刘鑫

摘要:电机是我们生活当中不可或缺的一个重要部分,为了能够更好地保证我们国家的发展,电机相关的技术和我们需要关注的电机质量都是十分重要的。而随着我们国家的科技技术不断发展,基于永磁同步电机的滑模观测成为我们现如今最常使用的电机之一,我们下文当中就将详细地探讨基于永磁同步电机滑模观测以及其控制的相关策略。
关键词:永磁同步电机;滑模观测器;控制效率;控制策略
中图分类号:TP311? ? ? 文献标识码:A
文章编号:1009-3044(2021)14-0193-02
永磁同步电机实质上是一种通过无传感器技术制作的电机,其具有相当多种的优势,像是其花费较少的同时,维修时所需要的费用和精力也较少,另外在结构方面,永磁同步电机也具有结构简单的特性。永磁同步电机的主要作用是通过无传感器控制技术来进行内部的转速控制,基于PMSM凸极效应的高频信号注入,能够对永磁同步电机当中的转速进行初步的控制,从而保证电量的产出,另外则会采用到一种电机模型的估算法,这种方法会将永磁同步电机当中的滑模观测器进行控制,这也是我们如今永磁同步电机当中的一个研究重点。
我们接下来将要探讨的就是,关于传统的滑模观测器和现如今永磁同步电机的滑模观测器之间的区别。我们要知道的是传统的滑模观测器具有一些缺点,首先就是由于切换函数是符号函数的缘故,这种系统存在着高频抖振的问题,另一方面在永磁同步电机的调速系统当中,电机的转速需要实时的反馈到系统当中,然后通过系统反馈给输入端,在传统的速度当中,PI控制器能够满足基本的使用要求,能够将调速完整的传输到输入端当中,但是同样的这种调速的准确性比较依赖系统本身的模型准确性,很容易因为外界的各种因素和参数发生改变,从而导致调速的不准确。而滑模观测器则是对这种系统的一种改良方式,因为滑模观测器对于模型的精确度要求不高,所以在外部干扰和外部参数出现的时候能够有效地保持自身的准确性。
1 滑模观测器
1.1 二阶滑模观测器
首先,我们先要进行讲解的是滑模观测器,滑模观测器实际上指的是一种状态重构器,属于一种电机当中的动态系统,在系统进行变量的输入的时候,将输入的变量进行计算,得出状态变量估计值,然后进行电机的控制[1]。这种滑模观测器的作用一般情況下包含以下三种,第一种是为状态反馈技术提供了最基础的设备需求,另一方面就是在控制工程当中进行具体应用,像是通过复制扰动来实现扰动的完全补偿。第二个作用就是对整个电机的实际操作系统进行实时的控制和测量,保证实际系统的输入和输出的时候,对系统内部的状态进行一个估计,得出一个估计值。第三个作用则是进行反馈作用,将估计状态逐渐逼近正常的输出和测量输出值。
在传统的表贴式PMSM在坐标轴当中进行定子电流的模型建立,然后将其作为状态变量的数学模型,将定子电流设置为坐标系的分量,而定子电压同样作为坐标轴的分量。另外我们根据电机数学模型和滑模理论,可以通过S(x)=iS-iS,在这个公式当中,iS是电机当中的估计值,而iS则是电机当中的实际电流反馈值。由于在整个过程当中,能够进行测量的数值只有电机当中的定子电流,所以我们可以通过滑模面的选择来进行其他值的控制,像是将滑模面S(x)=0选取在定子电流轨迹上,这样就能够控制公式当中的电流估计值等于电流实际值。这样一来,我们就可以通过二阶计算进行公式的改变,变成:
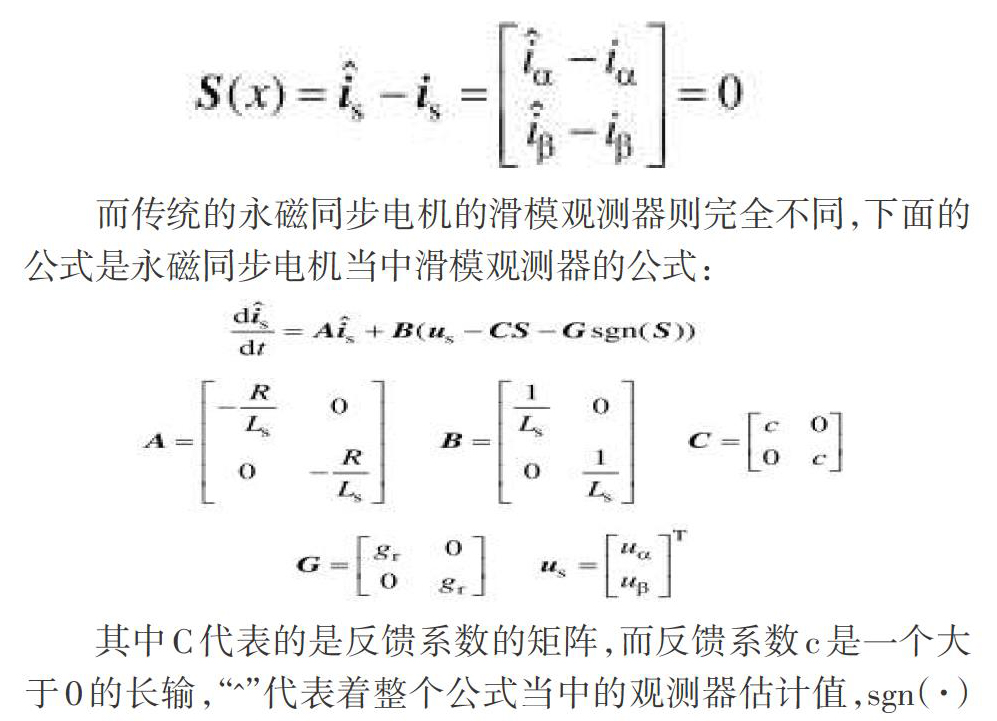
