王冠

摘? 要:目前常见的变电站巡检机器人遥控模块主要分为两类,一类是通过无线遥控器与机器人的主控计算机直接通信,主控机再将遥控信号下发至下位控制板,从而控制各电机并实现机器人遥控运动,此结构在主控机与下位控制板间存在通信故障时,遥控模块失去作用;另一类是将遥控模块接收端与电机连接,通过PWM信号控制电机运动以实现机器人运动,这种结构难以实现复杂的控制功能。针对上述问题,文章设计了一种可编程的遥控结构,通过遥控模块直接与机器人下位控制板通信,经试验验证,该方案在可靠性更高的前提下,也能够实现各种复杂的机器人控制操作。
关键词:遥控模块;可编程;变电站巡检机器人
中图分类号:TP242.6? ? ? ?文献标志码:A? ? ? ? ?文章编号:2095-2945(2020)21-0090-03
Abstract: At present, the common remote control modules of substation inspection robot are mainly divided into two categories: One is to communicate directly with the robot's master computer through the wireless remote controller, and then the master computer sends the remote control signal to the control board, so as to control each motor and realize the robot's remote control movement. When there is communication failure between the master computer and the lower control board, the remote control module loses its function. The other is to connect the receiving end of the remote control module with the motor, and control the motor movement by PWM signal to realize the robot movement. This structure is difficult to achieve complex control functions. Aiming at the above problems, this paper designs a programmable remote control structure, which communicates with the robot's lower control board directly through the remote control module. The experiment shows that the scheme can also realize various complex robot control operations on the premise of higher reliability.
Keywords: remote control modules; programmable; substation inspection robot
1 需求分析
