梅杰 周浩 王渍宇 赵文豪 胡皓文 郑万闯 韩芳


摘要:针对大多数家庭面对害虫问题束手无策现象,该探索旨在设计一种能够代替人自动杀虫作业的家用迷你机器人,帮助大多数家庭解决害虫困扰。该机器人采用传感器以及蚁群算法技术,能自主勘探害虫出没、探测路面的状况;底部采用履带式移动和伸缩的机械臂,提高移动的稳定及角落害虫捕捉的高效性,会对已确认的害虫自动进行化学药剂喷洒。实验结果表明该机器人能实现规划最优路径、快速辨识害虫类别,可达到普通家庭的使用要求,具有灵活高效的捕捉能力。
关键词:杀虫机器人;蚁群算法;机械臂;单片机;传感器
中图分类号:TP242? ? ? 文献标识码:A
文章编号:1009-3044(2021)14-0169-03
Abstract: Aiming at the phenomenon that most families are at a loss when facing the pest problem, this paper explores the design of a kind of household mini robot that can replace the human automatic pest control operation to help most families to solve the pest problem. Using sensors and ant colony algorithm technology, the robot can independently detect the presence of pests and the condition of the road. Crawler moving and telescopic robotic arms are adopted at the bottom to improve the stability of movement and the efficiency of pest capture in corners. Chemical spraying will be carried out automatically on confirmed pests. The experimental results show that the robot can realize optimal path planning, quickly identify pest categories, meet the requirements of ordinary families, and has a flexible and efficient capture ability.
Key words: insecticide-killing robots;ant colony algorithm; mechanical arm;singlechip;sensor
1引言
伴隨着科技的进步,琳琅满目的机器人的应用也非常广泛,但是能够替代人进行捕捉害虫的机器人的发展的还很初步。害虫捕捉的方式多种多样,应用红外线对射技术设计的害虫捕捉器不仅准确率高,而且可移动性强。本文探索设计一个注重捕捉能力的迷你仿生杀虫机器人[1],机器人在红外对射技术的基础上增加机械臂定位导航系统、双目视觉系统,使得机器人在捕捉害虫方面准确性更高。机器人在机械设计方面采用六自由度机械臂[2],目前使用六自由度机械臂的设计多数局限在农业方面,涉及在其他方面应用的并不多,本文探索将该技术应用在杀虫机器人上,解决人无法达到的地方来辅助捕捉害虫[3]。本文探索设计的机器人能够进一步生活化,符合大众的设计要求,利用现代的人工智能技术实现全自动化识别和捕捉。
