杨皓明 赵唯


摘要:两轮平衡车的状态变量多、系统模型非线性、变量间强耦合、时变性等不稳定,需要高效的控制算法和控制周期。本文采用串级PID控制系统配合互补滤波算法姿态解算,实时精确地控制无刷直流电机,以角速度环为最内环,角度环与速度环为外环实现了闭环控制。系统结果表明,基于串级PID控制的控制系统能够有效控制两轮自平衡车的运行。
关键词:两轮自平衡车; 控制算法;控制周期
中图分类号:TP311? ? ? 文献标识码:A
文章编号:1009-3044(2019)16-0288-02
开放科学(资源服务)标识码(OSID):
两轮平衡车是通过电机对左右两轮进行力矩输出保持平衡的类倒立摆系统,具有结构小巧、控制高效和转弯灵活等特点已经成为移动机器人的研究热点。对于自平衡车控制系统,已有不同的控制理论被提出,其中常用于实际应用的控制算法有常规PID控制、自适应控制、模糊控制等。采用串级PID控制系统配合互补滤波算法姿态解算,通过实时精确地控制无刷直流电机,以角速度环为最内环,角度环与速度环为外环实现了闭环控制。在实践赛道中表现出具有良好的动态特性,反应迅速。
1系统整体设计
本文要求能识别赛道方向信息,自主控制姿态,通过两轮驱动以直立姿态行驶在铺有电磁线的赛道上,并且同时在微控制器上采集到的各个传感器信息无线传输到PC上位机。系统设计整体架构如图1,微处理器选用飞思卡尔的MK6ODN512ZVLQ1O为控制中心,通过外接电磁传感器、MPU6050三轴姿态传感器、测速512线编码器来获取当前车体的方向、姿态、速度信息。通过微处理器运算后输出PWM控制信号给驱动模块驱动电机运转,同时通过NRF24L01無线传输模块发送信息到上位机进行监视。
2 两轮自平衡车硬件系统设计
自平衡车的硬件系统分为电源电路、运放模块、传感器电路模块、控制系统电路模块、滤波电路模块、电机驱动电路模块等。镍镉电池作为总电源,通过稳压电路为主控芯片、传感器提供稳定的直流电源,传感器用于检测平衡车的行驶状态,判断行驶条件,通过滤波电路,去除高频噪声,由控制电路进行信号处理,调整控制参数,制动控制隔离电路判断制动条件,对电机驱动电路进行控制的同时保护主控模块。
2.1 核心控制电路模块
(1)电源电路
本文采用7.2V镍镉电池,放置于车体的轴线以下,以降低车体的重心。考虑到车上其他模块的供电要求,需要稳压电路对电池电压进行处理。
K60芯片供电电压为3.3V,摄像头、液晶显示屏的供电电压为3.3V,制动控制隔离电路、陀螺仪供电电压为5V,电机驱动电路供电电压为12V和7.2V。
1)5V稳压电路
采用LM2940芯片,LM2940是低压差的线性稳压集成电路,芯片的输入输出之间的损耗比较小, 包括静态电流降低电路、电流限制、电池反接和反插入保护电路等。3脚接入输出端和地之间接入的滤波电容,减少杂波的输出。
2)3.3V外设稳压电路
采用AMS3117芯片, AMS1117内部集成过热保护和限流电路,固定输出电压3.3V,为确保输入和输出电压的稳定性,需要在AMS1117输入输出端并联滤波电容。
3)3.3V主控稳压电路
主控稳压电路采用AMS1117稳定输出固定电压3.3V,电路中需要大量的电源类引脚,电源与地包括很多引脚。电源与地引脚主要用于外接滤波电容,无须外接电源与地。IC内部不能制作电容,需要外接电容。为了改善系统的电磁兼容性,采用电源滤波电路降低电源波动对系统的影响,从而增强电路工作的稳定性。
4)DC-DC 12V稳压电路
将直流电压变换为另一种直流电压利用半导体或者电阻都会降低转换的效率,DC-DC转换电路具有更高的转换效率,其具有超低波纹系数和低静态电流,在电机驱动硬件系统中起到隔离的作用,避免大电流灌满电路,产生较强的波纹。
(2)运算放大电路
自平衡车判断道路性质状况需要通过电感采集电压值,但感应到的信号强度较小,因此需要进行运算放大,采用OPA4377芯片,其具有零漂移,低噪声等特点,在有效增强信号的同时引入较少的干扰。
(3)控制系统电路.
