刘佳刚 吴艳阳 张立先
摘要:在Matlab/SimMechanics工具箱中,根据串联机器人关节的运动链特征,建立了串联机器人模型,在常用工作空间求解方法的基础上,提出了基于SimMechanics求解工作空间的一种方法。通过关节角度等步长转动约束,求解机器人末端的位置,通过多次包络形成包络线和包络面,经过数据的后处理和可视化,形成机器人的工作空间轮廓,该方法取点效率高、误差小,可减少工作空间求解过程的时间,为提高机器人加工效率提供了理论依据,为机器人运动学进一步研究奠定了基础。
关键词:SimMechanics;串联机器人;约束;包络;工作空间
中图分类号:TP391.9
文献标志码:A
文章编号:1006-8228(2017)01-05-04
0.引言
工业机器人是一种可通过编程完成某些操作或移动作业的自动化装备,具有高度柔性和开放性工业机器人集成现代化制造系统,极大提高了制造业自动化水平。随着空间探索及应用的深入,空间机器人将扮演越来越重要的角色。在空间机器人的设计、规划及控制过程中,工作空间都是一个需要考虑的重要问题,它是衡量机器人工作能力的一个重要的运动学指标。
目前,对于六自由度工业机器人工作空间的求解方法,主要有解析法、数值法、几何法和Matlab仿真法。解析法是指,通过代数方法得到精确描述机器人末端位姿的解析方程,有两种得到解析方程的途径,一种是根据包络理论确定工作空间的界限曲面,另一种是通过求解机器人的奇异曲面来确定工作空间的界限曲面。数值法是以极值理论和优化方法为基础的,首先计算机器人工作空间边界曲面上的特征点,用这些点构成机器人的边界曲线,用这些边界曲线构成的面表示机器人的边界曲面。图解法是指利用几何作图的方式,对机器人的操作机构按工作空间定义来求解,所得到的工作空间往往是工作空间的各类剖截面或剖截线。Maflab仿真法是利用Maflab软件的机器人工具箱(Robotic Toolbox)对机器人进行建模和仿真求解机器人末端的工作空间。Matlab,SimMechanics仿真法使用正弦信号驱动机器人关节,来求解机器人末端的工作空间。