2 设计思路
该机器人整体设计结构是底部采用履带式,两条履带旋转运行以保证在任何路况的稳定性,履带的上面携带方形身体,身体之上是捕捉害虫最关键的六自由度机械臂。机械杆在遇到特殊情况就会像雨伞杆壁一样伸长,使得最上方的360°摄像头可以升高降低。这个机器人身体顶部往外的六自由度机械臂,机械臂端口有一个可以活动的架子,用来通过机械臂捕捉害虫。
机器人基本工作原理是:第一步,通过热传感确定害虫所在大致空间的位置,并移动到合适的起始位置。第二步,利用蚁群算法规划最优路径并实施跟踪操作。第三步,定位到害虫位置,向六自由度机械臂末端执行器发送指令抓捕害虫。第四步,从机械臂末端喷发器喷洒药物捕杀害虫或者利用机械爪子捕捉害虫。
3 功能设计
3.1 路径规划
本设计为了更好地适用于在家庭的特殊环境中捕捉害虫,使用了蚁群算法来规划最优路线。传统蚁群算法无法快速得出最优路线,且容易得到局部最优解的错误解,本设计采用文献[4,5]中提出的改进版的蚁群算法,并且对原有的蚁群算法进行适当的改进,扩大了目标点对路径搜索的吸引力。即:
f(n) = ng(n) + (1 — n)eh(n)h(n)
(其中,n 为[0,1]之间的常数,表示 g(n)与 h(n)对 f(n)的影响程度;eh(n)增强了启发函数对估价函数的影响程度。)
蚁群算法的提出来源于蚂蚁们在觅食的过程中选择路径的一种天生行为,这种行为会为整个蚁群带来好处,节省觅食的时间并提高觅食的效率,从而提升整个蚁群的生存能力,适应物竞天择,适者生存的自然法则。蚂蚁找到食物所在的最优路线所依赖的重要因素是信息素和环境,从蚂蚁窝到食物之间会有不同的蚂蚁行走不同的路线,他们会在自己的路线上留下信息素,而路程最短的那条路因为蚂蚁通过的次数最多、数量也会最多,所以留下的信息素也会更浓郁,之后出去觅食的蚂蚁都会循着这条路去觅食。这就是蚁群算法的基本思想。蚁群算法就是模拟蚂蚁觅食中寻找到最短路径的过程,蚁群算法能够从原点开始到目标点结束,经过各种条件的约束最终得到返回原点所得到的最短路径。
蚁群算法的机制是类似与形成一种正反馈的机制,采用这种正反馈机制,使得探索过程所搜索的结果不断地收敛缩小,然后最终得到一个最优的解,即最优的路径。蚁群算法在求解的性能上更厉害,在异常的情况下和危险的情况下具有更强得生存能力。本设计中选用蚁群算法具有在复杂多变的周围情况下通过计算得到最优路径的能力,并且蚁群算法的包容性和可塑性也较强,对传统的蚁群算法进行基本的修改后加以运用到本设计中,来解决应用的特定问题。本设计通过将蚁群算法和模糊算法相结合,增强了仿生杀虫机器人寻找最优路径的能力。
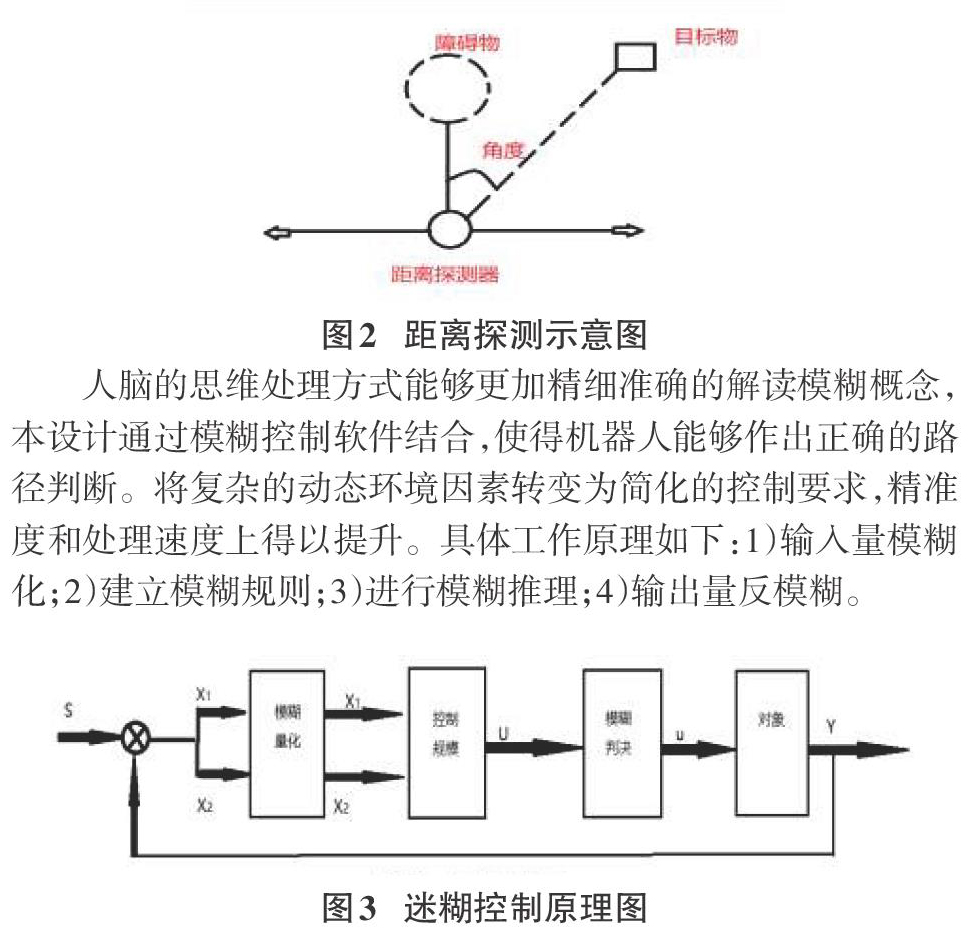
本设计的仿生机器人在运行过程中由于位置控制受外界条件的影响较多。为了更好地实现机器人避障行走,采用超声波传感与模糊控制相结合对外界环境进行感知,并探测得到障碍物的方位。超声波距离传感器采用周期扫描的方式进行远距离检测,将机器人观察的范围分为不同的部分,记录下每个不同部分视角中探寻到的障碍物的远近,通过测量计算得到详细的外界环境[6]。超声波距离传感器探测示意图如图2所示。
人脑的思维处理方式能够更加精细准确的解读模糊概念,本设计通过模糊控制软件结合,使得机器人能够作出正确的路径判断。将复杂的動态环境因素转变为简化的控制要求,精准度和处理速度上得以提升。具体工作原理如下:1)输入量模糊化;2)建立模糊规则;3)进行模糊推理;4)输出量反模糊。
其中s:系统的设定值。
x1、x2:模糊控制具体的值。X1、X2:经过模糊量化后的值。
U:在模糊控制规则下处理过后通过理性推测后得到模糊控制量。
u:在模糊判决过后得到的控制量(精确量)。y:对象的输出。
