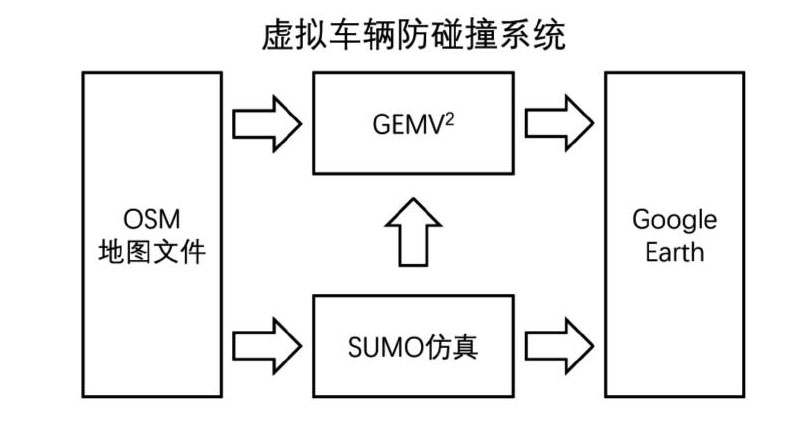
本文设计了一种虚拟车辆防碰撞系统,在SUMO仿真基础上结合Google Earth地图软件得到以驾驶员为第一视角行驶的实时路况,并结合GEMV2对行驶车辆通讯链路进行评估,较好地实现了网络与车辆流的联合仿真。
2系统设计与工作原理
车辆防碰撞虚拟仿真系统将交通仿真工具SUMO与通讯仿真工具GEMV2进行整合,运用本文开发的Python脚本,可将SUMO中产生的车辆移动样本生成可供GoogleEarth地图软件使用的KML文件,再通过通讯仿真工具GEMV2生成包含车辆间通讯链路的KML文件。最终将两者的仿真结果整合到Google Earth中进行演示,通过实时调整驾驶员视线与水平线的夹角,形成多视角车辆防碰撞虚拟仿真系统。
2.1交通仿真工具SUMO
SUMO(Simulation of Urban Mobility)是一种开源、微观、多模态的交通模拟器,可以实现车辆跟驰模型、换道模型、路径选择、信号灯控制、路口转向等仿真功能,能真实模拟城市道路中的车辆移动。SUMO中的每辆车都是明确建模的,有自己的路线,并在路网中独立移动。在默认情况下,模拟是确定性的,也可采用SUMO自带的脚本引入随机性,如使车辆在多路口路段内随机转向等。需要注意的是,其随机性始终受到路网中包含交通规则的限制,以保证仿真效果的真实、可靠。
包含道路信息的路网文件是用于SUMO仿真的基本文件。OpenStreetMap(一个开源地图软件)有丰富、准确的路网信息,采用提取自OpenStreetMap的路网文件,再根据仿真实验需求作进一步调整,基本可达到仿真要求,是一种高效、可行的方案。
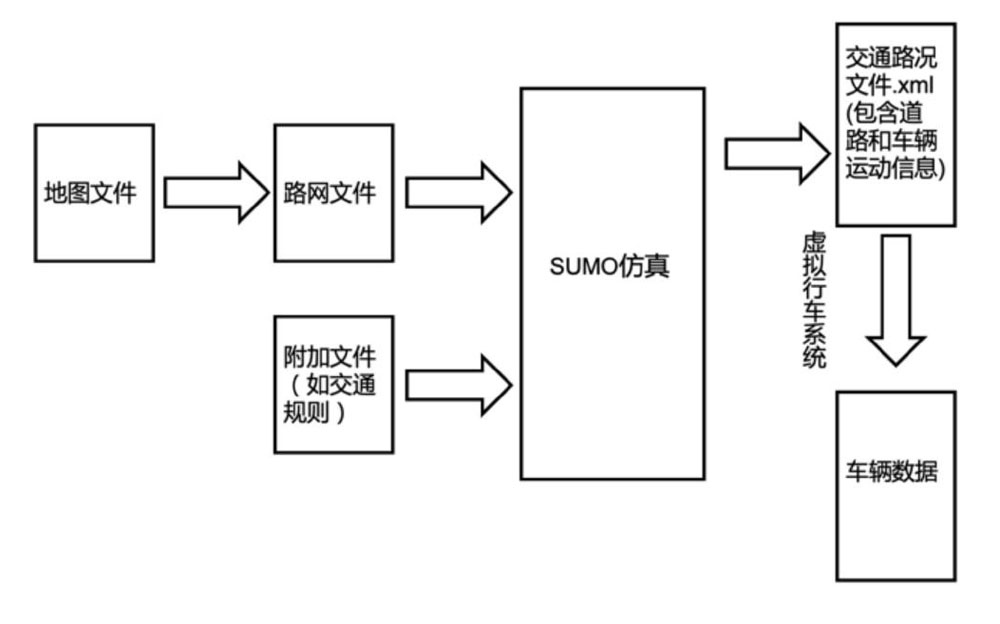
SUMO仿真是车辆防碰撞虚拟仿真系统的基础,虚拟行车系统将从SUMO仿真软件最终产生的包含道路和车辆运动的XML文件中提取车辆数据。
SUMO仿真基本步骤可简化如下:①从地图文件中提取路网;②运用SUMO提供的脚本生成符合路网交通规则的车辆;③运行SUMO交通流仿真。
2.2通讯仿真工具GEMV2
GEMV2是用于车辆到车辆(V2V)或车辆到基础设施(V2I)的基于几何模型的通信模型。使用GEMV2进行仿真的流程如图4所示。
运行GEMV2仿真,需要地图几何模型和车辆群运动参数两方面数据。其中,地图几何模型提取自SUMO仿真时用到的同一个OpenStreetMap地图文件,而车辆群运动参数提取自SUMO仿真文件。GEMV2根据地图几何模型实时计算并评估运动车辆之间的通信链路质量,通过确定高质量通信条件以达到避碰目的。例如,当车辆之间没有建筑物等阻断信号的物体,且彼此在其广播能力范围内时,可通讯质量较好;反之,车辆通讯质量会随着车辆间阻隔物体的增多或车辆间距离的增大而下降。
GEMV2仿真效果如图5所示(彩图见封三),其中蓝色线条代表通讯链路通讯质量较好,反之,黄色线条代表该通讯链路通讯质量较差。
2.3Google Earth
Google Eaah是一款由Google公司开发的虚拟地球软件,其将卫星照片、航空照相和GIS布置在一个地球的三维模型上,支持多种操作系统平台。由于Google Eaah提供了大量通用的功能模块与接口,基于Google Eaah进行二次开发的应用非常丰富,最常见的开发领域是GIS,但在交通模拟方面还十分欠缺。Google Earth丰富的三维模型可为交通模拟提供实验所需的道路,从而大大减少模拟过程中道路环境搭建的工作量及搭建成本。
Google Eaah三维模型是基于KML(Keyhole MarkupLanguage,Keyhole标记语言)的,KML是一种基于XML的標记语言,利用与XML相似的语法格式描述地理空间数据(如点、线、面、时间、位置及模型等),从而构建地理模型。通过在一系列连续的时间点上定义车辆位置、前进方向、速度等数据,即可实现车辆在Google Earth地理模型道路上行驶的仿真效果。
