曹延超
摘要:随着无人飞行器的发展,四旋翼飞行器逐渐受到更多研究者的关注。本文主要提出了一种基于STM32的姿态测量系统设计方案。该姿态测量平台是采用STM32为主控制器的数据采集和计算姿态平台。在本文中,整个系统在STM32上移植μC/OS-Ⅲ操作系统,实现对加速度、角速度、磁阻数据等的采集,采用四元数计算、卡尔曼滤波等实现姿态数据测量,通过无线模块实现数据流的传送。通过无线接收模块,PC端上位机实现姿态获取展示。最后,通过对建立的实验平台的综合实验,验证了本文系统的可行性和有效性,能够实时采集有效的姿态数据。
关键词:四旋翼飞行器;姿态测量;STM32;μC/OS-Ⅲ;四元数
中图分类号:V19
文献标识码:A
0 引言
四旋翼飞行器近来已经成为研究的大热课题。四旋翼飞行器是一种四螺旋桨驱动的、可垂直起降的飞行器。四旋翼飞行器在总体布局形式上属于非共轴式碟形飞行器,比起普通飞行器结构紧凑,升力更大,4只旋翼能够相互抵消反扭力矩,设计更加简单。四旋翼飞行器以其新颖的外形、简单的结构、低廉的成本、卓越的性能以及独特的飞行控制方式等诸多优势吸引了越来越多的科研人员,成为了现在的研究热点。目前国内外都对四旋翼飞行器进行了大量的研究,如美国Draganflyer公司研制的DraganflyerⅢ和宾夕法尼亚大学的HMX4等。
姿态测量是无人四旋翼飞行器重要功能之一,无人四旋翼飞行器需要实时准确地采集来自多路传感器的数据,并根据数据采集结果获取姿态,通过控制器完成对无人飞行器的控制。本文将主要围绕四旋翼飞行器的姿态测量系统展开软硬件的设计。本文采用ARM Cortex-M3架构为基础的STM32开发板,移植最新的μC/OS-Ⅲ实时操作系统,通过全数字三轴角速率陀螺仪及三轴加速度传感器和无线传输模块对无人四旋翼飞行器的姿态进行采集,通过无线传送最后实现上位机的三维立体展示。本文将μC/OS-Ⅲ实时操作系统应用到四旋翼飞行器数据采中,提高了四旋翼飞行器的数据采集能力。最终通过本文实现了一个稳定的四旋翼飞行器姿态测量的实验平台。
1 四旋翼飞行器原理与系统框架设计
1.1四旋翼飞行器简介
1.1.1四旋翼飞行器结构
四旋翼直升机,国外又称Quadrotor,Four-rotor,4rotors helicopter,X4-flyer等等,是一种具有四个螺旋桨的飞行器并且四个螺旋桨呈十字形交叉结构。飞行器相对的四旋翼具有相同的旋转方向,可以分为两组,两组的旋转方向不同。如图1,与传统的直升机不同,四旋翼直升机只能通过改变螺旋桨的速度来实现各种动作。
1.1.2四旋翼飞行器工作原理
