顾佳慧 陆鑫 李斌 户涛

摘 要:吉他教学机器人属于教育服务机器人(Educational ServiceRobots),是具有教与学智能的服务机器人,通常被用于进行教学辅助、初学者和兴趣爱好者自主学习、家用娱乐等主题的辅助与管理教学中。具有教学性和娱乐性。区别于机器人教育中常见的产品,吉他教学机器人具有固定的结构,一般不支持用户自行拆装。近年来,在世界各国纷纷颁布机器人和人工智能战略部署的背景下,将人工智能技术和机器人运用于教育领域的实践探索越来越多。吉他教学机器人将逐步打开市场,成为智慧学习环境的重要组成部分。
关键词:机器人创新;吉他机器人;教学机器人
1.产品介绍
随着人类社会的发展以及科技的进步,机器人越来越受到大家的追捧,其中音乐机器人最为突出。音乐机器人通过电子控制装置和气动装置控制机械结构,参照仿生学原理,达到模拟人类演奏乐器的效果,目前主要有非人形和拟人形两种形式。本产品吉他教学机器人是一个可以自动弹奏吉他和分析吉他谱的非人形机器,可实现拨弦、扫弦、击弦、勾弦、滑弦等常规操作,通过谱子的导入和选择,模拟老师教学弹奏吉他的姿态。是吉他爱好者自主学习的一款实用工具。下图为吉他教学机器人3D样品图。
吉他教学机器人是人工智能、语音识别、仿生技术的结晶,由控制系统和执行机构两部分所构成。
2.控制系统
移动控制终端设备可选择手机,手机下载蓝牙串口助手,连接蓝牙,设置按键即可操作。功能有开机、关机、重启、选择曲谱、开始、停止、速度加快、速度减小、恢复初始速度。
3.执行机构
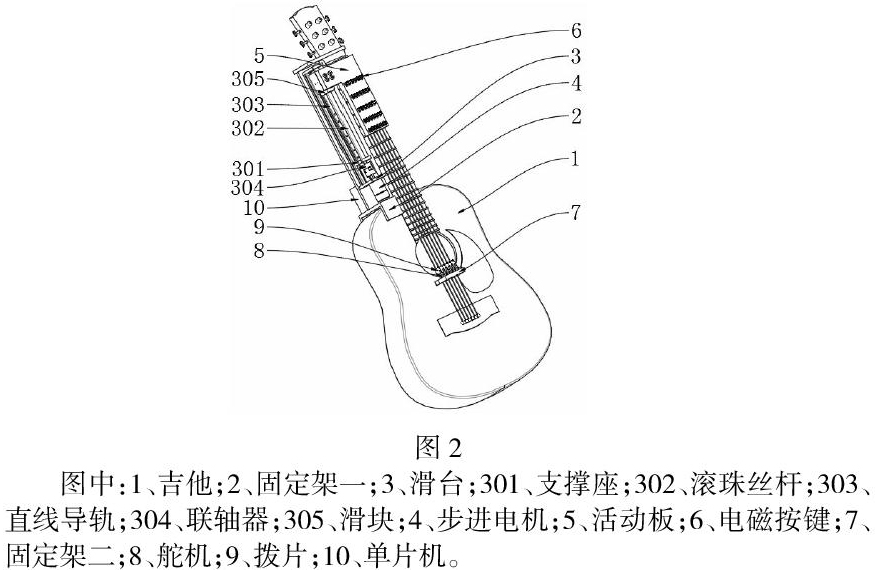
吉他1的左侧琴肩上固定安装有固定架一2的一端,固定架一2的另一端固定安装在吉他1上琴枕的外侧,固定架一2的前侧固定安装滑台3,滑台3的下端面固定安装有步进电机4,滑台3的前侧固定安装有活动板5,活动板5的内部固定安装有电磁按键6,吉他1的面板上固定安装有固定架二7,固定架二7的內侧固定安装有舵机8,舵机8的输出轴上固定安装有拨片9,固定架一2的后侧固定安装有单片机10,步进电机4、电磁按键6、舵机8与单片机10电性连接,舵机8采用mini4.3G型号,单片机10采用STM32-F407型号。
滑台3包括支撑座301、滚珠丝杆302、直线导轨303、联轴器304、滑块305,支撑座301的内部固定安装有滚珠丝杆302、支撑座301的前侧固定安装有直线导轨303,滚珠丝杆302的外侧固定安装有联轴器304,滚珠丝杆302的外侧螺纹安装有滑块305,活动板5通过螺栓固定安装在滑块305的前侧,步进电机4与联轴器304通过转轴连接,步进电机4可带动联轴器304旋转,联轴器304旋转可带动滚珠丝杆302旋转,滚珠丝杆302旋转可带动滑块305做直线运动。
活动板5的宽度与吉他1的琴杆宽度相同,活动板5的长度小于吉他1的琴杆长度,活动板5可通过滑块305在吉他1的琴杆前侧做直线运动。
电磁按键6在活动板5的内部固定安装有三十个,电磁按键6之间的距离与吉他1品格之间的距离相同,电磁按键6可以按压吉他1上的琴弦。
舵机8在固定架二7的内侧固定安装有六个,拨片9与舵机8一一对应,舵机8与吉他1的琴弦一一对齐,舵机8转动可带动拨片9进行一定角度的转动。
固定架二7位于吉他1音孔的下方,拨片9位于吉他1音孔的前侧,拨片9转动可与吉他1音孔前侧的琴弦发生接触。
4.工作原理
首先,单片机10控制步进电机4进行正传、反转,步进电机4旋转可带动联轴器304旋转,联轴器304旋转可带动滚珠丝杆302旋转,滚珠丝杆302旋转可带动滑块305做直线运动,滑块305前侧的活动板5随即移动,活动板5内部的电磁按键6受单片机10控制上下移动按压吉他1上的琴弦,舵机8通过单片机10进行一定角度转动,拨片9转动可拨动吉他1音孔前侧的琴弦,巧妙的模拟了人手指弹奏吉他的姿态。
5.产品制造
在硬件设施上,我们的吉他教学机器人外壳将采用全新的3D打印技术,可以根据用户的喜好来定制专属的产品外壳。
