于淼淼 史磊 周嬉嬉 王蕊
摘 要:人工蜂群算法是一种群体性智能性算法,在解决复杂优化问题的过程中,有着非常显著的效果,而且算法本身的设置参数较少,鲁棒性较强,将其应用到调度问题中,能够实现资源的优化配置,促进生产效率和生产水平的提高。本文对人工蜂群算法的原理、特点进行了分析,并就其在调度问题中的应用进行了探讨。
关键词:人工蜂群算法;调度问题;应用
前言:在生产及管理领域,调度问题呈现出复杂性和实时性特征,传统的调度算法无法很好的满足现实需求,难以取得令人满意的结果。基于此,越来越多的研究人员开始将目光放在群体智能算法的研究方面,人工蜂群算法就是其中一种,其能够有效的应对复杂的生产调度问题,相比传统算法有着更好的寻优搜索能力,可以很好的寻找到全局最优目标。
1 人工蜂群算法概述
人工蜂群算法是一种基于蜂群采蜜过程的群体智能算法,主要是模仿蜜蜂群采蜜时对于蜜源的侦查、跟随采蜜、蜜源选择以及跳舞传递信息等行为,能够实现对于目标的有效搜索。人工蜂群算法的模型简单,无论是控制还是实现都十分方便,也因此受到了研究人员的关注。
1.1算法原理
在人工蜂群算法中,食物源的位置代表了等待优化问题的一个可行解,对于最优解的求解过程,体现在算法中,就是寻找较高收益度食物源的过程。初始化阶段,随机生成的食物源表明存在和食物源数量一致的随机可行解,可以将其表现为
其中,xi表示D维向量,代表了某个食物源的位置,F(xi)则表示每一个xi所对应的目标函数,能够决定xi的好坏,SN表示食物源的数量。
在完成初始化之后,为了能够最优食物源,蜂群会重复三个阶段的动作,第一是雇佣蜂阶段,主要是通过运算的方式,获得相应的邻域内蜜源,将自身处处蜜源与该蜜源的适应度数值进行对比,选择其中的可行解,并且对适应度值进行记忆;二是跟随蜂阶段,其能够通过相应的摇摆舞实现与雇佣蜂之间的信息传递,在接收到相应的信息后,可以依照食物源本身的富足程度,对蜜源进行选择;三是侦查蜂阶段,若雇佣蜂提供的蜜源信息良好,跟随蜂会募集更加大量的雇佣蜂来参与蜜源采集,反之,则该蜜源会被放弃,雇佣蜂也会转变为侦查蜂,并且重新随机选择新的食物源进行侦查。
1.2算法特点
人工蜂群算法的特点体现在几個方面:一是正负反馈机制。不同阶段,正负反馈机制有着不同的作用,例如,雇佣蜂阶段,正反馈机制可以对系统的进化方向进行引导,使得其能够逐步得到最优解,有助于获得较快的算法收敛速度;侦查蜂阶段,负反馈机制的存在,使得群体能够保持良好的创新能力,允许存在一定的退化误差,这样能够规避早熟收敛的问题;二是分布式计算。在人工蜂群算法中,所有蜜蜂的对于食物源的搜索行动都是独立进行的,可以借助相应的信息交流与传递,实现彼此协作,获取最佳的解决方案;三是良好的鲁棒性。对比传统算法,人工蜂群算法对初始路线并没有很高的要求,也不需要对相应的先验信息进行明确,换言之,就是算法得到的求解结果与初始路线并没有直接关联,在进行搜索的过程中,也不需要进行干预和调整。当然,人工蜂群算法同样也存在一定的缺陷,即侦查蜂在对新的路径进行探索的过程中,做出的选择具有很强的随机性,会导致算法出现过慢收敛,可能出现局部最优的情况。