简化的四旋翼飞行器可以得出,四旋翼飞行器具有呈十字交叉的四个螺旋桨,它通过改变四个螺旋桨的升力来获取不同的运动,主要方法是改变螺旋桨的转速。四旋翼有且仅有四个输入力,却需要产生6个自由度方向的运动,属于典型的欠驱动系统。四旋翼飞行器具有高度的耦合动特性,一个螺旋桨速度发生变化,将会引起整个系统的不稳定。四旋翼飞行器在空间共有6个自由度可以通过调节不同电机的转速来实现。基本运动状态分别是:1)垂直运动;2)俯仰运动;3)滚转运动;4)偏航运动;5)前后运动;6)侧向运动。
1.2四旋翼飞行器系统框架设计
1.2.1系统框架设计
本系统是设计基于STM32的四旋翼飞行器姿态测量系统,本系统采用自顶向下的设计思路进行。STM32系列基于专为要求高性能、低成本、低功耗的嵌入式应用专门设计的ARM Cortex-M3内核。按性能分成两个不同的系列:STM32F103“增强型”系列和STM32F101“基本型”系列。增强型系列时钟频率达到72MHz,是同类产品中性能最高的产品;基本型时钟频率为36MHz,以16位产品的价格得到比16位产品大幅提升的性能,是16位产品用户的最佳选择。整个系统分为传感器测量部分,无线传输部分和上位机显示部分。传感器测量部分主要负责将传感器的数据获取,根据获取的传感器数据转换成所需的数据,整合几个传感器的数据,根据算法得到相应的姿态状况。无线模块将获取的姿态状况以及测得的角速度、加速度和电子罗盘数据转换成所需的特定格式,最后通过STM32端的无线模块传输到ATmega16端的无线接收模块。上位机部分接收来自ATmega16的串口数据,将获取的姿态状况显示出来。
1.2.2姿态测量平台设计
四旋翼飞行器的姿态测量主要依靠处理传感器数据获取。本文的姿态测量系统将使用加速度传感器、角速度传感器和电子罗盘来对四旋翼飞行器的姿态做测量。在本课题中的四旋翼姿态测量系统的陀螺仪角速度传感器采用的是L3G4200D,加速度计采用的是BMA180,电子罗盘采用的是HMC5883L。软件部分,本文移植最新的μC/OS-Ⅲ实时操作系统,通过全数字三轴角速率陀螺仪、三轴加速度传感器、磁阻传感器和无线传输模块对无人四旋翼飞行器的姿态进行采集,实现测量捷联惯性系统姿态角。在本文中采用了四元数法来更新姿态测量。
2 姿态测量系统
2.1数据采集平台
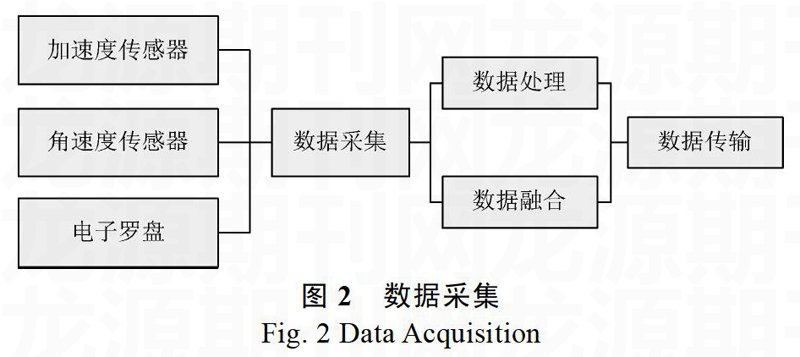
在这个系统中主要是获取相应传感器的数据,然后将得到的传感器的数据进行处理,得到姿态测量平台的各项姿态参数,为旋翼电机的控制提供参数。如图2,本姿态测量平台主要是获取当前的三轴加速度、三轴角速度和磁通量,更新当前的姿态,得到飞行器平台的姿态,为四个旋翼电机的控制提供参数,引导飞行器的飞行。
2.2无线传输
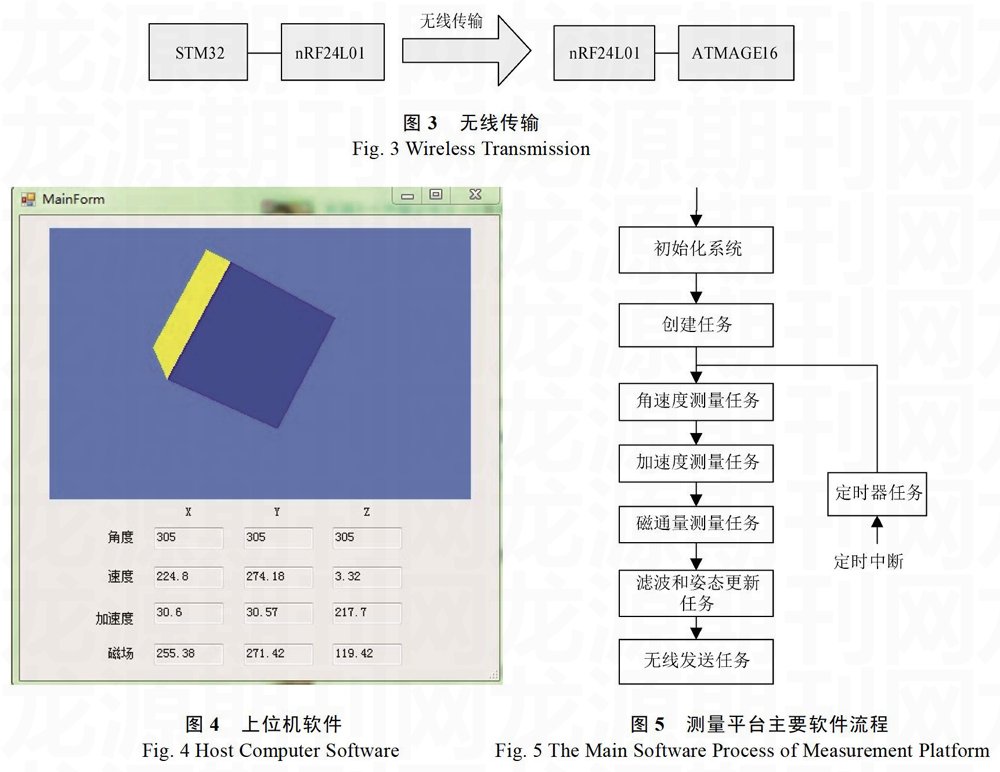
在本文四旋翼飞行器姿态测量系统中采用的无线模块为nRF24L01模块,无线模块的发送端主机为四旋翼飞行器姿态测量系统的主控制器STM32,无线模块的接收端为ATmega16,发送的数据为姿态数据与三轴的加速度、角速度、磁通量。如图3为无线传输的示意图。
