赵燕 王江华

摘要:设计一种多用途陀螺式滚动旋翼遥感平台,该平台具有水、陆、空三栖行进能力,以适应各种复杂环境,在地震多发的当代社会,可代替救援人员进行现场侦测和实施救援。遥感平台以四旋翼飞行器为基础,将外框架设计为轻型滚轮式结构,使其既可以停留或滑行于水面又能以独轮直立平衡的方式实现陆地行驶,且其特有的独轮滚动行进方式可使其很容易进入一定的狭窄空间。实践证明,该遥感平台的平衡控制效果较理想。
关键词:四旋翼;救援;滚轮式;直立平衡
近年来,火灾,地震等自然灾害频发,人員搜救,物资投放,环境监测等各个方面都需要用到无人机。而三栖无人机是一种新兴无人机,打破了无人机只能在天上飞的固有模式,它能够实现在天上飞,在陆地上“滚动”,在水面“浮”的功能。
四轴无人机动力学原理较为简单,轮式结构的巧妙设计使得探测器能够前后滚动,可以进入狭窄空间进行工作,能适应各种复杂环境。三栖四轴无人机基于四轴无人机的优点,再外加其他的动力和控制模块,能够达到三栖行走目的,在其上搭载地形探测设备,即可辅助或代替救援人员实施救援。
1遥感平台概述
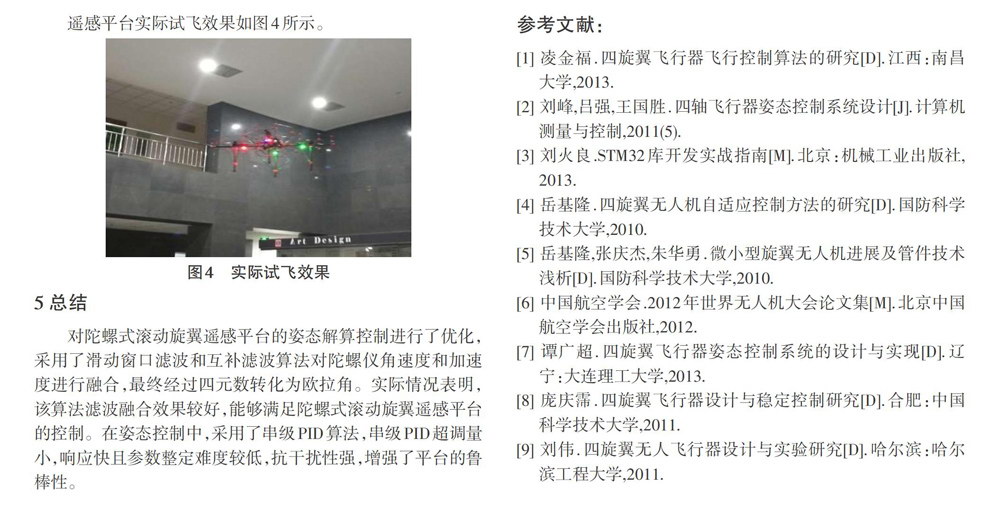
陀螺式滚动旋翼遥感平台由姿态检测模块、姿态控制模块和执行模块组成。通过对整机的软硬件测试表明,各模块均能按照预定的功能工作,能够实现平台的实时性稳定控制。对陀螺式滚动旋翼遥感平台进行了水、陆、空三栖行进实验。测验表明,控制算法能够有效地对陀螺式滚动旋翼遥感平台的姿态进行稳定性控制,完成三栖任务。
2平台硬件设计
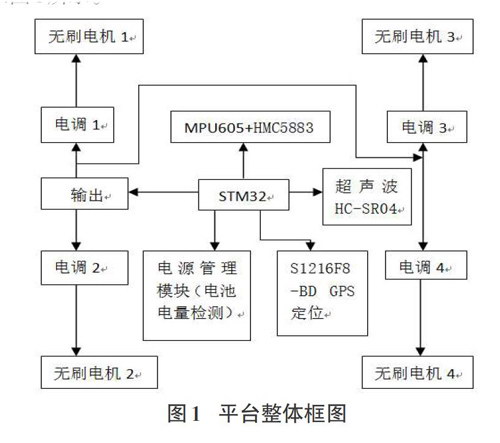
陀螺式滚动旋翼遥感平台采用以ARM Cortex-M4为内核的STM32F405 MCU为主控单元,姿态检测模块采用MPU6050+HMC5883L来完成对姿态的测量,平台的遥控控制采用大疆公司的2.4GHz遥控系统遥控器发射机DT7和接收机DRl6t31、电源模块采用AMSll7-3.3制作、超声波测距模块采用HC-SR04、GPS定位模块以S1216F8-BD为核心。平台整体框图如图1所示。
- 研究生联合培养基地(文峰中学)建设的策略研究
- 初中化学课后作业现状调查报告
- 应用信息技术引领农村初中数学教学变革
- “问题串”在初中数学章节统领课中的应用
- 语文教师课程能力构成要素
- 高中语文教学中中国传统文化的渗透
- 《简单结构的设计》教学策略研究
- 初中劳技开放性作业设计与布置探索
- 基于信息技术的地理差异教学情境创设策略
- 微课在初中物理教学中的应用探究
- 核心素养下初中道德与法治教学策略初探
- 核心素养下初中道德与法治高效课堂的构建
- 渐进式唤醒——构建初中数学真学课堂
- 分组教学在初中数学课堂教学中的应用
- 真实数学课堂教学实践的几点思考
- 初中数学教学中引导学生自主学习的对策
- 图形直观在“函数及其表示”中的呈现
- 项目驱动式教学中培养与激发学生学习动机的策略
- 中学体育教学渗透德育策略探究
- 探究“契约学习法”在初中体育教学中的应用
- 提升初中生学习篮球积极性的实践与探索
- 有效提高学校体育中考工作效率和学生成绩探讨
- 民间体育项目与大课间活动的有效整合
- 促使学生主动参与初中体育教学的策略
- 结合文化背景,提升古筝教学实效性
- multicolumn
- multicomponent
- multiconductor
- multiconic
- multicore
- multicorneal
- multicorporation
- multicorporations
- multicostate
- multicounty
- multicourse
- multicourses
- multicrystalline
- multicultural
- multi-cultural
- multiculturalism
- multiculturalisms
- multiculturalist
- multiculturalists
- multiculturally
- multicultural/multiracial
- multiculture
- multicultures
- multicurrencies
- multicurrency
- 求知的愿望很迫切
- 求知若渴
- 求知要循序渐进
- 求神不如求人
- 求神不如求己
- 求神拜佛
- 求神要烧香
- 求神问卜
- 求神问卜的一种巫术
- 求神除灾去秽
- 求神难于上天,犯神易如踏地
- 求福
- 求稳当
- 求童蒙
- 求端讯末
- 求策
- 求签
- 求粉饰于耳目易,求无愧于隐微难
- 求索
- 求索无厌
- 求索聚敛
- 求羊
- 求美
- 求而不得
- 求职