2 人工蜂群算法在调度问题中的应用
在传统的调度问题处理中,采用的一般都是启发式算法,而新时期,伴随着群智能算法的兴起,更多的研究人员开始试图利用群智能算法来对调度问题进行解决,比较常见的算法除了人工蜂群算法,还有蚁群算法、粒子群算法以及遗传算法等,而对比其他三种算法,人工蜂群算法在对连续空间数值优化问题进行解决时,有着更加明显的优势,不过常规意义上的人工蜂群算法在面对排列组合优化问题时,表现出了一定的不足,需要对其进行适当优化。
2.1算法改进
一是对初始化进程的改进,以作业车间调度为例,对算法进行初始化,将与雇佣蜂数量相同的调度方案作为初始蜜源;二是搜寻方法的改进,通过对某个工件中其中一道加工工序加工设备的改进组合来形成邻域,考虑到加工顺序的约束,需要在加工顺序改变后,对新解的可行性做出判断;三是适应度计算的改进,通过对调度过程的解析,计算出能够对调度方案优劣进行评估的数值,依照具体调度目标选择相应的数据信息,对适应度进行计算。
2.2算法应用
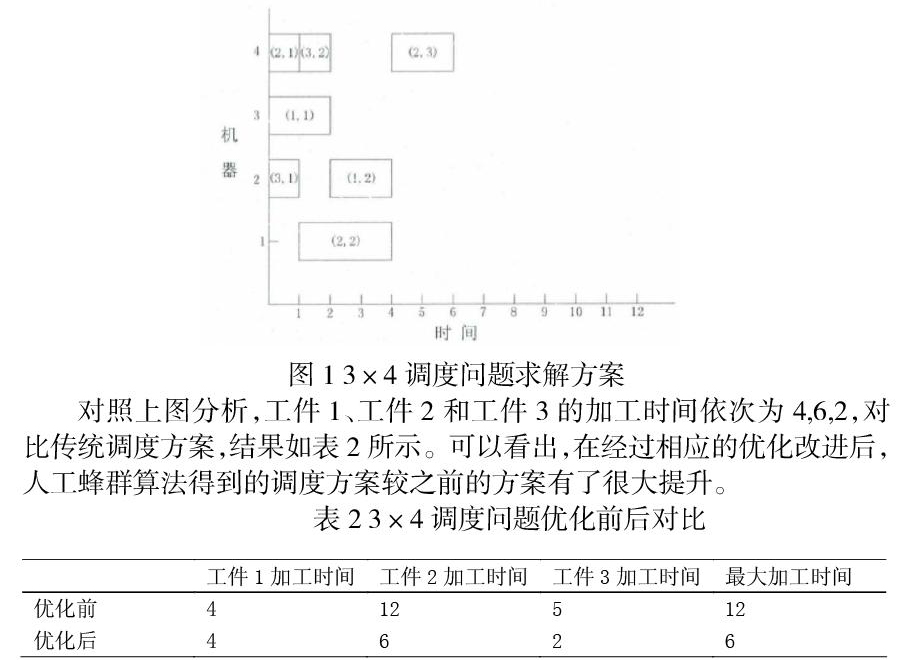
以3×4的作业车间调度问题为例,具体描述如表1所示。
在上表中,J表示工件,M表示机器,JO表示工序步骤,后续的数字表示某台机器加工某个工件工序所需的时间,0表示机器无法对该工件的该工序进行加工。
这里将寻优目标设定为工件平均加工时间最小,则在对改进后的人工蜂群算法的相关参数进行设置时,将蜜蜂种群的数量设置为20,最大迭代次数100,经过相应的分析计算,得到的最佳调度方案为
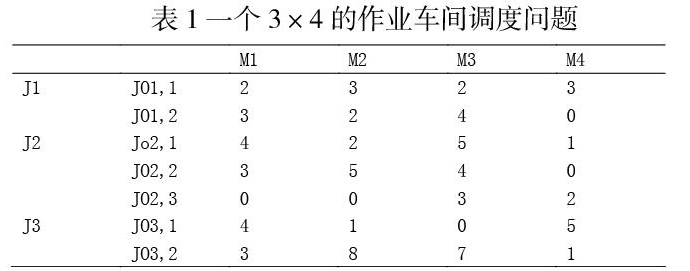
{(2,1,3),(3,1,2),(2,2,1),(3,2,4),(2,3,4),(1,1,3),(1,2,2)}
最小的平均加工时间为4,算法计算用时约为0.5352秒,依照算法得出的调度方案,绘制相应的甘特图,如图1所示。
对照上图分析,工件1、工件2和工件3的加工时间依次为4,6,2,对比传统调度方案,结果如表2所示。可以看出,在经过相应的优化改进后,人工蜂群算法得到的调度方案较之前的方案有了很大提升。
3 结语
总而言之,作为一种比较新颖的群体智能优化算法,人工蜂群算法的计算简单,控制参数较少,而且鲁棒性强,在实践中容易实现,能够对一些复杂的问题进行优化。将人工蜂群算法应用到调度问题的解决中,能够获得最佳的调度方案,提升调度的有效性。不过也需要认识到,人工蜂群算法在实际应用中也容易陷入局部最优的状况,需要有关人员做好理论研究工作,提升算法的适用性,在降低算法复杂度的同时,保障算法的收敛效果,对其应用领域进行拓展,得到更加符合实际应用需求的人工蜂群改进算法,将人工蜂群算法的应用价值切实发挥出来。
参考文献:
[1]郑友莲,雷德明,郑巧仙.求解高维多目标调度的新型人工蜂群算法[J].计算机科学,2020,47(07):186-191.