2.4仿真整合
运用本文开发的Python脚本,从SUMO仿真软件产生的XML仿真文件中提取车辆运动参数,包括任意时间点上的车辆经纬度、车速、车辆行驶方向等信息,并按照一定格式转换为Google Eaah专用的KML文件。另一方面,运用GEMV2生成的实时通信链路质量评估仿真结果也以KML文件形式同步加载至Google Eaah中。只要确保两个KML文件中的时间轴同步,即可实现虚拟行车与通讯质量评估两者合一的虚拟车辆防碰撞系统。虚拟行车系统整体仿真流程如图6所示。
车辆防碰撞虚拟系统仿真效果如图7所示(彩图见封三),结果以类似视频的形式进行展示。随着时间推移,车辆沿着设定路径行驶,在以驾驶员为第一视角显示道路实景的同时,生成车辆间的通讯链路。
3结语
本文创新地将SUMO交通仿真与Google Earth相结合,开发出仿真效果更加立体直观、道路周边景物更加丰富的虚拟车辆防碰撞系统,同时结合GEMV2进行车辆间通信质量评估,将原本分离的SUMO交通流仿真与GEMV2通信仿真整合为一个体系,为车载自组织网络仿真提供了一种有效的解决方案,实现了车辆避碰方案中的真实环境搭建,解决了网络模拟与交通模拟相互独立的问题,达到了更佳的虚拟仿真效果。然而,本文开发的系统受限于目前的技术发展状况,车辆防碰撞虚拟仿真系统中缺少人在交通流中的运动状态。因此,将运动方向和运动状态多变的人加入到车辆防碰撞虚拟仿真系统中将是未来无人驾驶交通系统仿真研究的方向。
- 互联网+舞台实践课程的创新思考
- 浅析江苏紫金合唱节追梦精神的传承
- 当代流行音乐中钢琴元素的发展及重要性
- 浅谈勃拉姆斯《F小调第一单簧管奏鸣曲》作品120号
- 浅谈歌曲《春思曲》的风格特征及演唱处理
- 浅析《苍歌引》的创作背景与演奏
- 扬琴现代作品《春》演奏风格与技法分析
- 筝曲《秦土情》技巧运用
- 浅析《黄河怨》钢琴伴奏
- 浅析《黄河怨》的情感表达
- 低音提琴曲《泪》的作品分析
- 由肖武雄竹笛独奏曲《挽歌》演奏法分析谈其创新性
- 《请不要做情郎》的演唱技巧与艺术风格
- 不同类型的文字信息对音乐理解的影响
- 柯达伊男声合唱创作分期研究
- 声乐表演艺术中二度创作的重要性
- 男高音声乐作品创作特征与演唱分析
- 小提琴作品民族化创作手法分析
- 浅谈音乐表演的二度创作
- 思维导图带来的音乐创新性思维
- 中职音乐教学中节拍与节奏的应用分析
- 音乐课堂上悄然绽放的民族舞蹈之花
- 浅谈古筝教学中“音乐”与“技术”的交融
- 如何提高小学生音乐识谱能力
- 初学者对民族与美声的理解研究
- scramblers
- scrambles
- scramble²
- scramble¹
- scrammed
- scramming
- scrams
- scrap
- scrapable
- scrapbook
- scrapbooks
- scrape
- scrapeage
- scrapeages
- scrape by
- scraped
- scraped through
- scrape home
- scrapers
- scrapes
- scrape/scratch off
- scrapes through
- scrape sth together/up
- scrape sth ↔ together/up
- scrape through
- 扯谎
- 扯谎作假
- 扯谎支吾
- 扯轮子
- 扯软把
- 扯里狲
- 扯铃扯到半空中
- 扯长舌头
- 扯闲呱淡
- 扯闲白儿
- 扯闲盘儿
- 扯闲篇
- 扯闲篇儿
- 扯闲话
- 扯霸子
- 扯顺风旗
- 扯风
- 扯风子
- 扯首
- 扯鸡骂狗
- 扯鼓夺旗
- 扰
- 扰乱
- 扰乱世界,危害社会的人
- 扰乱世道和人心的音乐