谢恩德 洪毅
摘要:基于位置的服务应用已经包含了人们生活的方方面面,这也使得人们对位置信息的需求越来越大。在室外我们可以依赖美国GPS和中国北斗等来获取精确的位置信息,但在复杂的室内环境中,由于卫星信号的极速衰减,无法提供满足人们要求的室内位置信息,同时没有普适性的室内定位解决方案,室内定位仍是研究热点。文章简单介绍什么是定位,然后对室内定位算法和定位介质进行了分类和简单介绍,最后对不同定位介质从不同方面进行了比较并指出了当前室内定位方案存在的问题。
关键词:基于位置服务;室内定位;定位算法;定位介质
中图分类号:TP3? ?文献标识码:A
文章编号:1009-3044(2021)11-0231-04
A Survey of Indoor Positioning Methods
XIE En-de, HONG Yi
(Faculty of Computers, Guangdong University of Technology, Guangzhou 510006, China)
Abstract: Location-based service applications have already included all aspects of people's lives, which makes people's demand for location information more and more. In the outdoor environment, we can rely on GPS and Bei-dou to obtain accurate location information. However, in the complex indoor environment, due to the rapid attenuation of satellite signals, indoor location information that meets people's requirements cannot be provided. Meanwhile, there is no universal indoor location solution, so indoor location is still a research hotspot. Article introduces what is the location, and then to indoor localization algorithm and positioning media has carried on the classification and simple introduction, and finally compares the different positioning media from different aspects and points out the problems existing in the current indoor positioning scheme.
Key words: location-based services; indoor positioning; location algorithm; locating medium
在过去的几十年间,以美国的全球定位系统(Global Positioning System,GPS)为代表的全球导航卫星系统(Global Navigation Satellite System,GNSS)给人们的日常生活以及思维方式带来了巨大的变化,它是现代社会一个重要的技术里程碑。在此基础上,基于位置的服务(Location -based Services,LBS)也受到越来越多人的关注,从地图导航到社交网络,位置服务都在其中发挥重要作用。