模糊控制器的输入是超声波采集的距离信号和机器人与目的地方向的夹角信息,输出是杀虫机器人的转动角度。机器人在前进的时候,需要探测与障碍物的距离远近和与目的地的角度来计算和规划,最终得到需要转动的角度,来得到最优的前进路线。当检测到目标地点前有阻碍物时,机器人会调整适当的方向,改变之前规划的路线来达到有效的躲避障碍物的目的[6]。
3.2 高清摄像头
本设计使用的高清摄像头模块是一款无线Wi-Fi协议的超低功耗720P视频分辨率的智能视频模块,本模块物品具有的优点是产品的尺寸较小,容易组装,使用简便。该模块还具有强大的Wi-Fi功能,支持远程网络的连接,以及具有照相和录像的功能。摄像头模块集成了对视频图像的采集,编码压缩,传输等功能。摄像头模块采用高效的硬编码方式,强大的Wi-Fi通讯模组,保证了拍摄视频的清晰度和流畅度。图4中1为主摄像头;2为串行接口;3为复位按钮;4为Wi-Fi天线。
3.3 喷洒捕杀
机器人在捕杀害虫时,需要近距离的喷洒杀虫剂,而害虫的藏身之地大多比较隐蔽、狭小,机器人的全局不能够灵活行动,需要一个灵活度较高的机械臂来辅助机器人完成杀虫工作,本设计通过对机器人配合折弯机进行折弯作业进行调研和分析,确定用六自由度直角坐标折弯机器人的相关参数来设计机械臂[7]。根据本机器人工作的实际需要,本设计采用六自由度机械臂,它的机械臂由腰关节、肩关节、肘关节和腕关节组成,采取减轻自身质量均取材碳纤维的设计,机械臂的抓捕进程控制是经过顶部摄像机定位害虫的三维中心坐标并转化到机械臂坐标系,控制着机械手臂各关节的运动,将末端执行器送至距离害虫3-4厘米的位置,实施捕捉行动。具体设计如下图5所示,实体图如图6所示。
3.4可变形履带运动
履带是履带机器人中的重要部件之一。它的功能是保证机器人在无路地面上的通过性,从而降低车辆的行驶阻力。而履带机器人的稳固性可以通过履带张紧力来进行评估,它对于履带行驶系统的性能有非常大的影响。本文设计采用履带式运动的方式,该履带具有可变形,360度转向等特点。在工作的时候,路形可能有些崎岖,对行走能力要求严格。可变形式履带可以解决这个问题,履带会随着地形的变化而变形。360度转向特点,可以达到万向快捷喷洒药剂的要求,减少行走路程。机器人整体的灵活性,地形适应性强,转向半径小等优点也得以凸显出来[8]。
3.5 手柄控制
人机交互界面在控制系统中十分重要,可以在必要的时候发挥着出乎意料的作用。机器人在经过复杂路面时经常会出现侧翻或者被卡住的现象,甚至其他意想不到的突发情况,这单靠机器人本身的智能探测和路径规划的模块是无法做到处理这些突发状况的,此时可以借助手柄来控制机器人,用人们的经验和更加强大而又细致的操作来处理突发状况。手柄的操作方便直观,本设计中选用常见的PS游戏手柄作为操作的设备,PS手柄与单片机通信时只需要4根信号线,占用的I/O口比较少并且通讯协议比较简单,非常适合在机器人控制中使用。具体按键说明如表1所示。
4 结论
随着社会发展,机器人已经和人们生活息息相关,本文通过借鉴类似应用在农业的六自由度机械臂,以及人工智能等技术来设计仿生杀虫机器人。本文设计的迷你仿生杀虫机器人根据仿生学原理,结合模糊算法和蚁群算法,实现了准确的害虫捕杀,提高了捕捉害虫的效率、自主性以及机器人行动的稳定性,但是在药剂使用方面还存在着一定的缺陷,对于某些害虫存在抗药性,药剂的作用范围会因此受限制,并且对行动非常敏捷或者飞行快速的害虫的捕杀和处理上具有一定的局限性。在今后的研究中将会找到一种更科学的方法来改善文中依靠药剂捕杀的偶尔性和单一性。
参考文献:
[1] 王红民,张元,廉飞宇,等.红外线技术在粮仓害虫检测中的研究与应用[J].河南工业大学学报(自然科学版),2010,31(3):80-81,85.
