孙移 孟昭军 张雪春 车玉卓 初淇然
摘要:以博创尚和机器人为硬件平台设计一个能够自主登上6cm高的大擂台然后在台上与敌方对抗,当机器再次掉下擂台时,机器能够检测到自身情况并迅速进行对准并登台的机器人。
关键词:格斗机器人;自主机器人;电调散热
1引言
项目中,最重要就是机器人能够检测自己是在擂台上还是在擂台下,当机器在擂台下时,能够进行登台动作,其次便是登上擂台后的对抗环及防止掉下擂台过程。在项目中对驱动模块进行改进研究
2.1 项目流程与功能分析
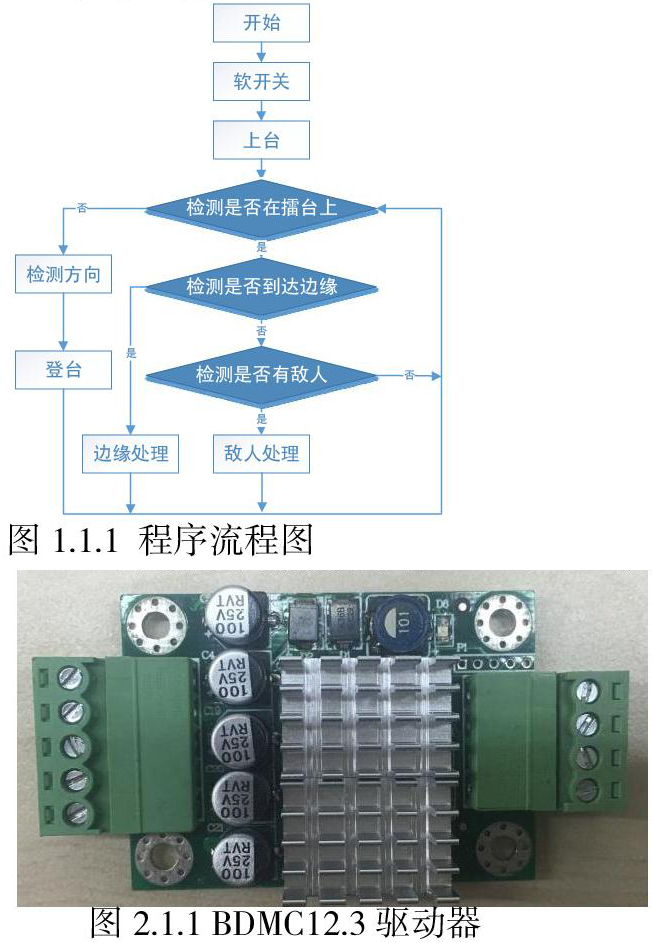
由项目整体运行流程的可行性,得到以下的运行流程:
SP① 机器人位于起点并检测开始信号然后启动上台运动;
SP② 机器人采用传感器检测台上周围信息;
SP③ 机器人根据检测信息判断运行走向及速度以及是否需要登擂台;
SP④ 机器人的运行机构完成设定的走向、速度和动作;
SP⑤ 采用周期性控制,机器人返回SP②,循环运行。
以上流程所涉及到的功能需要由感知、控制、执行三个模块完成。 ① 控制模块:合理的运动设置;(SP③、SP⑤)
② 感知模块:信息采集;(SP②)
③ 执行模块:s各关节配合运动至定点。(SP④)
2.2 技术提取与任务分解
完成项目要求,机器人必须实现各个模块所涉及的新知识与技术:
① 控制模块
FN① 运动状态分析;
② 感知模块
FN②检测传感器的选择与使用;
③ 执行模块
FN③:运动及动作控制。
分任务有:
① 轮式机器人运动控制(实现FN③):在机器人套件的基础上,搭建轮式机器人并搭载相关舵机结构,对运动效果进行测试以及改进;
③ 简易扫描平台(實现FN②):掌握光电传感器、测距传感器以及灰度传感器的应用,搭建扫描平台,实现检测敌人以及判断方位的功能;
④ 机器人的设计与制作(实现FN①):根据示例的项目要求以及比赛规则设置自己机器人,利用之前分任务实现的功能与技术,完成综合项目的设计制作与实现。
2.3 程序逻辑
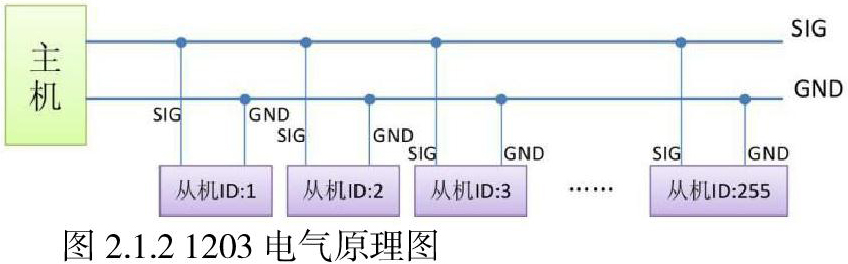
3博创尚和机器人平台BDMC1203驱动电调原有配置
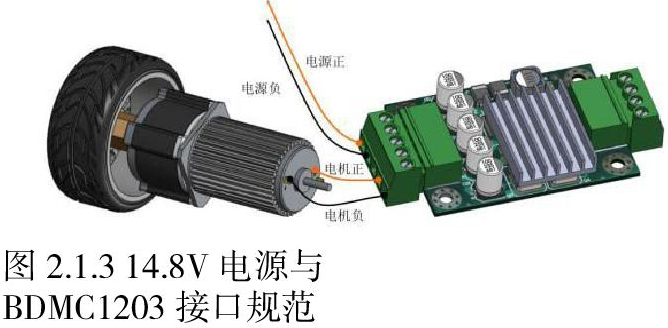
BDMC1203驱动器采取半双工异步串行总线通讯方式。
BDMC1203 和控制器的接线如下所示。
4.1博创尚和机器人平台BDMC1203驱动电调改进散热模块设计
4.2散热模块设计背景
我们在研究电机驱动模块的时候,研究发现现在成型的无刷电机驱动电调仅适用于无人机,对于格斗机器人,因其工作特性,电机在对抗中堵转导致电调过流发热,现有的小型电调没有良好的散热系统,极易烧毁,基于博创尚和格斗机器人硬件上用的电调BDMC1203,没有好的散热措施!极易烧毁,所以我们在此基础上改进
4.3散热模块设计过程
我们考虑到需要做一个温控的风扇,把电池和风扇结合起来,要能保证其体积,控制在可用范围内。因此加装了温度传感器,让其能够检测到对抗中驱动模块忽然上升的高温,并对其迅速的作出反应,提高风扇电压,提升散热效率