2.3上位机展示
如图4,上位机显示部分显示四旋翼飞行器姿态测量系统的测量结果。在上位机的显示部分主要显示的是一个三维的姿态变换和三轴的角度、角速度、加速度、磁通量数值。该上位机比较简单明了,方便对姿态进行观测。上位机接收的数据格式为“$x1 x2 x3 x4 x5 x6 x7 x8 x9 x10 x11 x12$”,其中传输12个数据,分别为三轴姿态数据、三轴角速度、三轴加速度和三轴磁通量。这些数据将分别打印在对应位置,其中姿态数据将用于三维图像的姿态更新。
3 姿态测量软件算法
3.1采集平台软件设计
嵌入式操作系统是一种支持嵌入式系统应用的操作系统软件。μC/OS-Ⅲ前身是μC/OS,最早出自于1992年美国嵌入式系统专家Jean J.Labrosse在《嵌入式系统编程》杂志的5月和6月刊上刊登的文章连载,并把μC/OS的源码发布在该杂志的BBS上。在本文中,移植μC/OS-Ⅲ的主要步骤包括:1)从官网下载源代码;2)建立IAR工程;3)BSP移植;4)编译测试。
在完成基本操作系统之后,在工程中将创建任务,实现应用开发。如图5为程序流程图,主要包括以下几个模块:1)角速度测量任务;2)加速度测量任务;3)测通量测量任务;4)滤波姿态更新任务;5)定时中断任务;6)无线发送任务。任务间通过发送消息和信号量来进行通信,实现任务的工作。
3.2四元数姿态解析
在3D图形学中,最常用的旋转表示方法便是四元数和欧拉角,比起矩阵来具有节省存储空间和方便插值的优点。两种表达方式可以互相转换,计算公式采用3D笛卡尔坐标系。
如图6,欧拉角-XYZ系统(固定),XYZ系统(旋转),线的节点,标记为N。四元数可以用于描述一个坐标系或矢量相对某一坐标系的旋转幅度。这个转角的一半余弦值可以用四元数的标量部分来表示,瞬时转轴的方向、瞬时转动轴与参考坐标系轴间的方向余弦值可以用矢量部分来表示。一个四元数可以包含转轴的方向和转角大小信息,往往称其为转动四元数。如R′=qRq′表示矢量R相对参考坐标系旋转一个转角,旋转轴的方向由四元数的虚部确定,cosα、cosβ、cosγ表示旋转轴n与参考坐标系轴间的方向余弦值。式中:R为某矢量;
本文系统的实验将围绕得到的传感器数据分析,得到的传感器数据进行姿态数据更新。定时中断发送信号量使得数据得以更新,更新数据后运对这些数据进行上述计算处理,得到当前姿态,最后通过无线模块和串口传输给PC。
4 平台测量实验
在完成本四旋翼飞行器姿态测量系统后,对系统的各项参数进行了实验,如图7、图8、图9、图10,得到三轴加速度、三轴角速度、三轴磁通量和计算的实时姿态数据。