[2] 邵堃.五自由度机械臂的番茄智能采摘机器人[J].江苏农业科学,2018,46(21):250-253.
[3] 家用机器人市场前景广阔 巨头们纷纷抢滩布局[J].商业观察,2018(8):40-41.
[4] 周敬东,郑小玄.基于改进蚁群算法的路径规划方法[J].湖北工业大学学报,2018,33(5):49-52,101.
[5] 马金科,王直.基于改进蚁群算法的盘点型机器人路径规划[J].计算机技术与发展,2019,29(7):84-87.
[6] 赵宏才,郭佳乐,徐肖鲸,等.基于模糊蚁群算法的移动机器人轨迹规划研究[J].计算机仿真,2018,35(5):318-321.
[7] 杨中.面向折弯作业的五自由度机械臂设计及运动控制研究[D].南京:南京邮电大学,2018.
[8] 王亚翔,张俊俊.基于正交实验的履带机器人张紧力优化[J].西南科技大学学报,2018,33(4):98-102.
【通联编辑:唐一东】
- 怎样培养七年级学生学习数学的兴趣
- 局域网在中职学校的应用
- 浸透思想追求境界
- 在语境中学习英语词汇培养学生学科核心素养
- 石本无火,相击而生灵光
- 刍议小学生语文学习厌学的现象和对策
- 中职学校酒店服务与管理专业学生的职业生涯规划
- 浅谈幼儿园区域游戏的有效组织和实施
- 小学语文有效提问的设计与实施
- 幼儿群体合作的探讨
- 会计手工项目实训模式的探索与实践
- 幼儿棍球竞赛游戏的实施与评价
- 放飞思维体验语文情感美
- 探究小学生厌学数学成因与对应策略
- 变电运行值班员仿真培训
- 青少年人际关系心理辅导一例
- 关于青海农村英语教师的专业发展现状及改进方案的思考
- 打造高效课堂
- 幼儿园卫生间文化的创建与思考
- 核心素养发展下小学数学深度学习探析
- 浅谈区域活动中材料的投放
- 浅谈小学语文口语交际能力的培养
- 变被动为主动变厌学为乐学
- 教师的故意,引发学生的质疑
- 浅谈初中语文读写一体化教学模式的实践分析
- vibe
- vibrancy
- vibrant
- vibrantly
- vibrants
- vibrate
- vibrated
- vibrates
- vibrating
- vibratingly
- vibration
- vibrational
- vibrationless
- vibrations
- vibrato
- vibratoless
- vibratos
- vicar
- vicarage
- vicarages
- vicargeneralship
- vicariism
- vicariisms
- vicarious
- unruinable
- 湿敏陶瓷
- 湿木头生煤炉——烟多火少
- 湿木柴塞进火炭里——越煨越有气
- 湿杏
- 湿柴无潮饭,干柴无干水
- 湿柴火烧锅
- 湿棉花做鞋底——打成一片
- 湿毛
- 湿毛(时髦)
- 湿气
- 湿气浓重
- 湿水棉花——无得弹(谈)
- 湿水棉花——没得弹(谈)
- 湿水的棉花——没什么可弹(谈)的
- 湿水的棉花——没法弹(谈)了
- 湿水的炮仗
- 湿水的鞭炮——响(想)不起来了
- 湿汪汪
- 湿津津
- 湿津津湿浸浸
- 湿洳渐洳
- 湿浊
- 湿浸浸
- 湿润
- 湿润润