侯娜

摘 要:现今以IT平台为依托,大数据为依据,通过不断完善管理和优化程序,提升运营水平已成为主要趋势。本文首先分析地铁站机房智能巡检机器人系统的方案设计,然后探讨系统硬件电路设计和系统软件设计,以期为地铁站机房智能巡检机器人系统的应用提供参考。
关键词:智能巡检机器人;地铁机房;磁导航系统;模块化设计
中图分类号:TP242;TP308文献标识码:A 文章编号:1003-5168(2018)32-0029-03
Design and Application of Intelligent Inspection
Robot for Subway Station Room
HOU Na
(China Railway Seven Bureau Group Electrical Engineering Co., Ltd.,Zhengzhou Henan 450000)
Abstract: Nowadays, based on IT platform and big data, it has become the main trend to improve the operation level by constantly improving management and optimization procedures. Firstly, this paper analysed the scheme design of the intelligent patrol robot system in the machine room of the Metro station, and then discussed the hardware circuit design and software design of the system, in order to provide reference for the application of the intelligent patrol robot system in the machine room of the Metro station.
Keywords:intelligent patrol robot;subway engine room;magnetic navigation system;modular design
1 研究背景
通常鐵路配电室、配电所、继电柜室、机房等采用7×24h专人值守的方式,工作人员需按时巡查机房基础设施,并对基础运行数据进行检查核对分析。这种耗时费力的方式,导致工作效率低下,巡检标准化程度也相对难以得到保证。机房设备数量大、类型多,需要巡检人员具有相当的专业知识背景,新进人员必然需要相当的时间进行培训和实习,而地铁站数量繁多且不断增加,现有熟练工种数量往往跟不上高速发展的需求。而提高监测手段、提升综合管控效率,引进智能巡检机器人必将成为解决这一问题的最佳方案。
