

摘 要:针对既有车辆失稳判定方法存在的不足,开展了车辆横向稳定性关于模式识别的研究,提出了一种基于K均值聚类分析的车辆横向稳定性判别方法.利用CarSim建立整车动力学模型,采用K均值聚类算法对车辆行驶状态数据进行离线聚类分析,得到离线聚类质心及其危险等级.搭建CarSim与Simulink联合仿真平台,计算车辆实时行驶数据点与离线聚类质心之间的欧氏距离,设计了车辆横向稳定性判定指标,对车辆行驶稳定性进行了在线识别.该判定方法充分利用车辆离线数据和实时数据,对车辆行驶状态数据进行数据挖掘.仿真结果表明,该判定方法能够准确实时量化车辆的行驶稳定性,为控制系统的介入时机与程度提供判据.
关键词:无监督学习;车辆工程;车辆稳定性辨识;K均值聚类算法;离线聚类;在线识别
中图分类号:U461.6 文献标志码:A
Abstract:As for the shortcomings of the existing methods of vehicle instability determination, the study on pattern recognition of vehicle running stability was carried out, and a new method of judging the vehicle lateral stability based on K means clustering algorithm was proposed. The vehicle dynamics model was established by CarSim, and the offline clustering centers and its danger level were obtained by offline clustering analysis of vehicle running state data through K means clustering algorithm. Then, the CarSim and Simulink cosimulation platform was built and Euclidean distance between data points and cluster centroids was also calculated. Vehicle running stability criterion in Simulink was designed, and the vehicle running stability online was identified. This identification method made full use of the comparison of offline data and real time data for data mining of the vehicle running data. The simulation results show that the method can accurately and realtimely quantify the vehicle's lateral stability considering various parameters, which can provide the criterion for intervention timing and degree of control system.
Key words:unsupervised learning;vehicle engineering;vehicle stability identification;Kmeans clustering algorithm;offline clustering;online identification
車辆稳定性判据决定了车辆稳定性控制系统的介入与退出时机,是车辆稳定性控制的基础[1].提高车辆行驶安全性、降低交通事故发生率已成为汽车界亟待解决的关键问题[2].其中,对车辆行驶稳定性的判定与辨识是车辆稳定性控制系统的基础.
余卓平等人[1]提出了双线法与横摆角速度法联合的车辆稳定性判定方法,协调对质心侧偏角和横摆角速度的控制,并获取稳定性判据的相应阈值数据库,用于在控制过程中查表获得车辆的稳定区域边界.熊璐等人[2]提出了在极限工况下,选取质心侧偏角质心侧偏角速度的相平面分析车辆行驶稳定性,以此作为基于非线性车辆模型的稳定性判据.刘飞等人[3]提出改进的五特征值菱形稳定区域划分方法,根据相图的变化规律选用了随平衡点移动的菱形区域作为稳定区域;通过大量仿真建立了全工况下稳定区域特征值的查表数据库.罗玉涛等人[4]建立了7自由度车辆动力学模型,根据相平面法设计了基于失稳能量比的车辆稳定性判断公式.采用能量法推导了车辆失稳动能与纵向运动动能方程式,基于相平面法提出了车辆稳定性判据,以判断车辆的行驶稳定状态.石文等人[5]建立了3自由度非线性车辆动力学模型,通过对轮胎力非线性范围内车辆瞬态稳定性变化过程的分析,研究了相空间轨线在非稳定中心平衡点连续统邻域内的变化细节,分析了车辆临界稳定状况与轨线变化细节之间的关系.
Verschuren[6]提出了使用赫尔维茨定理(Hurwitz Criterion)快速寻找车辆稳定性临界值.Sadri等人[7]提出了2个新的Lyapunov[8]函数,当车辆匀速直线运动时,将李亚普诺夫直接法应用于非线性车辆的横向稳定性分析.Dandach等人[9]提出了利用间隔分析方法计算并预测车辆稳定域,通过轮胎载荷转移率LTR、纵向滑移率和车轮侧向滑移角给出了保证车辆安全的稳定域的临界值,并使用模拟数据进行了验证.Chen等人[10]建立了4自由度车辆动力学模型,通过对固定速度下转向特性的研究,分析了不同转向盘转角输入下横摆角速度和随侧倾角变化的根轨迹,进而分析、评价了车辆侧倾稳定性.Sun等人[11]建立了7自由度车辆动力学模型,使用轮胎垂直载荷转移率来评价车辆侧倾稳定性,分析了车辆结构参数和使用参数对车辆侧倾稳定性的影响.