随着物联网和移动计算的迅速发展,人们对位置服务需求不再局限于室外,室内也有定位及导航需求。之所以需要室内定位,一方面是人类在室内环境中同样有方位和导航需求,另一方面智慧物流,智慧工厂,无人超市等对位置信息的需求。然而,由于非視距通信问题,室内场景受到建筑物遮挡,卫星信号衰减迅速,GPS无法在室内条件下提供可靠的位置数据。所以,室内定位技术研究成为学术研究与行业应用的热点。
1 定位算法
定位简单来说就是根据已知节点(AP)的位置信息,利用已知节点与未知节点(MS)间存在的关系如距离,来估算MS的位置信息。定位的内在逻辑可以用如下等式表示:
定位方法=定位介质+定位算法? ? ? ? ? ? ? ? ? ? ? (1)
在等式(1)中定位介质是多样的,可以是声波[1,2],光学[3,4],无线信号[5,6],地磁场[7]等;定位算法可以分为基于测距和非测距的。基于测距的有到达时间(Time Of Arrive,TOA)、到达时间差(Time Difference Of Arrive,TDOA)、到达角度(Angle Of Arrive,AOA)、信号强度指示(Received Signal Strength Indication,RSSI)。基于非测距的是指纹定位(Fingerprint,FP)。
1.1 基于测距的定位算法
1.1.1 TOA定位算法
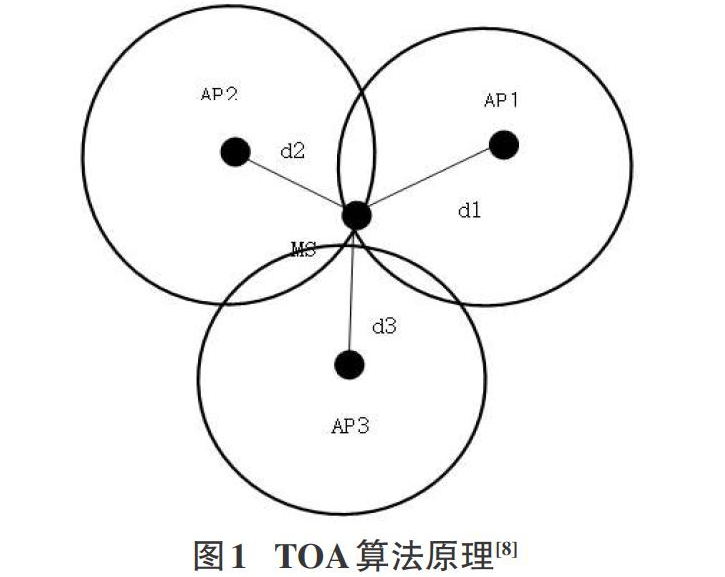
在TOA到达时间定位算法中AP是信号的发射端,MS是信号的接收端,信号的传播速度为v,从AP到达MS所用时间记为t,则两者之间的距离d=v*t。原理如图1所示。TOA算法需要接收端和发送端保持时间上的同步,在时间精确同步基础上,定位精度可以达到厘米级。
1.1.2 TDOA定位算法
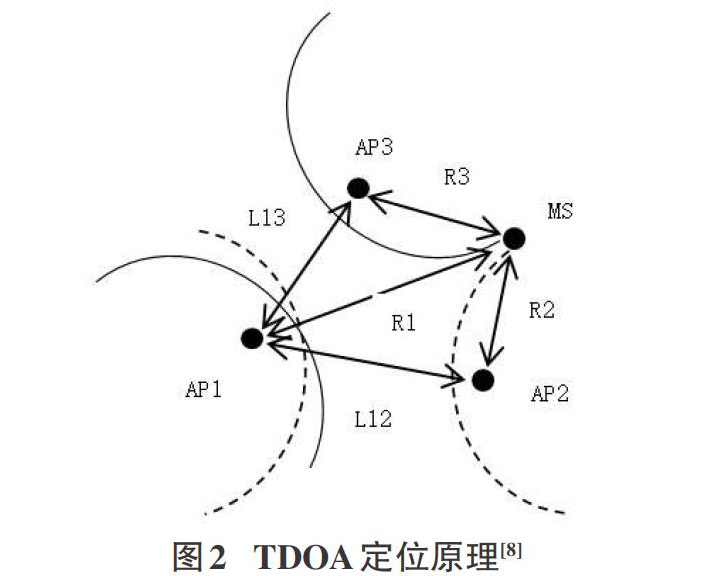
TDOA算法需要发送端保持时间同步即可,它利用MS接收到的两个不同AP1,AP2的信号到达时间差,计算出MS到AP1和AP2的距离差为L12,则MS就在以这AP1,AP2为焦点的双曲线上,再测得MS到AP1,AP3的距离差为L13,则MS就在这两个双曲线的交点上,原理如图2所示。
1.1.3 AOA定位算法
AOA达到角度算法,AP作为信号接收端架设有天线阵列, MS作为信号发送端,MS发射的信号被AP的天线阵列接收,AP从而获取到入射角度。两个接受端的入射角度射线的交点,即为MS位置。原理如图3所示。
1.1.4 RSSI测距定位算法
根据无线信号空间传播的路径损耗效应构建路径损耗模型[9]如式(2):
[RSSId=RSSId0-10*n*lgdd0+X]? ? (2)
式(2)中RSSI(d)表示收发端距离为d时接收端的RSSI值,单位dB;RSSI(d0)表示收发端近距离时(一般d0=1m)的RSSI值,由实际测得;n表示路径损耗系数,它依赖周围环境和建筑物类型,一般取2-4;X表示噪声干扰,它符合N(0,d[2])的正态分布,d的取值一般在3.0dB-14.1dB之间变化。根据模型可以计算出接收端和发送端的距离d。不同发送端到同一接收端距离不同,然后依据多边定位或质心定位计算出MS位置坐标。
1.2 指纹定位
无线信号易受周围环境(式(2)中n)影响及存在路径效应问题(式(2)中X)导致RSSI测距定位精度不高,所以基于无线信号的室内定位比较经典常用的算法就是指纹定位。
指纹定位包含两个阶段:离线建库和在线定位[10]。在离线建库阶段,首先将定位区域进行划分,划分为一个个的小正方形,划分完毕之后,构建坐标系,为每一个小正方形定好坐标,之后采集每个小正方形区域内的RSSI值,采集完所有正方形之后构建指纹数据库,数据库中的每一项是一个由坐标和RSSI构成的二元组即指纹<坐标,RSSI>;在线定位阶段,获取到待测点处RSSI值,与数据库中指纹作对比,找出与待测点处RSSI值差值最小点,输出其对应坐标作为待测点处坐标。具体如图4所示。
指纹定位的精度取决于指纹库的精准度,采集的指纹越精细,定位越精准,但同时也需要花费大量时间和精力,为了平衡成本和定位精度,在指纹库构建时可以采用群智感知或虚拟指纹方法来解决。清华大学的吴陈沭利用移动群智感知机制[11],提出了无人工现场勘测的无线信号指纹地图构建技术;He等人[12]基于已知节点的RSSI信息,通过对数路径损耗模型来对虚拟参考点处的 RSSI 值进行估计,得到该参考点处的虚拟指纹,从而构造指纹数据库。