本文以一種四转四驱的变电站轮式巡检机器人为例,分析该机器人对于无线遥控模块的需求。首先,考虑变电站内部环境的复杂性及其对于可靠性的要求[1],无线遥控模块应选用方便现场操作的手持式遥控器;其次,考虑机器人为四转四驱的轮式机器人,遥控模块应能够实现机器人可实现的所有操作模式[2],包括阿克曼运动模式、原地转向模式、平移运动模式、紧急制动模式等,且应当支持定速巡航、定速原地转向等可能用到的自定义功能;第三,考虑机器人安全运行等需求,遥控模块应当能够一定程度上反馈机器人本体的异常状态信息;最后,基于遥控模块本身的可靠性要求,该模块应当能够反馈自身剩余电量等状态信息,且针对传统控制器的模拟信号发生环节,例如压感按键、摇杆等,可能出现的零位漂移现象应能具有可靠的校准功能。
基于以上分析,本文选用一种可充电、可编程的手持式控制器,配合2.4G无线通信模块,实现变电站智能巡检机器人的遥控操作,本文所选2.4G无线通信模块为支持AT指令控制的JDY-40无线透传模块,电池为标称电压3.7V的聚合物锂电池。
2 功能设计
JDY-40无线透传模块可通过UART(Universal Asynchronous Receiver/Transmitter,通用异步收发传输器)串口直接与行走系统控制板及手持式控制器连接,配对完成后即可实现遥控通信。
由于遥控模块核心为可编程MCU(Microcontroller Unit,微控制单元),因此考虑将所有控制逻辑在遥控模块内部完成处理,再将处理后的控制量,通过无线通信模块发送至机器人下位控制板。
在完成MCU的初始化过程后,对程序主体环节进行循环直到关闭遥控模块电源。程序首先判断电池电量是否小于给定的低电量阈值,通过查阅相关文献[3],所选电池电压降至3.68V时,剩余电量约为10%,因此将低电量阈值定位3.68V。如果当前电压小于3.68V,使LED灯闪烁,即激活低电量报警。
接下来进行键盘按键值及摇杆X、Y轴位置值检测,根据按键值以及进行事件处理并根据摇杆位置值发送相应事件的控制指令。
最后检测串口是否有数据输入,读取数据并进行相应处理,本文设计遥控模块获取的数据为机器人本体异常信息,当获取到指定数据帧,机器人本体异常,此时遥控模块控制蜂鸣器发出蜂鸣告警,具体异常状态将上传至机器人后台。
2.1 初始化过程
为了实现远程通信功能与模拟信号的零位校准功能,应在初始化过程中添加相关环节,包括通信波特率设置、JDY-40芯片无线透传功能唤醒、AT指令控制关闭、LED指示灯激活以及模拟信号零位偏移量读取等。
通信波特率及JDY-40管脚电平根据手册按需配置即可,遥控模块摇杆的偏移量受到摇杆当前位置影响,因此初次开机时,默认中心位置,读取此时读数,即为摇杆偏移量,为了避免开机时使用人员不小心碰触到摇杆,因此该过程仅在初次开机时进行,然后将获取到的偏移量存入EEPROM(Electrically Erasable Programmable read only memory,带电可擦可编程只读存储器),每次开机时,直接从EEPROM中获取该值即可。
2.2 按键事件处理过程
为实现机器人的多种功能,遥控模块键盘应有足够多的按键或按键组合,并根据不同功能,分别将摇杆X、Y轴位置值解析为不同作用,如图1所示。
根据一般习惯,采用右手坐标系,如图2所示,机器人在阿克曼运动时的线速度、机器人转向角(机器人转向角一般选择转向时转向中心侧转向轮的偏转角度)与遥控模块摇杆有如下关系:
机器人定速巡航功能的实现,是在上述几种运动模式过程中,增设“定速”按键,当激活定速阿克曼运动与定速平移运动时,遥控模块采集摇杆位置值,仅用于调整?兹与?兹t,定速原地转向运动时,不再采集摇杆值。
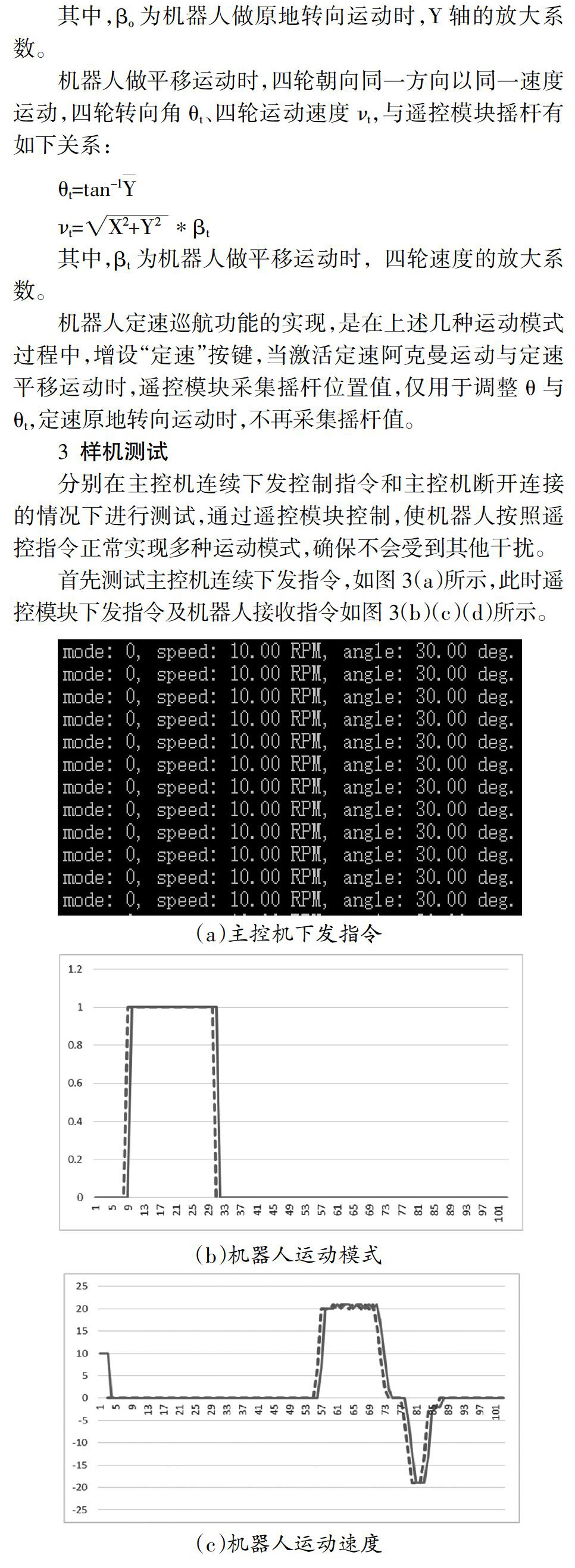
3 样机测试
分別在主控机连续下发控制指令和主控机断开连接的情况下进行测试,通过遥控模块控制,使机器人按照遥控指令正常实现多种运动模式,确保不会受到其他干扰。
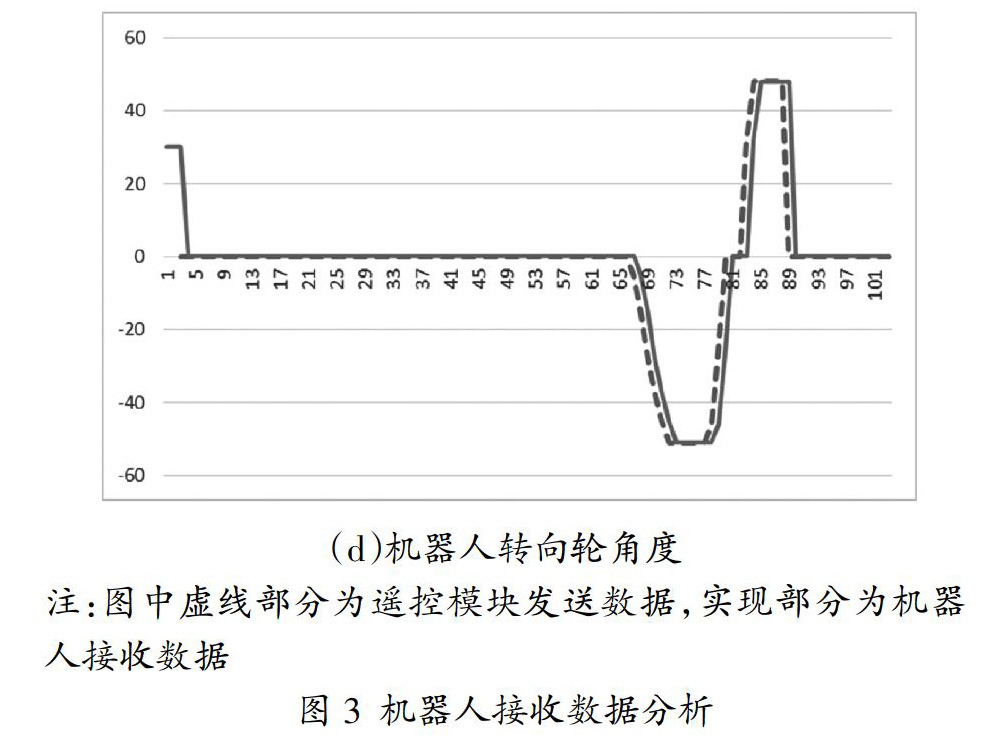
首先测试主控机连续下发指令,如图3(a)所示,此时遥控模块下发指令及机器人接收指令如图3(b)(c)(d)所示。