本文提出了一种基于SimMechanics的方法求解串联机器人工作空间,根据机器人关节运动链特征,等角度步长约束关节转动,获取机器人末端点的位置,然后通过包络法,快速地求解出工作空问的包络线或包络面,最终可近似得到机器人末端的工作空问。
1.工业机器人的运动学分析
六自由度串联工业机器人机构具有六个旋转自由度,前三个自由度用来确定位置,后三个自由度用来确定姿态。机器人末端的位姿通过D-H方法建立相邻两关节之间的空间转换关系,用一个四阶变换矩阵表示末端的手爪坐标系相对于基坐标系的齐次变换矩阵,建立操作臂末端的运动学方程。
2.工作空间的求解方法
工业机器人工作空间指机器人运动时手腕参考点或工具安装点能够到达的空间位置的集合。串联工业机器人工作空间求解流程图如图1所示。
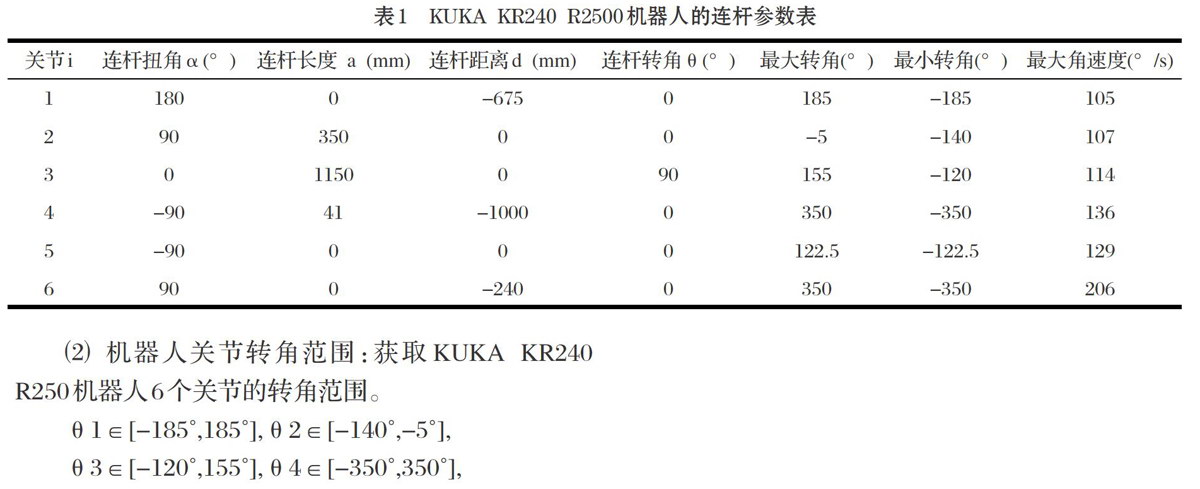
本文以六自由度工业机器人KUKA KR240 R2500为研究对象,机器人KUKA KR240 R2500的三维模型如图2所示。
KUKA KR240 R250机器人的工作空间求解过程如下。
(1)机器人关节运动链特征:KUKA KR240 R250机器人是6个旋转关节类型机器人。
(2)机器人关节转角范围:获取KUKA KR240R250机器人6个关节的转角范围。
3.机器人在Matlab中建模并仿真
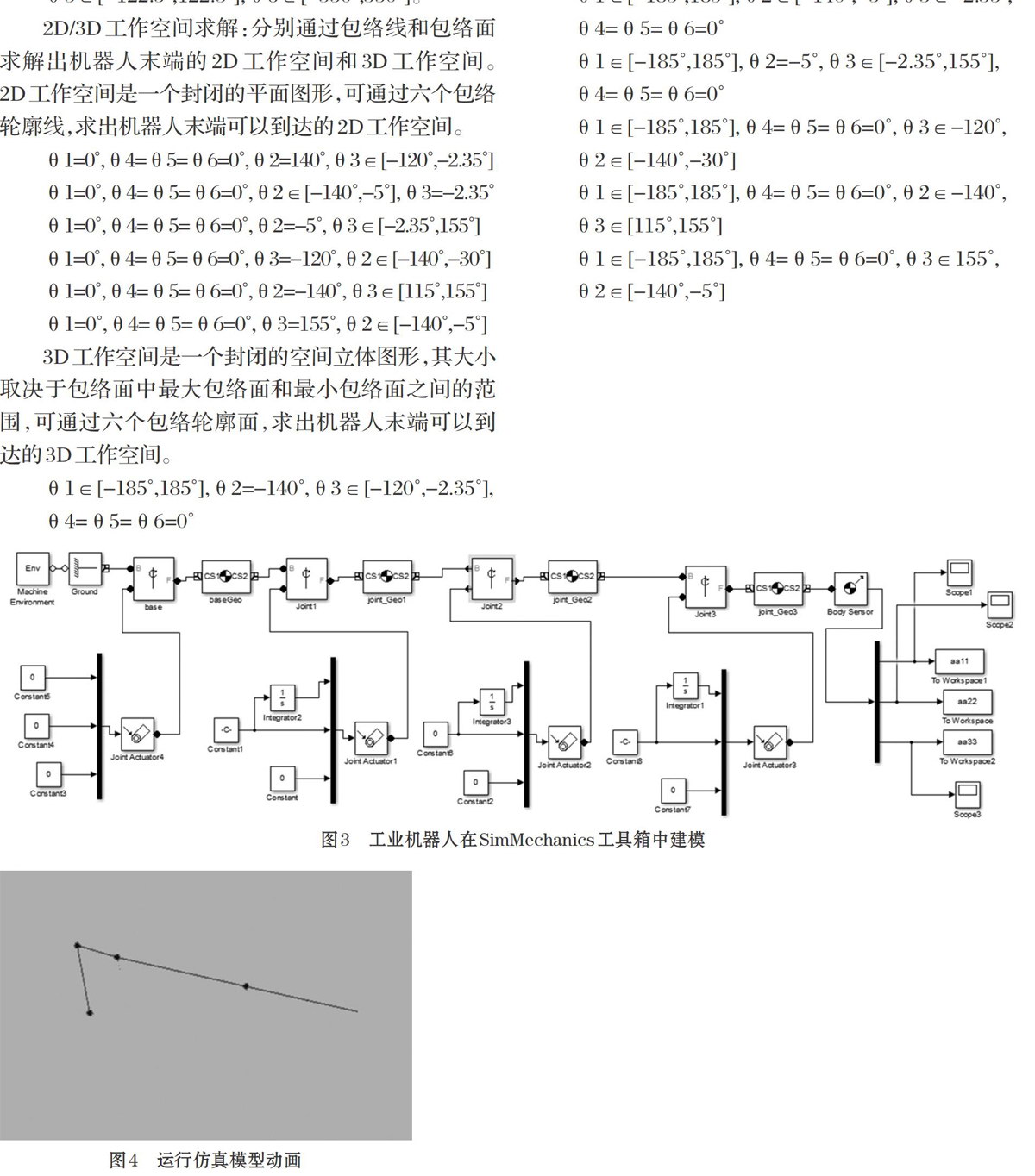
在Maflab软件中的Simulink/SimMechanics工具箱中,对六自由度串联工业机器人前三个关节和连杆进行建模并仿真。在SimMechanics工具箱中,根据机器^KUKA KR240 R250运动链,对机器人的base、joint]、joint2和joint3四个关节和连杆进行建模如图3所示。
对Body模块进行连杆参数配置,对Revolute模块进行关节旋转轴设置,对Joint Actuator模块进行驱动项设置,对Body Sensor模块配置为检测连杆末端参考世界坐标系的位置。驱动信号配置为运动,Constant和Integrate模块设置为角度信号、角速度信号和角加速度信号来驱动机器人关节转动,Scope模块显示机器人末端的位置信息,To Workspace模块输出机器人末端的位置信息到工作区中。