在线定位阶段直接使用指纹库进行在线匹配,工作量大,计算时间长,所以为了减少计算量,需要用聚类算法对指纹库进行划分,划分指纹库的聚类算法有用 K-means[13]、模糊C均值[14]等。
2 定位介质
2.1 基于光学的室内定位
2.1.1红外线室内定位
红外线是频率介于微波和可见光之间的电磁波,具有良好的方向性。常用的定位算法是TOA。
具有代表性的携带红外标签的红外定位系统是由Want等人[15]提出的Active Badge系统,在该定位系统中待定位的人员需携带一个红外标签,红外标签每隔10秒钟会发射一个特定的红外编码,红外传感网络收到编码后,交由与红外传感网络的计算机处理,处理完成后得到标签的位置信息。该系统中带定位人员需要携带专门的红外标签,信息定时发送对人员的位置隐私性保护不足,且该系统需要在视距环境下才具有良好定位效果。
红外线只能进行视距传播且穿透性能差,同时易受其他光源(如太阳光)影响,所以红外定位更适合的是应用于机器人定位系统,毛玲等人[3]利用六对红外收发传感器组成小型定位系统,结合粒子滤波算法,实现了小型机器人的自定位,定位最大标准差为7.4mm。
2.1.2 可见光室内定位
可见光室内定位是利用可见光通信来实现的。可见光通信(Visible Light Communication,VLC)指利用可見光波段的光作为信息载体,利用可见光的高速明暗闪烁来传递信息,在空气中直接传输光信号的通信方式。与荧光灯和白炽灯相比,LED可以支持更高频率的明暗变换,所以在可见光室内定位中LED成为光源首选。
Zhang等人[16]提出的基于VLC的室内定位,利用收发节点的RSSI不同,得到收发节点之间的距离,然后使用最小二乘法计算得到待测点的位置,在信道竞争问题上不再使用时分多址的方式,而是使用BFSA(basic-frame slotted ALOHA)实现不同LED的信道竞争问题,但是文中表明限于视距传播的情况,仿真结果表明定位准确率超过95%,定位误差为5.9cm。
对于边界定位误差较大问题, Zheng等人[17]针对二维平面中基于VLC定位时边界误差较大问题提出误差校正算法来提高边界处的定位精度,并进一步实现了在三维空间中的定位,对于不同LED光源采用不同频率的LED作为光源利用Hamming窗作为过滤器来进行区分,解决了信道竞争问题。实验结果表明,边界的定位误差在3.67cm到1.56cm之间,在三维空间中平均定位误差为3cm。
可见光室内定位不受无线电波的干扰,定位整体精度高,但仍是视距传播,易受其他光源影响,存在信道竞争问题,同时需要改造LED光源,增加成本。
2.2 基于声波的室内定位
2.2.1超声波室内定位
因为声音的传播速度远小于电磁和光线的传播速度,所以对于声音在收发端的传播时间可以测量得更加精确。基于超声波的室内定位算法通常是TOA和TDOA。
早期应用超声波进行定位的是Active Bat系统[18]。在Bat系统中,用户携带一个可以发射超声的标签,当中央控制器收到无线射频信号时,接收端开始计时,发射端发射超声波,接收端收到超声波信号后停止计时,利用TOA算法计算出发射端的位置,作者声称系统的定位精度接近3cm。
超声波室内定位的整体精度高,可以达到厘米级,且系统结构相对简单,但是需要部署收发超声的设备,增加成本,超声波随着距离增加衰减很快所以不适用与大型场合。
2.3无线电波通信技术的室内定位
2.3.1 Wi-Fi室内定位
Wi-Fi是一个创建于IEEE802.11标准的无线局域网技术。室内Wi-Fi网络不仅可以作为一般的网络基础设施,还可以利用它进行室内定位。常用的定位算法是RSSI测距定位算法和指纹定位。
罗宇峰等人[19]考虑到Wi-Fi信号发送端部署高度对定位精度影响,利用几何方法对垂直高度进行消除,得到Wi-Fi发射端和接收端的水平距离,从而提出基于RSSI测距和消除高度影响的加权质心法较传统定位算法有巨大优越性。