而传统的永磁同步电机的滑模观测器则完全不同,下面的公式是永磁同步电机当中滑模观测器的公式:
其中C代表的是反馈系数的矩阵,而反馈系数c是一个大于0的长输,“^”代表着整个公式当中的观测器估计值,sgn(·)则是整个电机当中的开关函数,G是开关增益矩阵,gr则是整个滑模观测器当中的开关增益,为了更好地保证永磁同步电机准确性,我们需要根据等效控制原理进行反电动势的控制,可以将反电动势通过状态变量的误差值和开关函数一同表示[2]。
低通滤波器的引入一方面会使得整个电机当中出现相位延迟问题,另一方面由于相位延迟的缘故,在低通滤波器当中会出现截止频率和输入信号的频率不同的情况,这个时候就需要采用相位补偿的方式来进行频率的弥补,但是相位补偿的方法会导致整个电机的控制系统的运算量大大增加,从而导致卡顿,进一步就有可能导致整个控制系统的运输数据速度变得缓慢,造成误差的出现。所以为了更好地解决这一问题,我们会通过正交锁相环处理反电动势的观测值误差,同时还能够有效的简化锁相环参数设计。
1.2 全阶滑模观测器
传统的滑模观测器和现如今我们所使用的滑模观测器有一定的不同,我们所说的另一种滑模观测器是现如今大规模使用的叫作全阶滑模观测器,全阶滑模观测器在实际使用当中,其对于调速系统的影响和传统的二阶滑模观测器对调速系统造成的影响是完全不同的。这种全阶滑模观测器会通过双曲正切函数进行自身数据的调整,通过双曲正切函数替换sgn函数的方式来进行抖振问题的解决。除此之外,边界层的设计同样能够有效地控制双曲正切函数,并且实现软开关滑模观测器的控制。而这两者所表现的函数为:
边界层的设计目的就是通过实现软开关滑模观测器来进行抖振问题的解决,边界层的厚度就是当中的δ,边界层厚度的厚度越大,那么对于抖振的抑制力也就越大,但是如果边界层的厚度过大,那么虽然能够有效地减少抖振的影响,但是同时也会由于过厚的厚度而导致滑模观测器的反应速度变得缓慢,使得整个电机的系统鲁棒性降低。
2 滑模观测器的速度控制
上文中已经详细地说明了滑模观测器的功用以及它的重要性,那么这里就需要开始讲解滑模观测器的控制方法。首先我们要知道滑模观测器的设计过程需要设计哪些方面,这里我们所需要进行探讨的部分就是滑模观测器的控制系统组成方面,滑模观测器的速度控制系统一般情况下,其所控制的各个设备进行组成,这其中可能包括各种各样的技术和公式。就意味着如果想要让滑模观测器的系统性能提升,那么就需要对技术和公式都进行设计改良[3]。
第一个我们所选择的方式就是对速度控制系统的算法进行一定的设计,我们要知道的是滑模的速度控制一般情况下是基于相平面的控制,其主要的原因是在任意出发位置都能够通过趋近律进行控制,然后引导到滑模面上进行进一步的控制。但是,与此同时传统的滑模观测器会面临抖振问题,我们可以通过双曲正切函数进行sgn函数的替换尽可能地减少抖振问题的影响,但是同时又会导致整个系统的鲁棒性下降,然后我们又需要通过解决鲁棒性的下降进行系统性能的提升,然后又会导致抖振问题,各个问题环环相扣。所以本文当中将会对这些问题进行统一的解决,具体的方法就是通过具有扰动观测和补偿能力的抗干扰滑膜控制器进行常规PI速度的控制,从而提升系统性能。这同样也是我们所选择的技术方面的改良,我们直接通过更换滑膜控制器的方式来解决原本传统的滑膜控制器所无法做到的事情,从而提升整个速度控制系统的性能。通过技术的更迭来增加原本传统的滑模观测器所无法做到的事情,另一方面还能够通过技术的更迭来提升整个传统的滑膜观测器性能。
