宋韬

摘 要:机场净空保护区范围内障碍物的大地坐标及高程信息是对保护区进行规划和管理的重要依据。根据保护区内障碍物的自身特点及观测精度需求,推导了基于“前方交会”和“三角高程”原理的障碍物平面坐标及高程观测方法,并通过对观测结果的合理定权实现了对无观测标志的障碍物顶端平面坐标及高程的精确测量,然后通过坐标转换原理实现了基于跑道入口直角坐标系到高斯投影坐标系和大地坐标系统的转化,在实际工作中具有一定实际应用价值。
关键词:机场净空区;大地坐标;坐标转换;三角高程
机场净空区是为保证飞机在起飞、着陆及复飞阶段的飞行安全,而在机场周边一定范围内划定的限制地物和地貌高度的空间区域。机场净空区由升降带、端净空区和侧净空区三个部分构成。
在机场净空区内的障碍物(如信号基站、烟囱、水塔、高大植被等)种类和数量繁多,对于飞机的起降及复飞等飞行活动存在着潜在的风险。
因此,及时对净空区内的障碍物进行较为精准的观测,得出其平面位置及高程信息,并以此为依据对机场净空区进行管理和规划就显得尤为重要。
在机场净空区内,大部分障碍物都具有如下特点:
1)障碍物的分布较为孤立和分散;
2)难以实现在高大障碍物的顶端安置反光片、棱镜等距离观测目标;
3)障碍物附近较为空旷,通视条件良好。
因此,对于障碍物的观测,如果利用全站仪或实时动态差分GPS(GPS-RTK)进行传统的平面坐标及高程测量,在实际工作中难以实现且工作量巨大。但是,如果利用几何学基本原理,以地面已知点为基准,仅通过水平方向和垂直角度的观测是能够在保证精度的前提下得出远处障碍物平面坐标和高程等信息的。
1 大地坐标与高程
机场净空区障碍物的平面位置观测是以大地坐标作为测量基准的。所谓大地坐标,是指以参考椭球面为基准面所定义的坐标系统。它包括大地经度(L)、大地纬度(B)及大地高(H)。如下图所示,大地经度是过某点的子午面与起始子午面之间所夹的二面角L大小;而大地纬度是过该点相对于参考椭球的法线与赤道面的夹角B;大地高是沿该点的法线方向到参考椭球面的距离H。
由于机场跑道及周边障碍物标高并非采用以参考椭球面为基准面的大地高,而是以大地水准面为基准的正高,也称为绝对高程。即:某点沿铅垂线方向到大地水准面的距离。
综上所述,机场净空区障碍物的平面位置用基于参考椭球面的大地经度、大地纬度表示,而障碍物标高采用以大地水准面为基准的正高或绝对高程。
2 控制点坐标测量
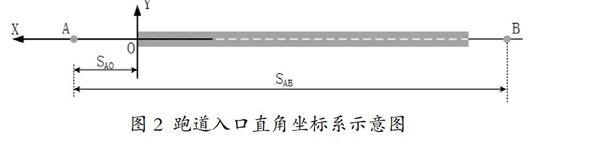
可以作为障碍物观测上级控制点的点位必须与机场净空区的周边范围通视条件良好,且点位的平面位置及高程较高。为了能够反映障碍物与机场跑道中心延长线之间的相对位置关系,往往首先建立跑道入口直角坐标系(如图2,并以此坐标系为基准,对目标点坐标进行观测。
如上图所示,跑道入口直角坐标系以跑道入口的中点O为坐标原点,X轴与跑道中线的延长线方向一致,跑道入口之前为正,之后为负;Y轴与其构成平面直角坐标左手系。对跑道入口直角坐标系的观测步骤如下:
1)如图,在位于机场跑道两端的中心线延长线上,分别设置控制点A、B;
2)利用全站仪、对中杆和棱镜测得控制点A与跑道入口中点O之间的水平距离SAO及A、B两点间的水平距离SAB,则A、B两点坐标为:A(SAO,0),A(SAO-SAB,0);
3)通过水准仪与上级水准控制点联测,得到A、B两点高程H正A和H正B 。
4)对于特定工程项目,当需要3个或以上的上级控制点时,可通过“导线”或“三角网”的方式对上级控制点加密。
3 前方交会测量
对于机场周边难以在顶端设置观测标志的障碍物优先选择前方交会测量方法。如图3所示,A、B两点为已知的上级控制点坐标,P点为待观测的障碍物顶点。
在A点架设全站仪,B点设置观测标志,用测回法观测得到水平角∠PAB的大小a,同理可测得∠PBA的大小b。根据△PAB中A、B点坐标及水平角大小a、b,未知点P的平面坐标(XP,YP)推导如下:
由已知点A、B坐标可得AB坐标方位角?琢AB:
根据正弦定理可得,A、P两点间的水平距离:
因此,可得P点平面坐标计算式为:
4 平面坐标转换
当需要得出障碍物顶点所对应的大地经纬度时,就需要先将之前在跑道入口直角坐标系下的坐标转换到高斯投影坐标系下,并利用大地坐标反算原理得到该点的大地经纬度。
设A、B两个上级控制点在跑道入口坐标系下的坐标分别为(XA,YA)和(XB,YB),而通过GPS观测或与其它控制点联测,可以得出它们基于高斯投影坐标系的坐标为:(XA′,YA′)和(XB′,YB′)。则可根据两套坐标系统下控制点的坐标值得出两套坐标系的三个坐标转换参数:旋转参数?琢和平移参数?驻X、?驻Y:
根据坐标转换参数,可求得障碍物顶点P在高斯投影坐标系下的坐标为:
然后,通过大地坐标反算原理,即可得到P点的大地经纬度:(BP,LP)。
5 三角高程测量
在确定障碍物顶端的平面位置后,即可利用三角高程原理观测障碍物顶点高程。
如上图所示,A为上级控制点,其平面坐标(XA,YA)及高程HA均已知。iA为仪器高,SAP为控制点A和障碍物顶点P间的水平距离,?茁为仪器中心和P点间的竖直角,则A、P两点间高差hAP为:
从而,可根据HA得出从控制点A处测量得到的P点高程HP′。同理可以通过在另一控制点B架设仪器,得出B、P两点间高差hBP,进而得出P点高程HP″。以控制点到障碍物水平距离的倒数为权,对P点的两个高程值做加权平均,得出P点高程中数,即为障碍物顶点的最终高程值。
6 总结
针对机场净空障碍物的实际特点,本文提出了通过建立跑道入口直角坐标系,并以此为基础,通过“前方交会”和“三角高程”测量,无需在障碍物顶端设置观测标志即可完成平面位置及高程的测量与计算工作,并利用三参数坐标转换,将基于跑道入口直角坐标系的坐标转换为高斯投影坐标和大地经纬度坐标,从而适应基于不同用途和坐标基准的障碍物评估工作。这在机场净空区障碍物评估前的实际数据采集工作中具有一定的实际应用价值。
参考文献:
[1] 马玉凡,王卫安.机场净空限制计算模型及可视化研究[J]. 测绘工程,2008,01:32-36.
[2] 刘晓军,种小雷,蔡良才,邵斌.机场净空区超高障碍物风险性分析[J].基建优化,2007,06:184-186.
[3] 姜楠.坐标转换算法研究与软件实现[D].安徽理工大学,2013.
[4] 牛丽娟.测量坐标转换模型研究与转换系统实现[D].长安大学,2010.
[5] 张智韬,黄兆铭,杨江涛.全站仪三角高程测量方法及精度分析[J].西北农林科技大学学报(自然科学版),2008,09:229-234.
[6] 郭振平.两点前方交会的精度分析[J].轻金属,2005,12:6-9.
- 地勘单位合同管理面临的问题及措施分析
- 装配式建筑工程造价预算与成本控制问题探析
- 浅谈地下综合管廊PPP项目实施关键点与运营管理
- 装配式结构施工房建项目成本管控探析
- 海工项目计划编制与管理
- 项目工程造价管理存在的问题及应对方法
- 浅析化工安全生产与管理
- 海外公路工程施工管理探析
- 现代企业精益班组管理探索实践
- 国有企业干部人事管理体制中存在的问题及改革策略
- 城市轨道交通集中UPS电源系统设置方案研究
- 浅谈安全创新技术设备在铁路集装箱专用门吊运用的必要性
- “匠师工程”在制造企业的实践
- 试论仪器分析技术在油品分析中的运用
- 大型车辆前方路况识别显示系统
- 简述石油化工工业废水的处理工艺
- 纯电动汽车动态电平衡设计研究
- 城市轨道交通牵引供电系统谐波分析
- 提高房建土木工程质量的措施研讨
- 试论可再生能源技术在绿色建筑中的应用
- 试析提高煤炭货运铁路接触网的安全性和可靠性的措施
- 刍议新收入准则实施对上市公司的影响及应对策略
- 石油化工专业群顶岗实习问题及对策研究
- 关于培育锻炼青年人才的几点想法
- 广播电台播音主持人个性化主持风格的培养策略
- get better
- get bigger
- get bogged down
- get, bring, etc. sth to market
- get broken
- get/buy sth on credit
- get-by
- get by
- get by in
- get by on
- get by (on/in/with sth)
- get by with
- get carried away
- get/catch a whiff of sth
- get caught up in
- get changed
- get cleaned up
- get cold/colder
- get cold feet
- get/come to the point
- get cracking
- get cut off/get disconnected
- get divorced
- get down
- get-down
- 野艾
- 野芜
- 野花
- 野花上床,家败人亡
- 野花不种年年有,烦恼无根日日生
- 野花攒地出
- 野花莫攀,野猪莫赶
- 野芳
- 野茄
- 野茬儿
- 野草
- 野草丛木杂生之地
- 野草丛生
- 野草丛生的地方
- 野草塞路而难于通行
- 野草无根不会长
- 野草闲花
- 野草闲花闲花野草
- 野草难肥胎瘦马,横财不富命穷人
- 野荒
- 野荒民困
- 野荒民散
- 野莽
- 野菊
- 野菜