杨帆等人[20]考虑到不同时间段Wi-Fi信号强弱不同,对定位带来误差,设定RSSI标准差的阈值,把信号的波动降到最低,得到处理后的信号的均值,设计并实现基于Android平台的Wi-Fi定位。
Wi-Fi总定位精度较高,硬件成本低(不用额外部署其他硬件),传输速率高,可以实现复杂的大范围定位、追踪任务,适用于工厂、商场等场合,但功耗较大,如果用指纹定位,指纹库的建立、维护和更新问题待解决,同时也会增加成本。
2.3.2 RFID室内定位
RFID是一种通过交变磁场或电磁场耦合的无线通信方式,根据信号强度变化来进行室内定位。根据标签是否带有电池可以分为主动定位和被动定位。常用定位算法有RSSI测距算法[21]和指纹定位[22]。
对于RSSI测距算法陈龙鹏等人[21]提出一种基于双神经网络RFID室内定位算法,利用双神经网络克服当前环境下的路径损耗系数n对定位的影响,提高了系统鲁棒性。
RFID传输速率较高,安全性好且不受非视距通信问题困扰,但是要部署大量RFID设备,同时定位人员需要持有标签,成本高,功耗大。
2.3.3 蓝牙室内定位
蓝牙室内定位利用室内安装好的位置信息已知的若干个蓝牙局域网接入点(如iBeacon基站),对每一个新加入的MS,通过获取MS处iBeacon基站[24]的RSSI值,利用RSSI测距算法或指纹定位获取MS的位置信息。
蓝牙信号易受环境干扰,尤其是人的活动影响。王乐等人[23]将人员活动引起的信号强度变化带来的测距误差视为异常误差,提出四种不同抗差算法,实验结果表明,抗差算法对蓝牙室内定位的精度有一定的改善。
蓝牙体积小、功耗低且易集成到手机等移动设备中;但需要部署蓝牙局域网网络接入点所以成本较高,易受电磁干扰,稳定性较差。
2.3.4 ZigBee室内定位
ZigBee室内定位[25,26]技术通过待测点和若干参考点与网关之间组网,待测点广播信息,采集各相邻参考点数据,待测点能够通过参考点所对应的RSSI值上传到定位引擎中,并且利用定位引擎确定待测点位置。
ZigBee室内定位安全性高,功耗相对较低,但对算法的要求较高。
2.3.5 UWB室内定位
UWB技术是目前备受关注的一种新型短距离高速率无线通信技术。基于UWB的室内定位算法有TOA、TDOA、AOA[27,28]。由于特殊的信号类型及频谱相对于其他无线电波信号,UWB信号在复杂室内环境下不受多路效应影响,并具有极佳的障碍物穿透能力,定位精度可以达到厘米级别[29]。UWB难以实现大范围覆盖,且不能直接迁移到智能手机上,定位成本非常高。
2.4 地磁室内定位
地球本身自带的磁场在不同经纬度其强度和方向都不同,在室内地磁场受到建筑物的干扰是一定的,所以室内不同位置的地磁强度不同,利用室内地磁强度和智能手机自带的地磁传感器就可以实现指纹定位[30]。地磁信号稳定,磁场强度变化小,也不用部署大量设备。但是室内位置的磁场强度存在相似特征问题[31],这对算法的特征提取能力和鲁棒性提出更高要求。
3 定位比较及存在问题
表1给出不同的定位介质在定位精度,定位成本,抗干扰性等方面的比较。
从表1可以看到不同定位介质有着各自优缺点,在考虑定位方案时往往成本,精确度会成为首要考虑的方面,但目前仍然没有一种定位介质可以很好平衡成本与精确度,在设计定位方案时,总要平衡成本和精确度。 现有的室内定位解决方案还有以下问题:
第一,缺乏普适性,不同的室内场所往往采用不同的定位技术,没有一个方案可以适应多个不同场所,如红外线定位在机器人定位上反应很好但却不适用于商场这样人员活动频繁的场所;
第二,不同设备由于软硬件的差异性给信息采集带来差异从而影响定位精度;
第三,现有的室内定位都是已知室内环境进行定位方案设计的,对环境依赖大,一旦室内环境遭到破坏或改变,定位精度就会下降甚至出现无法定位的情況。
4 结束语
基于位置的服务已经涉及人们日常生活的方方面面,实现高精度、普适性、低成本的室内定位方案仍是室内定位的研究方向与热点,随着5G移动通信时代到来,给室内定位也带来了新的活力,相信未来一定可以实现室内外全方位的无缝定位。