在软件设施上,使用UG、Solidworks等建模软件帮助客户定制外壳,使用KELL软件编写程序,使用protues进行电路设计,在电脑中对产品进行充分的模拟仿真,保证产品制作的精度,缩短产品的研发周期。
产品的外壳采用3D打印常用耗材PLA,电路板采用标准覆铜板印刷,吉他教学机器人外壳的制作需要3D打印机、激光雕刻机、数控机床进行加工。电路板制作设备需要PCB板印刷机、PCB板贴片机等。
6.总结
从现在吉他机器人的发展现状看,利用该教学机器人帮助学生学习吉他,不但有利于发挥教育机器人功能,又能满足不同水平,不同年龄的学生学习吉他的需求。目前我们已经取得了阶段性的胜利,在研发和生产方面,我们成功研发出吉他教学机器人并迅速投入生产,生产流程与我们前期预想一致,十分顺利。销售方面,我们运用了多种营销手法,如新零售和精准营销等,成功的将我们的吉他教学机器人推向了市场。
参考文献:
[1]吴健荣.教学机器人本体设计及关键技术研究 [D]哈尔滨工程大学,2007
[2]前瞻产业研究院.我国教育机器人市场规模,2019,(19):120-121.
[3]李劲松.教学机器人在现代实验教学中的应用 [D].上海交通大学,2004.
指导老师:纪国涛
项目编号:202010144017
大学生创新创业训练计划资助
(沈阳理工大学)
- 踏创新小径寻小学语文课改之幽
- 浅谈对外汉语教学中的文化教学
- 新时期小学语文作文教学的思考
- “质疑探究、合作讨论”阅读教学模式的运用
- 基于互联网环境下的小学语文分级阅读方法分析
- 探究教育技术在小学语文课堂教学中的应用
- 怎样在高中语文教学中培养学生语文核心素养
- 小学语文情境化课堂识字教学方法的思考
- 多媒体影视资源在语文教学中的巧妙运用
- 小学语文“核心素养”的内涵及其实现路径
- 基于核心素养的语文阅读教学策略
- 浅析初中语文教学中培养学生核心素养之策略
- 浅析新媒体环境下中专语文教学的延展与创新
- 艺术渗透助力学生语文核心素养的培养
- 基于核心素养的初中语文阅读教学研究
- 指向核心素养发展的小学语文阅读教学
- 花开两朵,各表一枝
- 高中语文整本书阅读指导任务与策略分析
- 传记类整本书阅读教学内容与策略
- 分析课外阅读在小学语文作文教学中的重要性
- 孔门教育叙事研究
- 小学语文课内外阅读整合的有效策略
- 语文教学中“跨媒介阅读与交流”理念的融合创新研究
- 浅谈课外阅读在小学语文教学中的作用
- 探究当下畅销小说整本书阅读的教学策略
- the opposition
- the optimum
- theorem
- theorematically
- theorematic, theorematical
- theorematist
- theorems
- theoretical
- theoretically
- theoretician
- the orient
- theories
- theorise
- theorised
- theorises
- theorising
- theorist
- theorists
- theorization
- theorizations
- theorize
- theorized
- theorizer
- theorizers
- theorizes
- 懒待 懒怠
- 懒得
- 懒得刮
- 懒得听
- 懒得理
- 懒得砍木料的人爱去量树,懒得讲理的人只得赌咒
- 懒得,不想
- 懒心无肠
- 懒忙
- 懒怠
- 懒怯
- 懒惰
- 懒惰一时,损失一生
- 懒惰促人老,勤劳可长寿
- 懒惰奢侈
- 懒惰怠慢
- 懒惰懈怠
- 懒惰成性,坐享别人劳动成果
- 懒惰放荡
- 懒惰散漫
- 懒惰散漫成性
- 懒惰玩忽
- 懒惰的人
- 懒惰的马路程远,吝啬的人朋友远
- 懒惰而不知自加爱惜