另一方面就是关于速度控制系统的改良,我们要知道的是速度控制系统当中所包含着整个电机的动作模块,也就是速度控制器的运行根本。速度的控制主要来源于算法,而为了能够更好地提升整个系统的性能,那么对算法就需要进行一定的更新和改良。所需要进行设计的部分就是速度的控制算法,速度控制系统所拥有的系统惯量十分巨大,同时其所需要的控制精度也很高,所以速度控制算法也是一个必要的事物[4]。另外,在进行速度控制算法的设计时,需要注意的地方一般情况下是,在改良的时候,我们需要保证我们是为了能够获得更好的控制效果,而进行速度控制算法的改良。那么在改良速度控制算法的过程中,最为重要的就是提高算法对于系统的控制力,如果控制力达到要求,那么这个速度控制算法就是成功的。然后就是对控制系统的编程内容,除了使用GX Developer这个编程程序来进行速度控制系统的算法改良之外,还可以使用一个基于Linux 的国产控制系统Jariworks,这个编程程序能夠更好地进行实时的操作反应,并且具有很强的多任务处理能力。在进行程序的处理过程中,Jariworks相对于GX Developer而言,具有一定的优势,像是在资金方面,Jariworks所需要的资金较低,而GX Developer所需要的资金则较高。并且,Jariworks所拥有的各种功能能够在进行内核的配置选择时,减少冗余,并且提高整体系统的稳定性。从而达到提升整个速度控制系统的目的。
3 仿真实验
在模拟实验当中,我们能够更加明显地看出两者之间的差距,并且能够有效地评价传统滑模控制器和本文当中所采用的具有扰动观测和补偿能力的抗干扰滑膜控制器(Anti-disturbance Sliding Mode Controller,ASMC)。我们在仿真实验中可以对电机的参数进行设置,然后我们对传统的滑模控制器进行一次测量之后,开始逐步加入本文中所说的各种改良措施[5]。就像是我们通过使用全阶滑模观测器替换二阶滑模观测器的方式就有效地提升了永磁同步电机的滑模速度,另一方面,锁相环的控制方法也有效地提升了整个系统的工作效能。
传统的二阶滑模观测器在实验当中,电机低速和高速阶段的抖振现象都十分明显,但是本文当中所使用的全阶滑模观测器则有效地将抖振现象进行了控制,甚至有的时候抖振现象已经降到无法观测的程度。这样一来,不仅仅有效地提升了观测器的观测精度,另一方面还使得观测器能够更好地追踪电机当中的转子位置。为了进一步地确保我们所提出的建议能提升电机的工作效率和系统效率,我们将会通过控制实验平台进行实验研究,确保最终的数据准确性的同时,二次检查本次所提出的建议的作用大小。
4 结束语
随着我们所生活的时代不断的进步,我们对生活的水平需求也越来越高,也正是因为如此,我们现如今所使用的电梯以及自动扶梯这样的电子产品中,所使用的电机就是永磁同步电机。而永磁同步电机一直都以其先进以及创新而闻名,所以永磁同步电机也向卫星和国防系统中提供电机。上文当中,就是我们关于基于永磁同步电机滑模观测与控制的策略研究。
参考文献:
[1] 刘计龙,肖飞,麦志勤,等.IF控制结合滑模观测器的永磁同步电机无位置传感器复合控制策略[J].电工技术学报,2018,33(4):919-929.
