黎耕 薛琪琪 张鹏兵 陈蕾

摘要:基于目前沙漠植被智能灌溉处于半空白状态,但是沙漠绿化和防沙治沙工作刻不容缓。沙漠植被在种植初期缺少及时合理的灌溉导致成活率低,种植的大量植被生长缓慢固沙作用不明显,我们立足于当前形势下,利用目前所拥有的智能技术结合农业灌溉知识,制作一款依靠太阳能发电、自动按时定量、合理、绿色环保、低人工干预的灌溉方式。并且采用靠近植物根系的节水灌溉方式,真正地做到节能与智能的完美结合。
关键词:智能小车;沙漠灌溉;传感器;环保
中图分类号:TP311 文献标识码:A
文章编号:1009-3044(2019)29-0256-03
2016年,蚂蚁森林上线,用户可以通过步行、网上缴费等其他行为降低碳排放,将被换算为“绿色能量”,“绿色能量”积累到一定量可以在网上种下一棵树。网络上的树长大之后,公益组织会在沙漠化严重的地方种一棵真树,鼓励用户的低碳行为同时达到保护环境的目的。2019年2月,盒马接入支付宝蚂蚁森林,在盒马门店购物不使用塑料袋即可获得绿色能量。据盒马预计,此举全年有望减少使用1277万只塑料袋,创造的绿色能量可种植约1.5万棵梭梭树。2019年4月22日,支付宝宣布蚂蚁森林用户数达5亿,5亿人共同在荒漠化地区种下1亿棵真树,种树总面积近140万亩。庞大数量的树苗灌溉是一个困难的问题,根据查阅资料,蚂蚁森林目前没有成型的灌溉体系,因而我们设计的这款小车是通过智能化控制解决植株灌溉问题。
1总体设计
1.1沙漠灌溉小车的机械结构
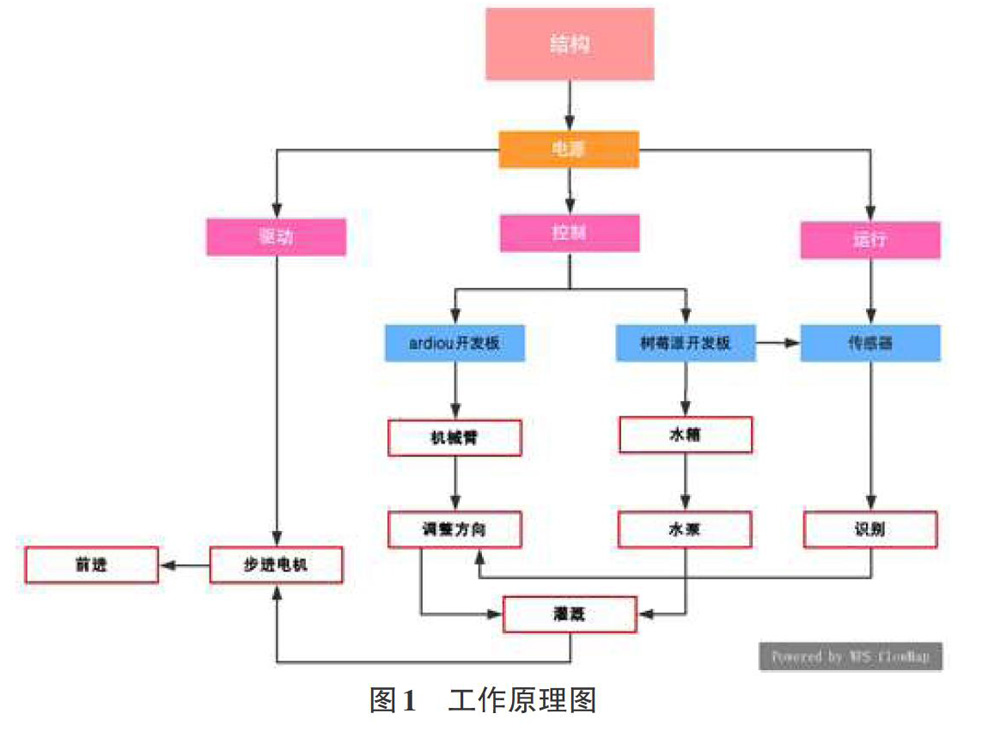
沙漠灌溉小车主要由机体结构、控制结构和运行结构三部分组成如图。机体结构由机械臂,履带底盘和步进电机构成的驱动部件组成。运行结构主要包括超声波传感器和颜色识别传感器。控制结构主要为太阳能电池板,arduino开发板和树莓派核心主板组成。
本方案产品坚持以“高效、便捷”的设计理念,采用全智能沙漠灌溉小车自动化为一体的控制方式,通过由履带和步进电机构成的驱动装置,外搭载超声波传感器,Flash-LiderF4激光雷达和GPS模块来实现多点导航。首先确定需要被灌溉植被的路径,再利用颜色识别传感器分辨出灌溉的植株。待灌溉目标明确后,将采用地下渗透的方式进行灌溉。在灌溉工作开始前,需要机械臂在被灌溉植被旁埋下一个可降解且色彩较鲜明的容器,选用此材质和颜色的原因有两点:一是可降解意味着对环境不会造成污染;二是色彩鲜明便于颜色识别传感器的辨识。每棵植株定量灌溉,达到预设灌溉量后,灌溉系统停止工作,转由驱动模块工作,小车前进,寻找下一棵需灌溉的植株。另外,在灌溉小车运行过程为减少车转身,小车将搭载一个机械臂来保证其运作机理的正常进行,进而完成灌溉工作。根据查阅资料获得蚂蚁森林种较为整齐,所以我们选用单排划片灌溉的方式。小车单次所载水量根据多次实验得出,使其在载水灌溉完之后尽可能地靠近基站,便于其再次载水。
1.2工作部件构成
1.2.1供电系统
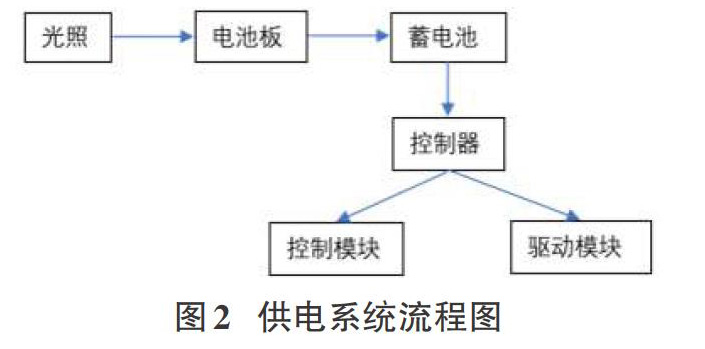
供电系统由一块12V320MA的光伏发电板,光合硅能12V7AH蓄电池和12V全自动充放电太阳能控制器组成。太阳能电池板其作用是将太阳的辐射能力转换成电能。控制器控制整个系统的工作状态,并对蓄电池起到充放电保护的作用。蓄电池为铅酸电池,具有将产生的电能储存的功能,人为控制选择释放时间。
1.2.2驱动部件
小车底座采用履带底座,以便于适应沙漠复杂地形。选用直流步进电机2个,提供双驱动,以获得足够的动力。直流步进电机选用电子开关器件,相较与传统电机它的优点是高保障性,工作时无转向电火花,较低的机械噪声等。