通过实验可以知道,本文设计的姿态测量系统在实际中是可行的,能够实时的测量出飞行器平台的姿态。通过跟踪上位机的三维姿态展示可以很好的反馈出目前的空中姿态情况。
5 总结
本文给出了一个基于STM32的四旋翼飞行器的姿态测量系统设计;通过移植最新的实时操作系统μC/OS-Ⅲ创建任务,实现系统流程;通过陀螺仪、加速度传感器等传感器来实现捷联惯性系统、四元数更新姿态;采用了卡尔曼滤波来提高系统的稳定性和姿态精度;最后,本文在平台实现中验证了姿态测量数据基本稳定,基本达到了设计要求。
- 浅析初中语文的文言文教学方法
- 浅谈如何在高中英语教学中渗透文化意识
- 中小学英语教学和谐师生关系的构建
- 新课程改革背景下高中英语阅读教学策略探微
- 中职英语口语教学现状及对策分析
- 初中英语教学中如何促进学生“以读促写”
- 探讨高中英语教师有效提问与学生批判性思维的培养
- “一词多义”在高中英语教学中的理解和运用
- 初中英语校本教材的开发和实施
- 基于核心素养的小学英语教学研究
- 浅谈初中化学教学中趣味化学实验的应用
- 基于核心素养下学生审题障碍及对策
- 数学游戏在小学数学教学中的应用研究
- 如何在初中物理实验教学中培养学生创新思维能力
- 谈情境教学法在初中语文教学中的应用
- 核心素养下的高中人文地理教学设计创新研究
- 刍议小学语文阅读教学中口语交际能力的培养
- 分层教学在初中数学教学中的应用与实践
- 基于课程标准的“朝鲜族中小学汉语写作教学模式”推广有效衔接研究
- 基于体验式德育活动模式的构建分析
- 基于我国初中毕业生体育考试制度实施现状的研究
- 游戏在培智学校体育课堂中的运用分析
- 小组合作学习中小组长的积极作用探析
- 对农村小学一年级学生进行养成教育的策略研究
- 浅谈如何在小学数学教学中培养学生的学习兴趣
- toothachy
- toothbrush
- toothbrushes
- tooth-like
- toothlike
- toothpaste
- toothpastes
- toothpick
- toothpicks
- tooths
- tooting
- too/too much
- toots
- top
- top-10, top-100, etc.
- topaz
- topazes
- topazine
- topazy
- top brass
- topbrass
- top/cap
- topdog
- top dog
- topdollar
- 整齐的贝壳
- 整齐秀丽
- 整齐美好的样子
- 整齐美观
- 整齐而严明
- 整齐而有条理
- 整齐茂盛的样子
- 整齐装束
- 整齐陈列
- 整齐鲜明
- 敵
- 敶
- 敷
- 敷余着一个
- 敷写
- 敷华
- 敷告
- 敷和
- 敷天
- 敷天光
- 敷奏
- 敷宣
- 敷寻
- 敷展敷扬
- 敷广