[2] 郭磊磊,王华清,代林旺,等.基于超螺旋滑模观测器的永磁同步电机无速度传感器控制方法[J].电力自动化设备,2020,40(2):21-31,34.
[3] 张利深,贵献国,严亮.基于滑模观测器的永磁同步电机直接转矩控制研究[J].微特电机,2019,47(7):61-64.
[4] 柯希彪,郭琳,袁训锋,等.基于模糊控制的永磁同步电机滑模观测器控制[J].自动化与仪表,2020,35(5):34-39.
[5] 吴定会,杨德亮,陈锦宝.基于滑模观测器的永磁同步电机矢量控制[J].系统仿真学报,2018,30(11):4256-4267.
【通联编辑:李雅琪】
- 黑龙江种植区不同玉米品种胚乳淀粉粒发育对比分析
- 黄壤甘蓝-烤烟模式下氮钾利用对氮钾配施的响应
- 不同年代冬小麦品种氮素吸收利用和产量对施氮水平的响应
- 鸡骨草茎叶水提液对10种农作物种子的化感效应
- 包膜控释尿素对玉米花后干物质和氮素积累与分配的影响
- 小麦面团粉质特性的遗传分析
- 河南省许昌市降雨侵蚀力演变特征研究
- 基于信息熵的重庆市土地利用结构时空演变及其驱动因素分析
- 不同施肥方式对稻田氨挥发特征的影响
- 高浓度养牛废水化学絮凝预处理技术
- 赣南地区近40年秋冬季降水量变化及对甜柚的影响
- 冀东地区降水特征变化对冬枣管理模式的影响
- 气候变化背景下四川省设施农业气候资源特征分析
- 一株高产淀粉酶放线菌的筛选鉴定及产酶条件优化
- 长期定位施肥对旱作土壤团聚体及养分的影响
- 增施有机肥对黄泛冲积区贫瘠土壤养分和玉米产量的影响
- 头花蓼整株及根际土壤水浸提液的化感自毒作用
- 径流污染对2种地被植物固碳释氧降温增湿能力的影响
- 罗氏沼虾仁制品货架期模型的建立
- 不同产地艾叶红外指纹图谱研究
- 沃柑低温环境贮藏的品质变化分析
- 不同类型土壤养分区域对烟叶工业可用性的影响
- 壳聚糖季铵盐和皂土在黑莓果酒澄清中的应用
- 桑葚浓缩汁的制备工艺优化及其抗氧化活性
- 海康鸡屠宰性能及肉质特性分析
- steeps
- steep²
- steep¹
- steer
- steerabilities
- steerability
- steer clear
- steer clear of
- steered
- steerers
- steering
- steeringcommittee
- steering comˌmittee
- steerings
- steeringwheel
- steering wheel
- steering wheels
- steerish
- steerling
- steers
- steer²
- steer¹
- stellar
- stellardom
- steller's sea lion
- 交遍天下友,知心有几个
- 交遍天下友,知心有几人
- 交道
- 交配
- 交配期的公牛
- 交酢
- 交钞
- 交钥匙工程
- 交钩
- 交钱以免除劳役
- 交钱以免除杖刑
- 交钱以减免徒刑
- 交锋
- 交错
- 交错丛生的草木
- 交错出现
- 交错叠置的梁
- 交错四出的枝
- 交错地流
- 交错坠落
- 交错安排
- 交错散乱的样子
- 交错杂乱
- 交错杂乱的样子
- 交错杂沓的样子