电机驱动模块选用L298N为控制芯片的模块,VSS可接4.5-7V电压。OUT 1,OUT 2之间接电机。输人控制电平由特定的引脚接入,控制电机的正反转。
履带底盘通过卷绕的履带支撑地面,与地面接触面积大,具有摩擦大,不易下陷等优点。
2支持灌溉小车的核心部件
2.1超声波传感器和FlashLiderF4激光雷达
通过无人机拍摄获取需灌溉区域地图。使用FlashLiderF4激光雷达进行绘建地图。树莓派运行环境为Ubuntu,indigo版POS,树莓派3。正常启动并让树莓派与PC正常通讯,树莓派修改hosts文件,并让树莓派获取PC端的IP与主机名。在建图前要对激光雷达F4与D1的坐标进行对齐。控制D1扫描地图。扫描完成后,保存地图。修改launch文件,引用保存好的地图。以第一棵树为起点,下一棵树为目标点,设置好目标点后,Dashgo会计算路径,自动控制小车移向目标点。超声波传感器负责路径上的简单避障。超声波传感器先发送一个信号,信号行进途中遇障碍后会反弹回来,再被超声波传感器接收,高电平持续时间为传感器信号发送到接受的时间,所以测试的距离=(高电平时间*声速)/2,再将距离换算成厘米(所用函数:dis-tance=pulsenlnf接收信号的引脚echo,HIGH)/58;声速为340m/s)。
2.2pixy颜色识别及处理
Pixy使用的是基于色调过滤算法来识别物体,因而植株旁储水容器选用色彩鲜亮的颜色。实现过程:首先给pixy供电,pixy的LED灯会规律的闪烁几下。然后按住pixy顶部按钮,约1秒钟,LED会变亮,会按白色到红色再到其他颜色的顺序变化,在LED灯变为红色时放松按钮,pixy会进入lightpipe模式,LED的颜色就是pixy摄像头所看到的图像中间的部分。通过pixy返回的值定位所植株旁储水容器,带动机械臂转动水泵工作,完成注水。
2.3树莓派核心主板
小车的主控模块选用树莓派。树莓派运行基于Linux的开源系统。树莓派3代B型,性能相对于一般的嵌入式系统都较为强大。树莓派有丰富的外部I/O口,结合树莓派的I/O口Py-thon库(GPIO库),可以满足发烧友各种奇妙设计的需求。基于树莓派的上述特点,本系统将其作为远程控制沙漠灌溉小车的主控模块。
2.4arduino开发板
选用arduino开发板作为机械臂的控制主板,其原因是该开发板的IDE是免费,开源的,具有13个数字10接口(D10数字输入输出口),输出PWM接口6个,AUTO接口可用做模拟输出口使用。库函数种类繁多,选用JAVA开发的编程环境作为开发环境。机械臂选用3个数字舵机调节方向和高度,第一个控制方向,第二个控制高度,第三个搭载于最前端,用于在识别到植株后更进一步的调节。机械臂上连接有从水箱中引出的水管,位置调节完成后,完成灌溉。
2.5小车灌溉系统
小车搭载一个储水水箱,内置汲水水泵和水位传感器。水位传感器监测水箱内水位。小车识别到植株停好后,pixy颜色识别传感器提供一个脉冲,树莓派主板识别处理后,控制水泵工作,因为我们提前设置好每次的灌溉量,因而当灌溉一定水量后,停止出水。系统关闭,执行下一前进工作指令。
2.6植株旁储水容器
容器形状如图,选用沙漏型一方面是为了注水方便,且下部分便于储水,最底部开若干小孔,采用低渗的方式实现根部灌溉,节约水资源的同时还能避免沙土结痂,块化。颜色选用设定的明亮色,便于颜色传感器识别。材质用可降解材料,在结束灌溉工作后,自我降解,防止污染还能作为植株生长肥料二次利用。