目前常用的车辆稳定性判定方法中,存在所建车辆模型不精确、对车辆的状态参数考虑不全面、仅依靠部分车辆行驶状态参数(如质心侧偏角或横摆角速度)衡量车辆行驶稳定性等问题.本文充分考虑了车辆行驶过程中的多项横向稳定性状态参数,基于对车辆行驶状态数据的挖掘分析,提出了一种车辆横向稳定性判据,即利用K均值聚类分析对车辆所处的危险程度进行等级划分,旨在为车辆稳定性控制策略的设计提供科学依据.
1 构建车辆模型
利用车辆仿真软件CarSim建立车辆模型的过程如下.
1.1 选择车辆类型
从CarSim的主要界面选定车辆模型“CClass,Hatchback,2012”,为掀背式两厢轿车,车辆参数详见表1.
1.2 设置车辆的输入参数
本文仿真试验条件为转向盘180°斜阶跃输入,需设置车辆速度、转向盘转角及其变化规律,其他项目保持系统默认即可,建立车辆纵向速度为40~120 km/h,步长为5的匀速行驶工况,每种速度下的仿真时间均为10 s.
1.3 设置车辆的输出参数
2.2 离线聚类与分析
聚类是将数据划分到不同类或簇的过程,使得同一个簇中的对象有很大的相似性,不同簇间的对象有很大的相异性.聚类分析是一种探索性的分析,属于无监督学習,在分类的过程中,不必事先给出一个分类的标准,K均值聚类能够从样本数据出发,自动进行分类[12].
聚类分析常用的指标为“距离”和“相似系数”,假定研究对象均用所谓的“点”来表示,在聚类分析中,一般的规则是将“距离”较小的点或“相似系数”较大的点归为同一类,反之归为不同的类,聚类结果需要研究者进行主观判断和后续分析.
离线聚类的目的是通过对离线数据的聚类,得到离线聚类质心.本文将车辆横向稳定性划分为4个等级,即得到4个聚类质心,每个聚类质心代表一种横向稳定状态.4个危险等级所代表的含义如表2所示.
2.2.1 K均值离线聚类
K均值聚类算法是基于划分法的聚类方法,也是最常用、最知名的聚类算法.K均值聚类方法过程如下:
1)根据需要确定聚类个数为4;
2)初始化聚类质心,本文以等间距取点确定初始聚类质心;
3)设置最大迭代步数Jmax =1 000;
4)设置质心偏移量Δd=0.000 1;
5)点的分配,即根据每个对象与聚类质心的欧氏距离,将每个对象分配给最相似的簇;
6)更新聚类质心,即重新计算每个簇中对象的平均值点作为新的聚类质心;
7)重复执行第5)和第6)步,直到各个簇不再发生变化,即满足3)或4).
由离线转向盘斜阶跃输入工况特点及图2转向盘转角可知,(0 s,0.5 s)直线行驶状态的危险等级对应图3中的状态A;0.5 s时开始转动转向盘,
车辆开始产生横向位移及摆动,车辆稳定性降低,对应图3中的状态C;由于离线数据为速度逐渐增大的斜阶跃响应,后续对应的稳定性逐渐降低,最后可
能会发生失稳,因此,结合图3可知,最安全的行驶状态为A,最不稳定的行驶状态为B,次不稳定的行驶状态为D.综上所述,车辆各行驶状态的危险性由低到高排序为:A
表征车辆横向稳定性的状态参数包括:侧向速度v、质心侧偏角β、前轴轮胎垂直载荷转移率LTR1,这些参数越大车辆行驶状态越危险,据此对离线聚类结果进行危险等级的划分,将危险等级由低到高排序为:A
3.1 CarSim与 Simulink联合仿真平台的搭建
为了实时判断车辆横向稳定性,在离线聚类得到聚类质心的基础上,搭建CarSim与Simulink联合仿真平台.本文将CarSim的输出与Simulink的输入相连接,对车辆行驶状态在线识别,由于没有对车辆进行控制,因此,本文搭建的联合仿真平台属于开环系统.