本文采用作为微控制器,作为整个系统的控制中心,把传感器(图像数据,编码器,陀螺仪等)采集的信号,在控制算法的决策下驱动电机完成控制平衡车。
2.2 电机驱动模块的设计
(1)电机驱动电路
采用PWM调压调节对无刷直流电机进行调速,根据能量冲量等效原理PWM通过将固定不变的电压系统电压转换成占空比可变的PWM波,占空比的改变会导致电机电枢两端的平均电压的方式的改变。优点主要有体积小、调速性能好、成本较低、方便控制,易于闭环的控制。
电机驱动采用全桥驱动桥驱动电路,由四个三极管或 MOS 管组成的驱动臂组成。电桥驱动芯片hip2408一方面控制对角线上MOS的导通,另一方面控制另一条对角线上的 MOS的断开从而使电机转动,通过改变每个臂上点MOS的状态从而实现电机的刹车和反向。
(2)制动控制隔离电路的设计
电机驱动的启动停止以及正反转需要专门的电路进行控制,系统计算获得的驱动信号通过制动控制隔离电路进行隔离,同时增强信号的功率,进行后续电平的匹配,确保可以正常驱动MOS管,同时利用隔离,将输入信号的IO口与电机驱动模块进行有效隔离,防止电机驱动时的电流回灌。
3 软件设计
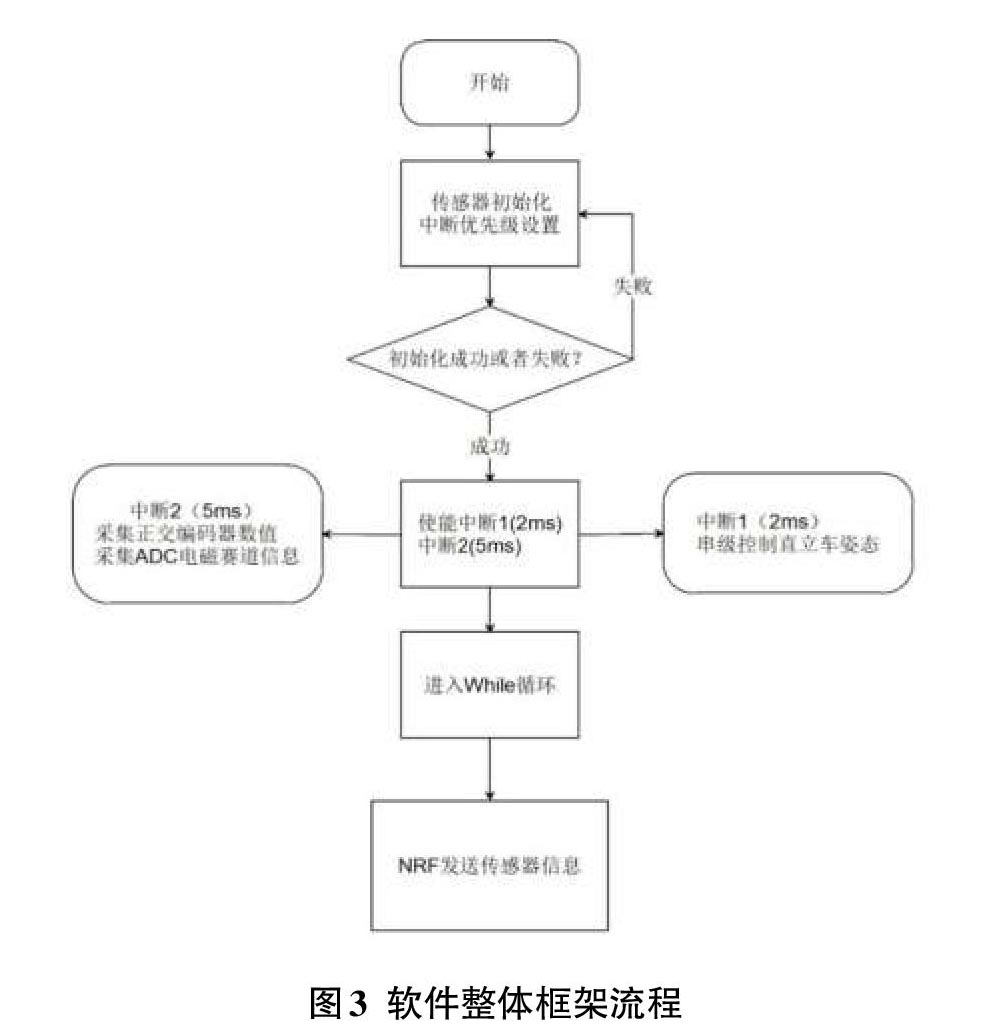
3.1软件总体设计框架
由于两轮平衡车是一种典型的倒立摆模型,根据平衡车的自平衡原理,当检测到传感器解算出的角度与预设机械零点角度不同即车体发生倾斜时,为保持车体平衡,需要电机发力驱动车向前或向后获得加速度,让重心移动来达到系统动态平衡。
在开通电源后,传感器必须进行初始化,从而保证传感器的工作正常。获取MPU6050的初始温漂进行清零,并配置软件中断优先级,分别配置中断1(姿态控制)2ms、中断2(速度、电磁赛道采集)5ms,将串级控制优先级置高来确保平衡车直立为第一优先级。软件整体框架流程如图3所示。
3.2互补滤波姿态解算
姿态解算的精确与动态性将影响控制是否高效,为此选用了一阶互补滤波作为姿态解算的方案。互补滤波算法有效地利用加速度计的时效性弥补了角速度的温漂问题。首先利用加速度传感器的Y轴和Z轴加速度用反三角函数解算出当前角度,但是由于加速度计容易获受尖峰的影响,所以需要对角速度进行积分获得当前角度,再对二者进行融合得到最终角度。由图可知互补滤波算法充分发挥了这两种传感器的优点,消除了加速度计的高频噪声和角速度的积分累计误差。与DMP读取方案相比,互补滤波算法动态性更高,对闭环控制有更好的帮助。
3.3串级闭环控制
直立车上的传感器反馈的变量有角速度、加速度、编码器速度三个量,通过构建串级PID控制系统,分别使用位置式PID和增量式PID来得到输出到驱动模块的PWM。由于串级的调试相比于普通PID有着更好的规律性,所以该控制系统比普通的方案能够更好更快地进行参数调制。并且出现问题现象后能够分析出是哪一环出的问题。设计并调试以角速度环为系统主回路的三闭环串级PID控制系统。
4 结论
本文研究串级PID控制系统配合互补滤波算法姿态解算,通过实时精确地控制无刷直流电机,以角速度环为最内环,角度环与速度环为外环实现了闭环控制。自平衡车的硬件系统分为电源电路、运放模块、传感器电路模块、控制系统电路模块、滤波电路模块、电机驱动电路模块。
参考文献:
[1] 潘二伟. 基于STM32的两轮自平衡车设计与实现 [D]. 黑龙江: 黑龙江大学,? 2018.
