张海柱 符秀辉
摘 要:首先,对UR5六轴机械臂进行运动学建模。在对运动学理论进行深入研究的基础上,根据齐次变换矩阵理论,采用D-H法则建立机器人运动学的数学模型,调用MATLAB软件中的Robotics Toolbox工具箱建立机器人模型,通过实验仿真分析,验证了机器人模型的可靠性,以及机器人正、逆解的准确性。
关键词:MATLAB Robtics Toolbox;运动学分析;轨迹规划
目前,机械臂式工业机器人在工业生产、搬运、加工等领域得到了广泛的应用。通过仿真的方式复现机械臂运动,能够直观地监视手臂各部分的运动情况[1]。因此机器人的仿真在机器人技术的研究和开发中具有重要,它可以用来验证机器人的工作原理、工作空间、运动功能、运动学和逆运动学方程求解的有效性,同时对比各种控制算法法优劣有非常重要的指导作用[2]。本文采用D-H法参数建立机械臂模型,利用MATLAB的Robotics toolbox工具箱建立机械臂关节的运动学模型,分析机械臂的运动学问题和基于关节空间的轨迹规划问题。
1 UR5机械臂模型建立
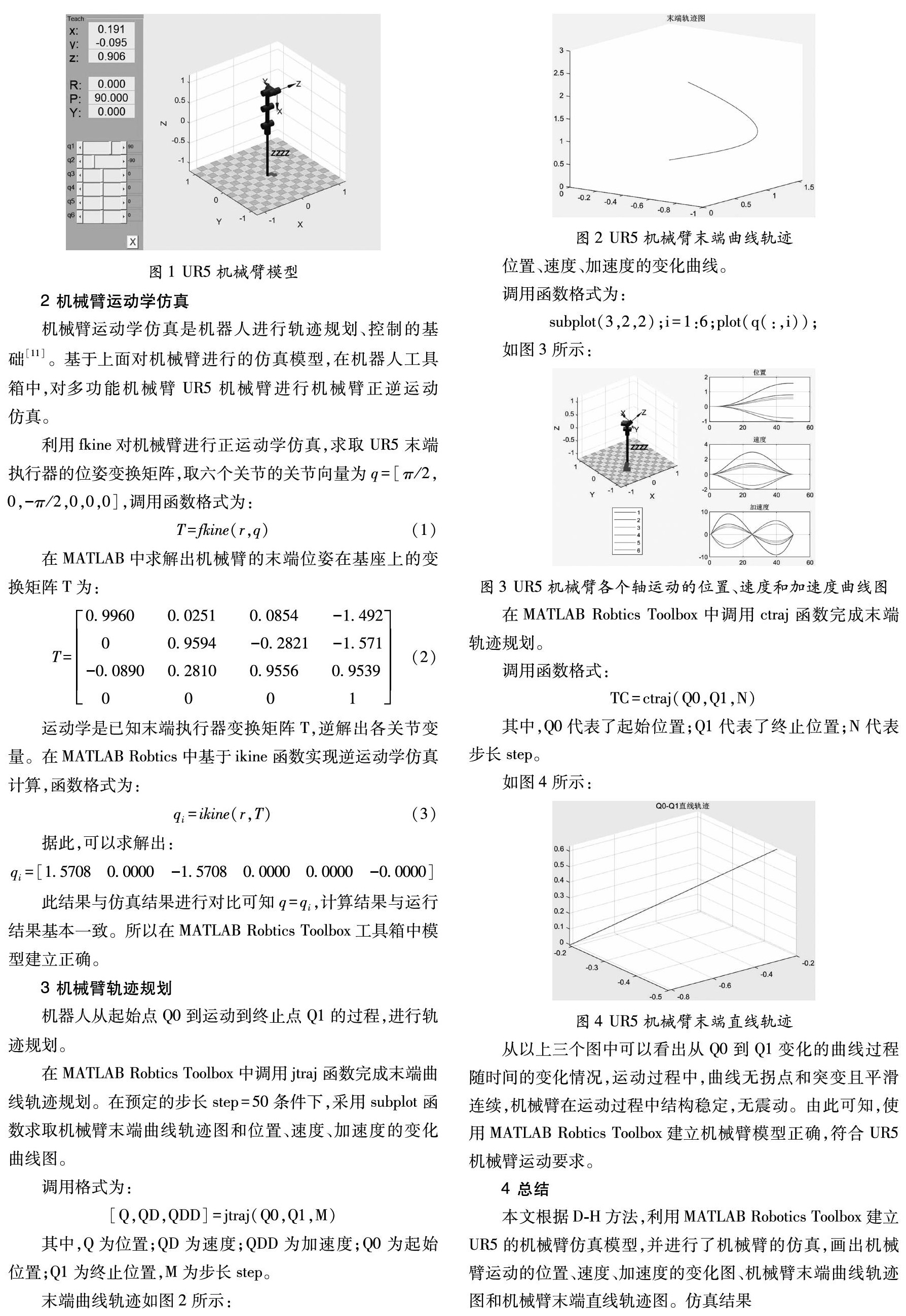
UR5机械臂的主要技术指标:负载5kg,工作范围850mm,重复定位精度±0.03mm,关节运动范围为所有关节±360°,各个关节的运动速度最大180°/秒。UR5可以在有限范围内以预先设定的程序进行相应的工作,并且可以附加许多的外部设备。UR5机械臂主要由基座、上臂、下臂、手臂、手腕组成.有六个自由度,均为旋转关节,1轴为基座回转运动,2轴为上臂倾角运动,3轴为下臂倾角运动,4轴为手臂摆动,5轴为手腕倾角运动,6轴为手腕回转运动[3][4]。