建立CarSim与Simulink联合仿真平台,在CarSim中选定车辆模型、设置仿真工况及输出参数,再将车辆模型发送到Simulink,并根据需要建立相应的Simulink模型,即可进行在线联合仿真.CarSim可以为Simulink提供在线聚类所需的车辆状态参数,包括由传感器直接测量的参数和经过Simulink运算得到的间接参数如LTR1和LTR2;在线识别根据在线联合仿真输出数据与聚类质心的欧氏距离判定车辆横向稳定性,输出车辆行驶状态的危险等级,其过程原理如图5所示.
3.2 在线识别结果分析
在线识别的仿真工况为车速77.5 km/h的转向盘斜阶跃输入,联合仿真得到的车辆实时行驶状态数据点与聚类质心的欧氏距离如图6所示,相应的危险等级如图7所示.
图6中点线Ed1表示车辆实时行驶状态数据与第1危险等级聚类质心之间的欧氏距离,虚线Ed2表示车辆实时行驶数据与第2危险等级聚类质心之间的欧氏距离,点画线Ed3表示车辆实时行驶数据与第3危险等级之间的欧氏距离,实线Ed4表示车辆实时行驶数据与第4危险等级聚类质心之间的欧氏距离.
由图2可知,在转向盘斜阶跃输入下的(0 s,0.5 s)属于直线行驶,车辆处于稳定状态,对应图6中车辆行驶状态参数与各聚类质心的欧氏距离处于稳定阶段,此时车辆行驶状态数据与第1危险等级聚类质心的欧氏距离最小,车辆行驶状态属于第1危险等级(见图7);0.5 s时开始匀速转动转向盘,1.5 s转角达到180°,此后维持该转角不变,车辆实时行驶状态数据与离线聚类质心之间的欧氏距离处于波动状态,车辆行驶稳定性下降;由图7可知,在1.065 s时车辆行驶状态由第1危险等级(安全状态)直接上升到第3危险等级(典型潜在危险),安全性降低,后续一直处于第3危险等级.
为了探究车辆在转向盘斜阶跃输入下车辆危险等级随车速和时间的响应规律,通过多组工况下的联合仿真试验,从中选择了具有代表性的几组数据进行绘图说明.图8为某速度区间内危险等级的变化趋势图,图8中每条线代表忽略响应时间的同一危险等级变化的多条线束.当速度为40~60 km/h时,车辆由第1危险等级变到第2危险等级;当速度为67~90 km/h时,车辆由第1危险等级突变到第3危险等级;当速度为95~120 km/h时,车辆由第1危险等级突变到第4危险等级.由此可知,车辆在转向盘斜阶跃输入下危险等级的响应会出现跳跃式的突变,且速度越高跳跃幅度越大.
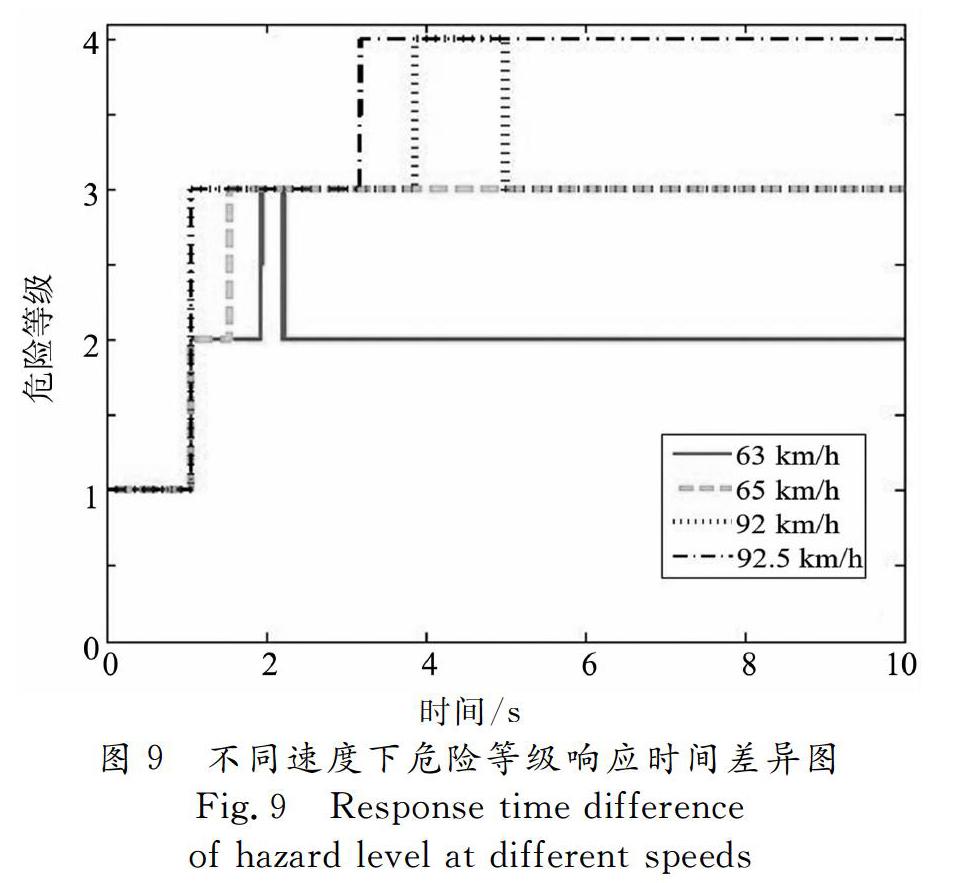
图8中,3个速度区间的危险等级各变化了1次,都没有产生波动.其他速度区间60~67 km/h和90~95 km/h危险等级的变化分别选取速度为63、65、92和92.5 km/h进行分析,其危险等级变化趋势如图9所示.速度为63 km/h的危险等级变化趋势为1→2→3→2,在第2和第3危险等级之间产生了波动;速度为65 km/h的危险等级变化趋势为1→2→3,未产生波动;速度为92 km/h的危险等级变化趋势为1→3→4→3,在第3和第4危险等级之间产生了波动;速度为92.5 km/h的危险等级变化趋势为1→3→4,未产生波动.