参考文献:
[1] Brena R F,García-Vázquez J P,Galván-Tejada C E,et al.Evolution of indoor positioning technologies:a survey[J].Journal of Sensors,2017,2017:1-21.
[2] 谢地,鲁照权,丁浩峰,等.基于超声波测距的高精度室内定位系统[J].传感器与微系统,2019,38(10):98-101.
[3] 毛玲,李振波,张大伟,等.基于红外传感器的移动微机器人定位研究[J].传感器与微系统,2014,33(12):38-41.
[4] 徐岩,王昕昕.多层ELM分区域可见光室内定位算法[J].湖南大学学报(自然科学版),2019,46(10):125-132.
[5] 李丽娜,马俊,徐攀峰,等.RFID室内定位技术研究综述[J].计算机应用与软件,2015,32(9):1-3,96.
[6] 毕京学,汪云甲,曹鸿基,等.一种基于全向指纹库的WiFi室内定位方法[J].测绘通报,2018(2):25-29.
[7] 周家鹏,汪云甲,李昕,等.地磁室内定位技术研究[J].测绘通报,2019(1):18-22.
[8] 裴凌,刘东辉,钱久超.室内定位技术与应用综述[J].导航定位与授时,2017,4(3):1-10.
[9] 申静涛.基于RSSI的对数距离路径损耗模型研究[J].电子质量,2013(12):15-17.
[10] 王星星,丛思安.室内定位研究方法综述[J].软件导刊,2019,18(9):9-12.
[11] 吴陈沭.基于群智感知的无线室内定位[D].北京:清华大学,2015.
[12] He C R,Guo S T,Wu Y,et al.A novel radio map construction method to reduce collection effort for indoor localization[J].Measurement,2016,94:423-431.
[13] 李军,何星,蔡云泽,等.基于K-means和Random Forest的WiFi室内定位方法[J].控制工程,2017,24(4):787-792.
[14] 杨慧琳,黄智刚,刘久文,等.基于核模糊C均值指纹库管理的WIFI室内定位方法[J].浙江大学学报(工学版),2016,50(6):1126-1133.
[15] Want R,Hopper A,Falc?o V,et al.The active badge location system[J].ACM Transactions on Information Systems,1992,10(1):91-102.
[16] Zhang W Z,Sakib Chowdhury M I,Kavehrad M.Asynchronous indoor positioning system based on visible light communications[C]//2014:045105.
[17] Zheng H H,Xu Z W,Yu C Y,et al.A 3-D high accuracy positioning system based on visible light communication with novel positioning algorithm[J].Optics Communications,2017,396:160-168.
[18] Ward A,Jones A,Hopper A.A new location technique for the active office[J].IEEE Personal Communications,1997,4(5):42-47.
[19] 罗宇锋,王鹏飞,陈彦峰.基于RSSI测距的WiFi室内定位算法研究[J].测控技术,2017,36(10):28-32.