机械臂的运动学建模方法有很多,最常用的方法就是D-H参数法。该方法是在20世纪50年代中期,由Denavit和Hartenberg提出的,用于创建机器人运动学模型[5][6]。该方法的优点就在于无论机械臂的物理构型有多复杂,在机器人运动学建模方面它都适用。在用D-H表示法建立机器人得到运动学方程时,说先必须要为机器人的每个活动关节定义一个参考坐标系,其次需要确定从基座开始到第一个关节、再到第二个关节一直到最后一个活动关节的总变换矩阵。
六轴机器人运动学仿真主要分为正运动学和逆运动学,正运动学主要是已知各个关节角度轨迹,通过正运动学求解得到机器人末端在各个时刻的运动轨迹。逆运动学主要是已知机器人末端的运动轨迹,从而通过逆运动学求解反算出各个关节的运动轨迹。
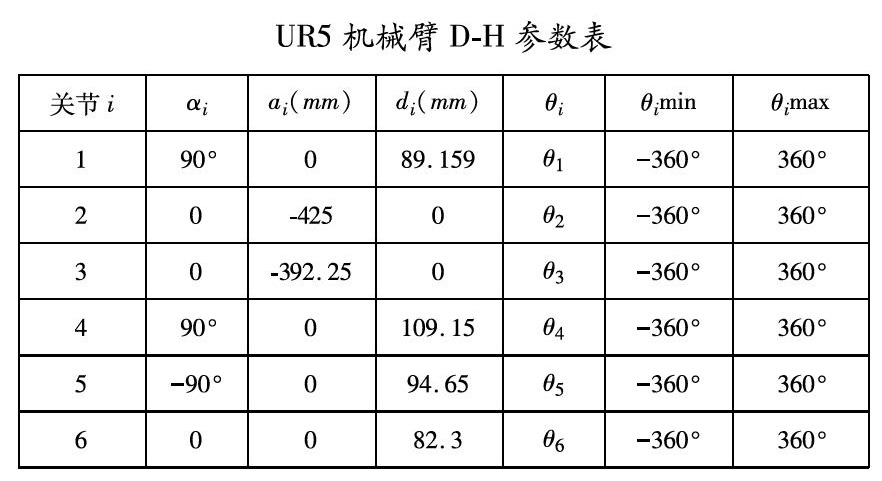
根据D-H参数建模法,得到机械臂的D-H参数,见表:
从以上三个图中可以看出从Q0到Q1变化的曲线过程随时间的变化情况,运动过程中,曲线无拐点和突变且平滑连续,机械臂在运动过程中结构稳定,无震动。由此可知,使用MATLAB Robtics Toolbox建立机械臂模型正确,符合UR5机械臂运动要求。
4 总结
本文根据D-H方法,利用MATLAB Robotics Toolbox建立UR5的机械臂仿真模型,并进行了机械臂的仿真,画出机械臂運动的位置、速度、加速度的变化图、机械臂末端曲线轨迹图和机械臂末端直线轨迹图。仿真结果证明了力运动学模型的建立正确,为后续的机械臂的研究分析打下了基础。
参考文献:
[1]夏伟,吴玉文.基于MATLAB Robtics Toolbox的机械臂轨迹仿真研究[J].河南科技,2020,702(4),54-56.