由图9可知,通过危險等级跳跃点的位置,可探究车辆在不同速度下危险等级变化趋势的时间响应规律.当危险等级变化趋势为2→3时,速度为92.5 km/h和92 km/h的响应时间要明显早于速度为65 km/h和63 km/h的响应时间,速度为65 km/h的响应时间要早于速度为63 km/h的响应时间;当危险等级变化趋势为3→4时,速度为92.5 km/h的响应时间早于速度为92 km/h的响应时间.由此可得,在相同转向盘斜阶跃输入下,随着速度的逐步增大,车辆横向稳定状态发生变化所需的响应时间逐渐变短.
4 结 论
针对车辆操纵稳定性控制系统中车辆的横向失稳判据进行了详细研究,使用K均值聚类分析方法对车辆行驶状态离线数据进行离线聚类,得到离线聚类质心及其危险等级;结合车辆行驶状态数据与聚类质心的欧氏距离设计了车辆实时稳定性判断准则,搭建了CarSim与Simulink联合仿真平台,对车辆转向盘斜阶跃输入工况的车辆横向稳定性进行在线识别.结果表明,该判定准则能够根据车辆行驶状态参数将车辆横向稳定性分为4个等级,且划分的结果与实际车辆危险情况一致,该判定准则为后续控制系统的介入时机与程度提供理论依据.
后续需要进一步研究K均值聚类分析对不同车辆和不同工况的普适性,并进行相应的实车试验.
参考文献
[1] 余卓平,冷搏,熊璐,等.双线法与横摆角速度法联合的车辆稳定性判据[J].同济大学学报(自然科学版),2015,43(12):1841-1849.
YU Z P,LENG B,XIONG L,et al.Vehicle sideslip angle and yaw rate joint criterion for vehicle stability control [J].Journal of Tongji University(Natural Science),2015,43(12):1841-1849.(In Chinese)
[2] 熊璐,曲彤,冯源,等.极限工况下车辆行驶的稳定性判据[J].机械工程学报,2015,51(10):103-111.
XIONG L,QU T,FENG Y,et al.Stability criterion for the vehicle under critical driving situation[J].Journal of Mechanical Engineering,2015,51(10):103-111.(In Chinese)
[3] 刘飞,熊璐,邓律华,等.基于相平面法的车辆行驶稳定性判定方法[J].华南理工大学学报(自然科学版),2014,42(11):63-70.
LIU F,XIONG L,DENG L H,et al.Judgment method of vehicle driving stability based on phase plane method [J].Journal of South China University of Technology(Natural Science Edition),2014,42(11): 63-70.(In Chinese)
[4] 罗玉涛,来恩铭.基于能量法的车辆稳定性判断研究[J].汽车工程,2014(12):1534-1538.