角加速度的值设置为Orad,保证机器人关节转动的角速度不变;角速度根据该关节在一个包络过程中转动的角度来设定一个定值,保证角度等步长改变;角度值设定为关节转角范围内某一个初值。这样就可以产生等角度步长的点位,仿真时间设定为30秒,解算器选择固定步长类型的二阶常微分方程(改进的欧拉法ode2),该解算器产生的点位误差较小,时间步长0.01秒,这时,在一次包络中将会产生3000个点位。工业机器人基座和前三关节建模完成后,进行模型运动仿真,机器人模型的运动仿真动画如图4所示。
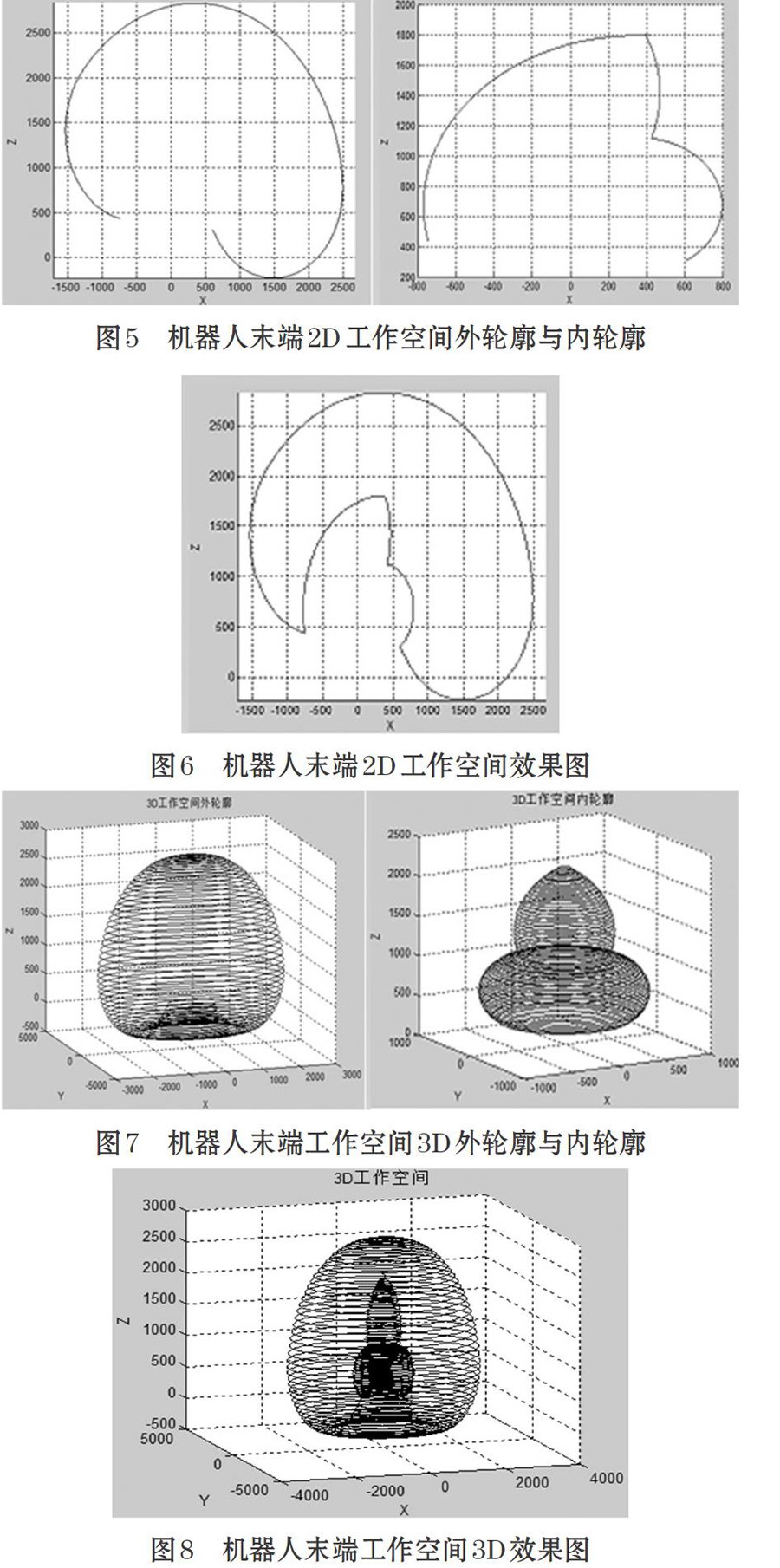
根据机器人2D工作空间求解步骤,六条包络线描述了2D工作空间的外轮廓线和内轮廓线如图5所示。
内外轮廓线之间的范围构成机器人末端2D工作空间如图6所示。
根据机器人3D工作空间求解步骤,六个包络面描述了机器人末端3D工作空间的外轮廓面和内轮廓面如图7所示。
机器人末端的3D工作空间大小取決于最大包络面和最小包络面之间的范围,机器人末端3D工作空间如图8所示。
从图6和图8可以看出,得到的包络曲线和包络曲面近似机器人末端工作空间,因此,当关节角度变化时的等步长足够小,形成的末端点位均匀且足够多时,就可以达到工作空间边界的精度要求。因此,利用SimMechanics对工业机器人建模,通过生成多条包络线和多个包络面,然后由这些包络线和包络面构成机器人末端工作空间轮廓,近似表示出机器人末端所能达到的点位边界,进而求解出机器人末端的工作空间。
4.小结
本文利用Matlab软件中SimMechanics库的功能,根据六自由度工业机器人的关节之间的运动链关系,在SimMechanics库中对工业机器人进行建模,在工业机器人各关节的转角范围内,对模型中相应关节施加角度等步长驱动信号,驱动机器人关节的转动,通过传感器获取机器人末端点的坐标位置,得出末端点的点云数据,然后对点云进行可视化,得到工业机器人的工作空间轮廓。该方法适用于串联工业机器人,能够快速精确求解机器人末端的工作空间,为机器人加工过程中工件的定位和机器人奇异位形的分析提供了理论依据,此研究之后,可以在机器人工作空间中,设计工件装夹算法以避免奇异位形,提高机器^的加工效率。