折线图起始部分,遥控模块处于关闭状态,此时机器人接收数据为主控机下发数据,当遥控模块打开时,完全接管机器人控制权,此时机器人能够按照遥控指令正确动作,不会受到主控机指令干扰。
然后将主控机与机器人下位控制板间连接断开,使用遥控模块对机器人进行控制,机器人依然能够按照遥控模块指令正常执行工作,因此该遥控模块可在主控机出现异常时,用于机器人应急控制。
4 结束语
本文设计的基于变电站智能巡检机器人的遥控模块,具有以下特点:
(1)直接与机器人行走系统的底层控制板进行通信,
具有最高的控制权限以及更高的可靠性。
(2)遥控模块可编程,因此可以实现各种复杂的机器人控制操作。
(3)通过摇杆零位的自动/手动校正算法,避免了传统手柄可能出现的零点漂移现象。
经试验证明,本文设计的遥控模块能够流畅控制机器人进行各种运动,可在紧急情况下用于接管机器人控制权,同时可在机器人性能测试及功能验证中发挥较大作用。
参考文献:
[1]M. Eder and A. Knoll. Design of an experimental platform for an X-by-wire car with four-wheel steering. 2010 IEEE International Conference on Automation Science and Engineering, Toronto,ON,2010,pp.656-661,doi:10.1109/COASE.2010.5584677.
[2]石世杰,丁慧.四轮全向移动机器人的运动控制分析[J].科技展望,2016,26(04):145.
[3]刘霞,邹彦艳,金梅,等.锂电池电量的动态预测[J].大庆石油学院学报,2004(02):83-85+135-136.
- 语文课导入语的设计方法
- 掌握方法 触类旁通
- 读史论今,惩恶扬善
- 2014甘肃省高考听力命题对高中英语教学反拨作用
- 浅谈提升初中数学生活化教学的有效途径
- 高中语文有效教学的几种方法
- 以诗读史
- 新课标理念下高中物理实验教学的改进措施分析
- 趣味性教学
- 浅谈初中语文教学学生自主学习能力的培养
- 论高中物理力学的生活化教学
- 浅谈初中数学教学中学生直觉思维能力的培养
- 人格之美是人生最高学位
- 浅谈初中化学实验教学中学生自主能力的培养
- 初中化学情景教学的实践设计与实现
- 引入数学史重构初中负数教学的尝试
- 高中数学作业现状及解决策略分析
- 图画在初中英语课堂教学的应用研究
- 初中英语课堂教学的图片应用
- 初中数学作业布置及批改研究
- 初中语文教学中如何培养学生的写作兴趣
- 通俗文化对于初中语文课程教学的辅助研究
- 初中化学教学中如何渗透环保教育
- 高中生物实验创新研究
- 浅谈新课改下初中生物课堂教学方法的探究
- narcissisms
- narcissistic
- narcissists
- narcistic
- narcists
- narcotic
- narcotical
- narcotically
- narcotics
- nark
- narratable
- narrate
- narrated
- narraters
- narrates
- narrating
- narration
- narrational
- narrations
- narrative
- narratively
- narratives
- narrator
- narratorial
- narrators
- 模糊,不可辨
- 模糊,不真切
- 模糊,难分辨
- 模胡
- 模范
- 模范丈夫
- 模范国会
- 模范山水
- 模范找英雄(门上贴春联)——一对红
- 模范美人
- 模范,表率
- 模表
- 模象
- 模造
- 模铸
- 模:
- 樣
- 樧
- 樨
- 樨龙
- 横
- 横一当子
- 横七竖八
- 横七竖八横三竖四
- 横三竖四