[20] 杨帆,赵东东.基于Android平台的WiFi定位[J].电子测量技术,2012,35(9):116-119,124.
[21] 陈龙鹏,叶宁,王汝传.基于双神经网络的RFID室内定位方法[J].计算机系统应用,2019,28(11):218-223.
[22] 宋宁佳,崔英花.基于GA-GRNN的RFID室内定位算法[J].计算机工程,2019,45(11):298-302,308.
[23] 王乐,刘万青,黄观文,等.RSSI测距在蓝牙室内定位抗差算法中的应用[J].导航定位与授时,2019,6(3):82-87.
[24] 石志京,徐铁峰,刘太君,等.基于iBeacon基站的室内定位技术研究[J].移动通信,2015,39(7):88-91.
[25] 丁琳,管小卫,朱霞.基于RSSI的集群实时定位系统设计[J].国外电子测量技术,2014,33(12):69-73.
[26] 闫冬梅,任丽莉,王浩宇.基于Zigbee通信的室内定位系统[J].吉林大学学报(信息科学版),2018,36(2):218-222.
[27] 杨狄,唐小妹,李柏渝,等.基于超宽带的室内定位技术研究综述[J].全球定位系统,2015,40(5):34-40.
[28] 賈骏超.UWB室内定位测量数据处理方法研究[J].计算机应用与软件,2017,34(10):157-162,184.
[29] 何永平,刘冉,付文鹏,等.非视距环境下基于UWB的室内动态目标定位[J].传感器与微系统,2020,39(8):46-49,54.
[30] 余秋星.一种基于地磁强度特征的室内定位方法[J].中国新通信,2014,16(23):19-21.
[31] 丁瑞,孙幼聪,孙鹏,等.基于卷积神经网络的地磁室内定位[J].电子制作,2020(15):36-37,30.
【通联编辑:梁书】
- 小学语文教学中学生阅读能力的培养
- 混合学习在大学英语听说教学中的应用
- 初中音乐情感教学的探索
- 提升技工学校德育教师素质的策略研究
- 高中物理典型力学问题讨论
- 浅谈医院信息化建设中体会及发展策略
- 浅谈以卓越工程师培养为目标的通信工程创新型人才培养
- 大学网络文化建设的探索与思考
- 光纤通信实验教学改革探析
- 基于J2EE的考试系统的设计与实现
- 探析光传输设备的故障和防护手段
- 多层住宅光纤到户中FTTH技术应用分析
- 互联网电视技术与运营策略探究
- 浅谈移动通信FDD-LTE与TDD-LTE技术融合组网
- 信息技术公司节能降耗的探讨
- 机械手模型的PLC控制系统设计
- 可见光通信中的自适应OFDM调制的性能探究
- 白屈港水闸管理系统改造方案设计
- 减少电子文件丢失量
- S1240 JA00-A1机架改造成AG后语音单通故障分析与处理浅述
- 移动多媒体系统的实现及关键技术的研究
- 探析建筑智能化综合布线系统的接地技术
- 探析带业务本地网光缆割接技术
- 互联网邮箱的多节点部署负载均衡优化策略
- 综合业务接入区业务承载方案分析
- superindulgence
- superindulgences
- superindulgent
- superindulgently
- superindustries
- superindustrious
- superindustriously
- superindustriousness
- superindustriousnesses
- superindustry
- superinfer
- superinfered
- superinference
- superinferences
- superinfering
- superinferred
- superinferring
- superinfers
- superinfinite
- superinfinitely
- superinfiniteness
- superinfinitenesses
- superinfirmities
- superinfirmity
- superinfluence
- 奴下奴
- 奴仆
- 奴仆与主人共同做官
- 奴使
- 奴儿干都司
- 奴兵
- 奴军
- 奴几
- 奴化
- 奴哥
- 奴奴
- 奴婢
- 奴婢婢仆
- 奴婢的奴婢
- 奴子
- 奴字号
- 奴官
- 奴客
- 奴家
- 奴役
- 奴役束缚
- 奴性
- 奴才
- 奴才一心为他的主子效劳
- 奴才不可逞,孩儿不可哄