应用于铁路及地铁站室内工作区(机房、继电柜室、配电室及配电所等)的巡检机器人:拥有可升降1.8区间并360°任意水平角度旋转的红外热成像和高清视频双视结合技术的机头;采用全模块化高封闭式机器人,无需维护,全自动化充电、自动化作业,出现问题部件可直接更换相应模块,简单快捷高效,且可以自由添加开发各种新功能;能按照提前规划的巡查线路自主行走;可以对机房各类数据分别搜集并集中处理,定期对各种设备仪表进行巡检,集中排查,发现故障后及时通知后端处理并记录,也可以对接机房出入管理系统,部分替代人工随工监督。很多原本需要人工处理的工作,被智能巡检机器人系统取代后,不但节省了人工成本,还避免了漏检、检测不仔细等情况,从而实现机房管理自动化。
这些看似简单的功能,想要通过机器人全部完美实现并没有想象中那么简单。而相对地铁机房工作的特殊要求,机器人需要进行更复杂、更精细的工作。比如,机器人需要在结构复杂的机房中自如穿行,并达到一定的移动速度,机房工作人员往来,通道宽度有限,机器人需要对运动物体有良好的避障能力[1]。
2 系统方案设计
此方案先期模拟规划城际场信号继电器区和京广场信号继电器区的机器人(自动/手动遥控)巡检任务。配置1~2台巡检AGV和1套自动充电桩,巡检AGV机器可每天自动巡检并将巡检情况报送至上位机,也可手动控制AGV巡检机器人去检查某个位置的继电器柜工作情况。AGV巡检机器人配置可升降摄像装置,当需要检查对面电器柜工作情况时,机器人摄像装置自动旋转一定角度实现拍摄功能。机器人磁轨路径规划见图1。
该继电器智能巡检机器人对继电器柜室内外设备进行自主巡检与数据采集;机器人室便于为机器人提供充电及储存;通过无线通信系统,将巡检数据实时传输至本地监控后台,完成数据的分析处理及预警、告警等功能;通过远程集控后台实现系统远程集控管理。
3 系统硬件电路设计
对智能循迹机器人系统进行模块划分,将系统分为主控系统、电机驱动模块、速度控制检测模块、电源管理模块、图像采集模块、存储及显示模块,对各个模块进行器件选型及相应的硬件电路设计。
其中,电机驱动模块选用德国MOTEC 100W直流伺服+驱动器+CANopen通信。该直流电机驱动器件具有很高的集成度,能提供足够的输出能力,同时在能耗和运行性能方面具备良好的优势。CANopen通信的信号驱动具有诸多优势:①物理层非常稳定;②数据链路层可靠,因为相比其他所有总线,只有CAN可以达到汉明间距(Hamming Distanz)为6,能检测报文里多达5个随机引入的位错误及15位突发性错误;③灵活,兼容性高;④可互操作性高;⑤CAN产品尺寸小,节省空间;⑥支持冗余备用。
作为智能机器人“眼睛”的图像采集模块,关键作用是要获取更多质量好的路况信息。
数字图像采集方法是利用大分辨率数字摄像头直接输出数字信号,直接读取传感器的数字输出。
电源电路模块的设计对整块电路的供电是否稳定起着决定性作用,除了要分别为各个电路提供稳定的电源电压外,同时也需要防止受到自身电路和其他电路的噪声干扰和电磁干扰。含固定频率振荡器和基准稳压器,并具有完善的保护电路、电流限制、热关断电路,输出电压稳定。