LUO Y T,LAI E M.A research on vehicle stability judgment based on energy method [J].Automotive Engineering,2014(12):1534-1538.(In Chinese)
[5] 石文,余卓平,熊璐.车辆临界稳定情况下相关状态变量变化对稳定性判定准则的影响[J].汽车工程,2014(12):1520-1527.
SHI W,YU Z P,XIONG L.The influence of state variables variation on vehicle stability criteria under critical stable condition[J].Automotive Engineering,2014(12):1520-1527.(In Chinese)
[6] VERSCHUREN R M A F.Analysis of the lateral dynamic behaviour of articulated commercial vehicles[J].Vehicle System Dynamics,2012,50(Sup1):169-189.
[7] SADRI S,WU C Q.Lateral stability analysis of onroad vehicles using Lyapunov's direct method[C]//Intelligent Vehicles Symposium.Alcala de Henares.Spain:IEEE,2012:821-826.
[8] SADRI S,WU C Q.Lateral stability analysis of onroad vehicles using the concept of Lyapunov exponents[C]//Intelligent Vehicles Symposium.Alcala de Henares,Spain:IEEE,2012:450-455.
[9] DANDACH H,MIRAS J D,CHARARA A.Approximation of the vehicle stability domain using interval analysis[C]//International IEEE Conference on Intelligent Transportation Systems. Hague,Netherlands:IEEE,2013:91-98.
[10]CHEN X X,ZENG S H.Vehicle roll stability analysis based on root locus[C]//International Conference on Intelligent Transportation,Big Data and Smart City.Halong Bay,Vietnam:IEEE,2015:977-980.
[11]SUN C,SONG S,LIU Z.Vehicle roll stability analysis considering lateralload transfer rate[C]//International Conference on Transportation Information and Safety.Wuhan:IEEE,2015:398-402.
[12]楊燕,张昭涛.基于阈值和蚁群算法结合的聚类方法[J].西南交通大学学报,2006,41(6):719-722.
YANG Y,ZHANG Z T.Clustering method combining threshold algorithm with antcolony algorithm[J].Journal of Southwest Jiaotong University,2006,41(6):719-722.(In Chinese)
- 能源集团ERP电厂标识系统KKS编码标准化分析
- 关于烟草行业的生产设备管理系统的设计
- 25HZ相敏轨道电路维修及故障处理
- 合理利用CPC,提高光敏器件领域检索效率
- 循环流化床锅炉烟气脱硫系统超低排放改造实践与探讨
- 民航客机起落架维修深析
- 电子通信技术发展对红外空空导弹地面测试影响问题研究
- 浅析湖南省湘西自治州永顺县灵溪镇黄桃开发布局与培管技术
- 国产民用飞机系统动态原理图软件设计与实现
- 浅谈水利工程施工技术
- 海洋石油钻井机械及工具现代技术研究
- 浅谈不等跨连续钢梁偏心吊装技术
- 蓝光扫描技术促进冲压件质量提升
- 抽油机的维修与保养措施探讨
- 工艺美术与时代相适应的发展路径探索
- 也谈文化因素对旅游消费的影响
- 新媒体时代下电视新闻编辑的创新举措
- 固定污染源废气中颗粒物监测及质控技术
- 提高柴油机燃料使用经济性的措施
- 变电运维一体化的风险控制分析
- 浅析机械设计制造及其自动化的工业发展前景
- 新时代人事档案管理制度与模式的创新探究
- 从公共服务视角谈新能源汽车产业创新发展
- 生态循环畜牧业的发展政策研究
- 大数据背景下企业财务会计向管理会计的转型
- dazzles
- dazzling
- dazzlingly
- dazzlings
- dba
- dbr
- d.c
- dc
- dcf
- d, d
- -dd-
- ddi
- ddp
- ddt
- ddt's
- ddts
- ddu
- de
- deacon
- deaconate
- deaconed
- deaconess
- deaconesses
- deaconhood
- deaconing
- 西金
- 西门
- 西门子
- 西门庆请武大郎
- 西门洒泪
- 西门溉其前,史起灌其后
- 西门行
- 西门豹
- 西门豹治邺
- 西门豹渠
- 西阳
- 西阶
- 西除东荡
- 西陵
- 西陵峡
- 西隐集
- 西隤
- 西雍
- 西非
- 西非国家的棒打节
- 西非国家经济共同体
- 西非日内瓦
- 西非经济共同体
- 西靡树
- 西面