[2] 王磊, 宁欣. 基于STM32的两轮自平衡小车控制系统设计[J]. 山东工业技术, 2018, 267(13):60.
[3] 吴振磊, 叶金汉. 一种两轮自平衡车的控制模型分析与实现[J]. 轻工科技, 2018, 235(06):83-84.
[4] 王恒, 桑元俊. 基于新型惯性传感器的两轮自平衡车的设计[J]. 现代电子技术, 2017(18):57-62.
[5] 林伟捷, 黄唯佳, 蔡剑卿. 基于四元数互补滤波和PID控制算法的两轮自平衡车系统设计[J]. 软件导刊, 2016, 15(6).
[6] 陈鹏展, 朱年华, 李杰. 两轮自平衡车姿态检测与平衡控制[J]. 控制工程, 2017(8).
[7] 傅忠云, 朱海霞, 孙金秋. et al. 两轮载人自平衡车姿态测量单元设计[J]. 科学技术与工程, 2015, 15(15):66-71.
[8] 邊群星, 陈锟, 陈郑洲. 基于互补滤波器的两轮平衡车姿态角度测量[J]. 电子设计工程, 2014(18):55-58.
【通联编辑:光文玲】
- 试论国企人事管理绩效考核存在的问题与对策
- 新医改形势下公立医院人力资源管理工作分析
- 绩效考核在事业单位人力资源管理中的作用
- 铁路职工培训存在的问题和措施剖析
- 谈现代企业的人才培养
- 行政事业单位人力资源管理存在的问题及对策
- 科研事业单位绩效工资分配改革分析
- 城轨网络化运营背景下管理人才培养模式研究
- 平衡计分卡在企业绩效评价体系中的应用研究
- 浅谈国有企业绩效考核体系的构建与实施
- 探讨混合所有制背景下的企业用工制度合规性
- 浅析国有企业人力资源管理的有效途径
- 中小民营企业绩效管理之绩效考核探讨
- 企业绩效考核有效性研究
- 施工企业“蓝领”职工队伍建设探究
- 房地产经济对中国国民经济增长的作用研究
- 电子商务在煤炭销售行业存在的问题分析
- 探析生态经济视域下农业经济的发展路径
- 发挥农村经济管理部门在生态农业中的引导作用,整合生态农业
- 电子商务背景下中国红酒消费市场及企业营销渠道调查研究
- 木业港产园一体化模式研究
- 生态文明背景下六盘水市乡村经济振兴路径初探
- 浅谈农村商业银行发展面临的挑战与对策
- 关于利率市场化对银行理财产品定价影响的研究
- 浅谈民营企业融资存在的问题及对策
- snowmen
- snowplough
- snowploughed
- snowploughing
- snowploughs
- snowplow
- snows
- snowshoe
- snowshoed
- snowshoeing
- snowshoer
- snowshoers
- snowshoes
- snowstorm
- snowstorms
- snow-white
- snow white
- snowy
- snowyish
- snow²
- snow¹
- snr
- snub
- snubbed
- snubbing
- 哲储
- 哲兄
- 哲别
- 哲匠
- 哲嗣
- 哲士
- 哲夫
- 哲夫成城,哲妇倾城
- 哲妇
- 哲妇不嫁破亡之家,名贤不官灭绝之国
- 哲子
- 哲学
- 哲学上指一切事物的最初根源或构成世界的最根本实体
- 哲学之王
- 哲学史上伟大的革命变革
- 哲学基本问题
- 哲学基本问题和“两个对子”的关系
- 哲学家
- 哲学家诗人和诗人哲学家
- 哲学的狂想曲
- 哲学语义学
- 哲思
- 哲昆
- 哲母
- 哲王