- 基于符号学探究环境艺术设计的象征性
- 阿瑟·丹托艺术思想对当代美术创作价值取向的影响
- 基于视觉传达视域的新中国宣传画选题及特点研究
- 秦淮灯彩技艺传承装置设计研究
- 南京明城墙的文创设计方法
- 公共空间下特色小镇导视系统设计
- 李调元戏曲创作虚实观初探
- 第五届“华师科技园杯”(2019年9月)优秀学术论文评选结果
- 浅谈灵璧石文化发展史上的三次采石高峰
- 电视播音主持副语言创作功能与规律
- 浅谈如何提升群文活动质量
- 简析如何加强群众文化品牌的建设
- 议国外幸福理论文化研究
- 反“沉默的螺旋”理论下明星经纪人对网络舆情的把控
- 银川市广场群众音乐文化的社会功能研究初探
- 自媒体传播浅谈
- 无产阶级文学的产生与影响
- 中国古代饮食礼仪的思想内涵及当代价值
- 礼仪商演主持发展战略研究
- 浅析傩文化的发展演变与传承保护
- 浅析公共图书馆流动服务车的实践应用
- 跨性别交际中的礼仪冲突分析
- 江西声乐类非物质文化遗产传承工作面临的困境及对策研究
- 论电台播音对新闻稿件的重塑与创造
- 中德熟语中常见动物喻义对比分析
- wrongs
- wrong time
- wrong track
- wrong way
- wrong way around
- wrong-wise
- wrong with
- wrong²
- wrong³
- wrong¹
- wrong⁴
- wrote
- wrought-iron
- wrought iron
- wrought irons
- wrt
- wrung
- wry
- wryer
- wryest
- wrying
- wryly
- wry-necked
- wryness
- wrynesses
- 侵陷
- 侵食
- 侵黑
- 侷
- 侷狭
- 侹
- 侹侹
- 侹在床上
- 侻
- 侻陋
- 便
- 便中
- 便习
- 便了
- 便事
- 便于
- 便于携带
- 便于携带的宝物
- 便于携带的财物
- 便于用手托的盘
- 便会
- 便体
- 便作
- 便佞
- 便便