[2]郑小操,龚文引.改进人工蜂群算法求解模糊柔性作业车间调度问题[J].控制理论与应用,2020,37(06):1284-1292.
[3]张松.人工蜂群算法研究及其应用[D].西安电子科技大学,2019.
作者简介:
于淼淼 (1986-)女,辽宁大连人,硕士学历,助理工程师,从事通信、大数据相关方面研究
(中国人民解放军31436部队 ?辽宁 ?沈阳 ?110000)
- 促进江苏实施乡村振兴战略的财政政策研究
- 农业产业化发展助力乡村高质量发展研究
- 农村居民消费潜力分析
- 乡村产业振兴投融资模式创新与产业提升机制设计
- 济南市自贸区金融创新路径研究
- 医药企业并购估值研究
- 比较金融制度:中国政策保险民营化
- 欠发达地区发展普惠金融的策略
- 商业银行个人理财业务风险防范
- 供给侧改革背景下中小企业融资问题研究
- 纾解科技型中小企业融资难
- 发展中国家与发达国家在全球金融治理中的博弈
- 商业银行反洗钱主动合规的“势”与“行”
- 亏损增加值核算:投入产出表再调整
- 北部湾经济区创业型中小企业人力资源管理新探索
- 新时代江津区生活服务业发展对策
- 优化四川省营商环境的路径研究
- 加快推进社会治理现代化
- 发达国家新经济监管的六点经验做法
- 强化特色产业培育 推进城市能级提升
- 探索建设中医药健康城创新中医药国际化路径
- 以可再生能源和能源物联网为抓手推进绿色“一带一路”建设
- 新形势下我国对外投资的战略思考
- 防范化解易地搬迁后续风险的对策建议
- 2020年后减贫新策略
- distribution centre
- distribution chain
- distributionchain
- distribution channel
- distributionchannel
- distribution channel
- distribution/delivery/dispatch/logistics
- distributionist
- distributions
- distributist
- distributor
- distributor-bars'
- distributors
- distributorship
- district
- districtattorney
- district attorney
- district attorney/d.a.
- district-attorneys'
- district attorneys
- districted
- districting
- districts
- distrust
- distrusted
- 稷契
- 稷契皋陶
- 稷狐
- 稷狐社鼠
- 稷稷
- 稷蜂
- 稷蜂社鼠
- 稷雪米雪
- 稸
- 稸积
- 稹
- 稺
- 稻
- 稻、麦、甘蔗等植物发育的时候,在幼苗靠近土壤的部分生出分枝
- 稻、麦、谷子、高粱、玉米等作物的统称
- 稻、麦、谷子等子实上脱下的皮或壳
- 稻叶蝉
- 稻和菽
- 稻地
- 稻地里盖猪圈——肥水不落外人田
- 稻多打出米来,人多讲出理来
- 稻子
- 稻子去了皮
- 稻孙
- 稻属