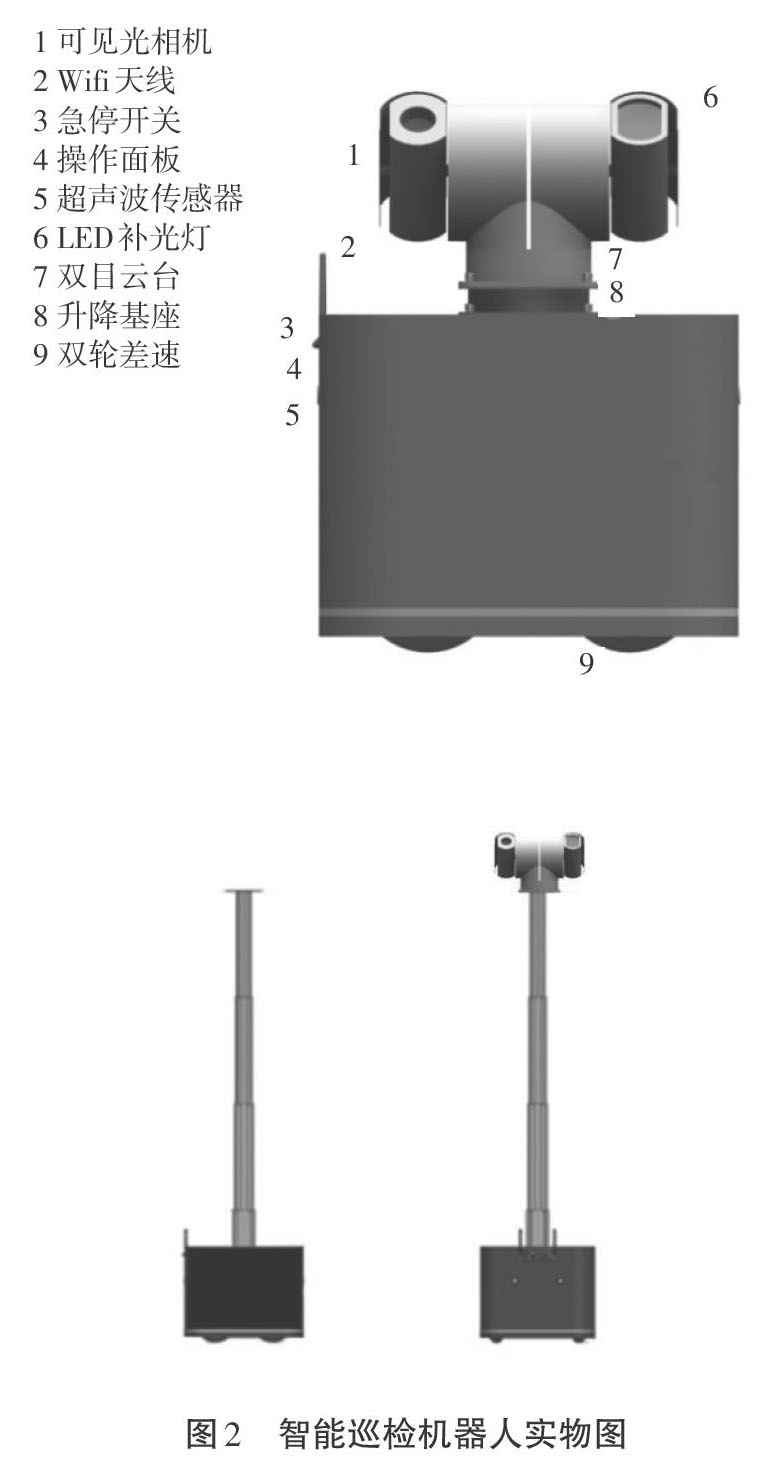
设计完成的智能车整体实物如图2所示。
4 系统软件设计
控制策略是智能机器人设计的核心内容。若智能机器人的运行速度过快,则会导致智能机器人来不及反应而冲出轨道。通过加入速度控制单元,使机器人的运行速度和运行状态得以控制。若机器人发现有弯道,则会减速运行,如智能机器人向左偏离轨道,则控制左侧电机转速下降,直到机器人直线行驶。
4.1 磁导航系统流程
磁导航是一项应用性非常好的技术,主要通过测量路径上的磁场信号来获取车辆自身相对于目标跟踪路径之间的位置偏差,从而实现车辆的控制及导航。磁导航具有很高的测量精度及良好的重复性,磁导航不易受光线变化等的影响。在运行过程中,磁传感系统具有较高的可靠性和鲁棒性。磁条一旦铺设好后,维护费用非常低,使用寿命长,且增设、变更路径较容易。
系统整体软件流程如图3所示。
安全辅助单元主要包括障碍物接触缓冲器、接近监测装置、警示装置、紧急停止按钮,主要为了避免机器人之间、机器人与周围物体以及机器人与人之间的碰撞,是确保机器人安全运行的重要系统。
警示装置包括警示灯和警示蜂鸣器,用以提醒应用现场的人们及时发现正在靠近的机器人并采取相应的措施。操作位置及检修位置均配置紧急停止按钮。紧急停止按钮用以在紧急情况下中断机器人的运行,为便于紧急情况下操作,磁导航小车在地面控制中心、小车车用遥控器和小车车身两侧设置红色的急停按钮。当紧急停止按钮按下后,机器人切断一切设备的动力供给,启动制动器并报警,在排除紧急停止原因之前机器人维持停止状态。
4.2 图像摄取收集
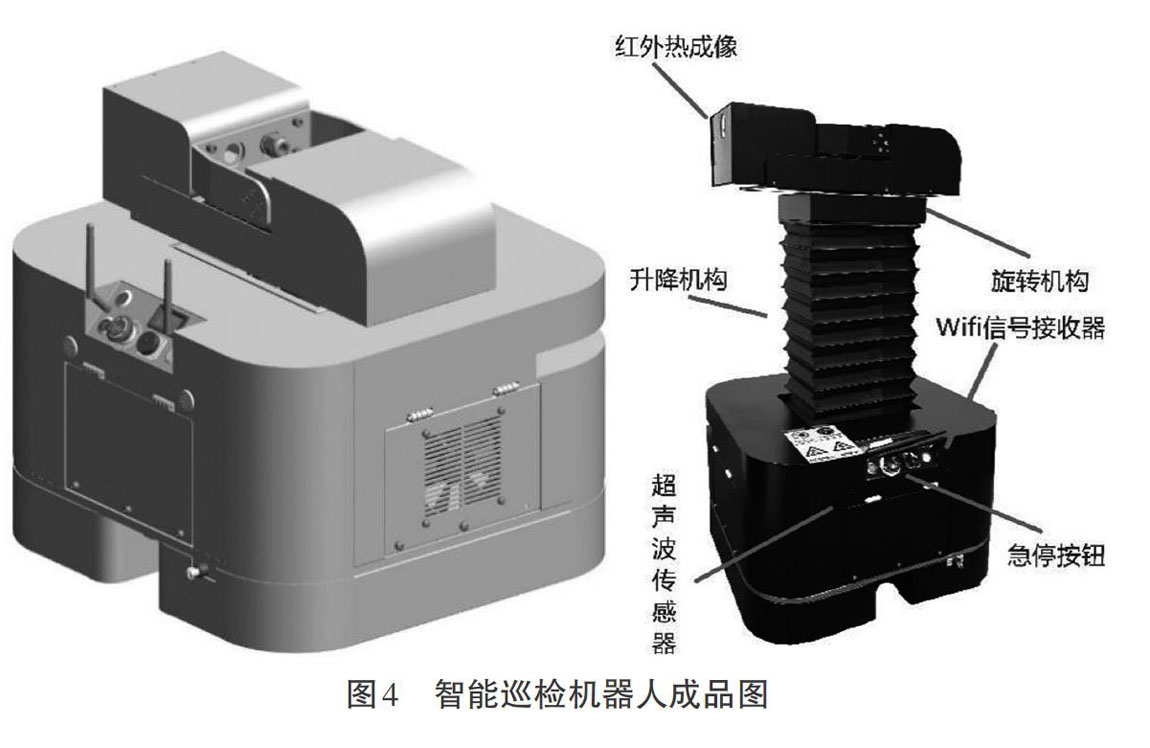
头部成像端部具有自动升降功能,可升降最大高度1.8m,可检测最高位置2.2m,旋转360°;还具有端部旋转功能:根据现场需要检测对面电器柜式,端部检测装置可旋转360°实现水平任意角度的检测。根据现场需要,摄像头端部可升降,可旋转,适应1.8m高度内对称摆放的电器柜巡检。智能巡检机器人成品图见图4。
4.3 图像的处理
所有故障信息发生时间及试验进程的历史记录可在计算机上查询;软件设置具备工程密码,需要专业人员可进入。巡检点ID,即在地图中设置的机器人工作站点,一个巡检点包含多个监视点。
“巡检统计”模块分为“数据统计”和“曲线图”两个界面。
①数据统计:数据统计部分以每个仪表名称(监视点ID)为主键,包括巡检时间、监测数值、仪表属性(量程,类型)、云台拍摄的图片路径。
筛选功能:用户可根据监视点ID、仪表类型、巡检时间筛选出对应的数据,也可根据需求进行打印,导出Excel表格和PDF文档。
②曲线图:曲线显示部分以每个巡检点为主键,显示每个巡检点下的监视点数据。巡检时间为横轴,监测数值为纵轴。
5 结语