[2]万正海,李锻能,等.移动机器人机械臂运动分析及轨迹规划[J].机床与液压,2019,47(23),56-60,68.
[3]岳晴晴.六轴工业机器人轨迹规划的研究[D].江苏科技大学,2019.
[4]赵仁豪,李亮.六自由度机械臂建模与MATLAB仿真[J].宝鸡文理学院学报,2019,39(3),69-74.
[5]蔡自兴.机器人学[M].清华大学出版社,2015.
[6]刘芳君.六轴工业机器人运动学分析与轨迹规划研究[D],重庆邮电大学,2019.
[7]柳洋.配电线路维护机器人运动规划与实验研究[D].南京理工大学,2017.
[8]马宇豪.六自由度机械臂避障轨迹规划及控制算法研究[D].中国科学院大学,2019.
[9]任伟,江明.六自由度机械臂轨迹规划算法研究[J].安徽工程大学学报,2019,34(6),52-59.
[10]左富勇,胡小平,谢珂,等.基于MATLAB Robotics工具箱的SCARA机器人轨迹规划与仿真[J].湖南科技大学学报,2012(2):43-46.
作者简介:张海柱(1996—),男,蒙古族,内蒙古赤峰人,硕士,研究方向:机器人。
- “互联网+”背景下政府采购管理专业教师专业素养的研究
- 浅论计算机网络工程信息化管理
- 用户体验式网页编排的视觉设计研究
- 信息化在运输档案管理中的使用方法
- 无线数据及能量协同传输技术研究
- “多规合一”空间规划体系的构建研究
- 电子信息技术中的问题及发展趋势
- 电子信息与电气学科的发展战略初探
- 基于AT89C51单片机花式流水灯的设计与实现
- 基于Arduino的全地形越野机器人设计与竞赛
- 高中化学有机物学习探究
- 高中物理电磁学知识在生活中的应用
- 项目化混合式教学模式在高职《计算机导论》教学中的应用
- 高中信息技术课程中如何养成计算思维
- 中高职课程衔接的研究与实践
- 基于遗传算法的TSP问题优化方法
- 材料科学与工程学科专业课程思政的思考
- 新旧动能转换下机电一体化技术专业的学徒制探究
- 从高中生视角谈电气自动化中节能技术的有效应用
- 浅议士官学员在校期间军事训练伤的有效预防
- MDOS平台雨量常见疑误信息的处理方法
- 由“高中物理斜面问题”浅谈岩质边坡破坏受力分析
- 关于数控维修专业数字化课程建设的实现方法分析
- 浅谈青年教师师德师风现状
- 江苏省中高职衔接“3+3”分段培养现状及问题研究
- preachingly
- preachings
- preachy
- preacid
- preacidities
- preacidity
- preacidness
- pre-acidness
- preacidnesses
- pre-acidness's
- preacknowledge
- preacknowledged
- preacknowledges
- preacknowledging
- preacquaint
- preacquaintance
- preacquaintances
- preacquainted
- preacquainting
- preacquaints
- preacquire
- preacquired
- preacquires
- preacquiring
- preacquisition
- 炙手而热
- 炙晒
- 炙毂膏腴
- 炙浪
- 炙灼
- 炙炉(儿)
- 炙烈
- 炙烤
- 炙热
- 炙煿
- 炙爨
- 炙眉
- 炙羊
- 炙肉
- 炙肤皲足
- 炙背
- 炙背献
- 炙背献芹
- 炙脍
- 炙輠雕龙炙毂雕龙
- 炙阳
- 炙鱼
- 炙鸡
- 炙鸡斗酒炙鸡渍酒
- 炙鸡渍酒