4.3散热模块设计结果
我们设计了一种带独立电源的小型散热模块,具有高稳定性,高爆发力,小体积等优点
5 总结
经过三代的优化,又经过第4代的改进,加上双面软胶让其能够固定在各种各样的平面,这样无论是给格斗机器人充电时电池发热,还是上擂台对决,都能让其稳定工作,减少电调烧毁电池过热爆炸这类事故的发生
参考文献
王军.基于能力风暴智能机器人平台的足球机器人改进设计[J].工业控制与应用,2010,29(9):24-28
项目基金:2020年辽宁省大学生创新创业训练计划项目资助,项目编号:202011430012
- 基于主题语境的高中英语听力教学策略
- 核心素养下的小学英语教学策略探析
- 浅谈“泰微课”在英语课堂中的应用
- 例谈思维导图在阅读教学中的运用
- 自然拼读法在小学英语语音教学中的运用
- 人工智能在初中英语教学中的有效应用
- 教学创生视角下的高中英语有效写作教学策略探讨
- 学生自学能力的培养
- 基于核心素养的高中英语读写结合教学模式分析
- 高中英语阅读教学设计思政化
- 高中英语课堂基于文本语言特点分析的“以读促写”探索
- 中职英语课堂师生互动探究
- 浅谈大学英语教学中中国文化的导入
- 浅探中职英语课堂教学策略
- 核心素养视角下中职英语教学策略探究
- 课程思政理念下外语教学模式研究
- 中职学生英语学科核心素养的培养
- 浅谈微课在大学英语教学中的应用
- “具身认知”指导下的高职英语有效教学实践研究
- 高职英语在线教学探索与思考
- 中职英语合作学习模式的分析运用
- 高职英语课程思政的实施途径探索
- 浅谈空乘专业英语口语教学中加强文化导入对减少语用失误的重要性
- 分层教学在中职英语教学中的应用探究
- 国内英美文学慕课建设评议
- canvas
- canvased
- canvasers
- canvases
- canvasing
- canvaslike
- canvass
- canvassed
- canvasser
- canvassers
- canvasses
- canvassing
- can wrap/twist sb round your little finger
- can wrap/wind sb around your little finger
- canyon
- canyoning
- canyonings
- canyons
- can you tell me the way to/do you know the way to
- can²
- can³
- can¹
- can’t
- c.a.p.
- cap
- 烘拢
- 烘明
- 烘晕
- 烘染
- 烘档码子
- 烘火
- 烘炉燎发
- 烘炉里的王八——干鳖
- 烘炙
- 烘烔
- 烘烘
- 烘烤
- 烘焙
- 烘焙机
- 烘焙鸡
- 烘然哄哄
- 烘的咯咯儿
- 烘笼
- 烘箱
- 烘篮
- 烘腾腾
- 烘苗
- 烘衬
- 烘赞曲
- 烘霁