3成果展示
通过系统组装,成品如上图所示,履带底座确保复杂地形小车可以行走,太阳能电池板、控制器和蓄电池构成供电系统。树莓派控制小车的行驶,arduino开发板控制机械臂的动作和汲水水泵工作实现灌溉功能。模拟沙漠环境,多次实验,小车在不同环境下工作正常,能够完成实验预设功能,因此该实验具有可行性。
4结尾
在如今主流社会的趋势下,环境问题与经济社会的矛盾逐渐激化,经济高速發展的同时,一定程度地影响了自然环境。因而发展两者兼顾的共存模式是势在必行的。蚂蚁森林的出现极大地改善了我国西北环境,但恶劣环境使植株的生长面临严峻的挑战。因而实行智能高效的科学灌溉是尤为重要的。科学灌溉能够使泥土中各类元素的状态保持一种稳定的状态,其特点是省水,省工等。近年来,人口数量的快速增加,环境所面临的压力越来越大,水资源的问题日益显现,节水灌溉成为必然趋势。可持续发展需要每个人参与其中。
- 浅析教师参训倦怠症产生的原因及应对策略
- 完善标准化养老护理体系研究
- 气体超声波流量计换能器性能下降对天然气计量的影响分析
- 河北省村镇银行支农效果调查研究
- 石油化工装置管道施工监理职责和监理措施
- 电力客户受电工程市场开放中的问题与解决思路
- 大学生经管类实验课程模式与学科竞赛成果关系研究
- 网络时代提升高校思想政治教育实效性的途径
- 高职学生党员组织认同的提升策略研究
- 基础与创新研究在风电人才培养中的作用探析
- 创新高校教育管理 培养创新型社会人才
- 中国共产党能够长期执政的理论逻辑与实践途径研究
- 浅论我国社会团体的发展现状
- 大学生心理健康教育课程中灵性教育的渗透与融合
- 浅谈对于家政服务管理与社区服务管理相互融合的看法
- “文创”与高校社团融合发展实践研究
- 高校数字化校园建设意义
- 融合移动学习的证券投资学教学新模式研究
- 构建高职院校学生党员教育管理体系的研究
- 中职教育汽车运用与维修专业课程改革实践与思考
- 城市燃气管网安全隐患分析与防范
- 技能大赛视域下“软件测试”课程教改研究
- 新时代加强高职院校意识形态工作思考
- 基于复杂网络理论的城市轨道交通网络可靠性分析研究综述
- 信息技术与财会实训课程教学深度融合创新发展研究
- unassiduousnesses
- unassimilating
- unassistant
- unassisting
- unassociable
- unassoiled
- unassorted
- unassuaging
- unassumed
- unassuming
- unassumingly
- unassumingness
- unassumingnesses
- unassuredly
- unassuredness
- unassurednesses
- unassuring
- unasthmatic
- unastonished
- unathletic
- unathletically
- unatmospheric
- unatmospherically
- unatonable
- unatoned
- 探问疾病
- 探问询问
- 探险
- 探雀
- 探颐索隐
- 探颔得珠
- 探题
- 探风
- 探风声
- 探马
- 探马赤军
- 探骊
- 探骊得珠
- 探骊获珠
- 探骑
- 探鱼
- 探黑丸
- 探黑白
- 探龙颔
- 掣
- 掣制
- 掣动青藤带动叶
- 掣动青藤带动瓜
- 掣取
- 掣后腿