地铁各类机房机器烦琐,各种仪表数量颇多,加之准确率、排查率和安全性要求极高,人工巡查很难保证完全不出错漏,而且对巡检人员职业知识和专业性要求很高,需要其有相应的工作经验及责任感,且需要多人24h不间断轮流巡查,各项成本也相应较高。而应用于铁路及地铁站室内工作区(机房、继电柜室、配电室、配电所等)的巡检机器人:拥有可升降1.8区间且360°任意水平角度旋转的红外热成像和高清视频双视结合技术的机头;采用全模块化高封闭式机器人,无需维护,全自动化充电、自动化作业,对出现问题的部件可直接更换相应模块,简单快捷高效,且可以自由添加开发各种新功能;机器人替代人工巡查既可以大大降低各项成本,也能通过各项功能和系统提高准确率和排查率,从而进一步确保地铁系统的安全运营。
在今后的发展过程中,要为机器人执行模块添加更多新功能,如在巡检过程中,使机器人实时感知机房内的温湿度,并能很“聪明”地将数据分析消化,然后自动绘制出热能分布图和湿度分布图。
此外,未来更会突破每台主机只能操作一台机器人的限制,可以一台主机同时监控超过20台巡视机器人,可同时在该主机上对其所控制的所有巡查机器人进行信息录入与问题筛检。不断改进和强化机器人巡查系统,使其替代人工巡查,将是未来地铁机房巡查的必然趨势。未来地铁运营业将因此更加安全可靠。
参考文献:
[1]刘顺明.机房低压供配电系统的可靠性设计[J].中国金融电脑,2009(3):84-88.
- 财务会计管理会计信息化融合方式探析
- 基于对标管理的预算管理整合研究
- 完善企业会计核算监督机制
- 国有企业绩效评价财务指标体系研究
- 国企混改背景下的财务管理转型探究
- 关于有财务公司的大型集团企业开展创新型票据池业务探讨(上)
- 信息化时代企业会计内部控制措施探讨
- 探究新收入准则对企业会计核算的影响
- 浅谈资金池对企业集团资金管理的优化
- 浅谈国有企业财务共享中心建设存在的问题及对策
- 企业重组财务及税务分析
- 我国企业应对反倾销会计信息证据效用研究
- 论企业财务共享中心建设的重点难点与应对举措
- 浅谈低碳经济时代的市场营销模式
- 云南省咖啡品牌建设战略探析
- 新形势下加强食盐营销渠道管理的措施研究
- 基于大数据精准营销的网络营销策略研究
- 服务人员介入产品推销对企业销售业绩的影响
- 经济新常态下企业文化在企业发展中的作用
- 国有企业并购的价值重塑
- 企业数字化审计平台建设现状与对策
- 探究汽车行业项目管理的创新途径
- 我国商业地产企业核心竞争力分析
- 工商管理培训对提升企业管理水平的对策研究
- 企业文化创新对企业管理创新的影响研究
- matter-of-factnesses
- matter of factness's
- matter of time
- matters
- matters'
- matters arising
- mattersarising
- matter²
- matter¹
- mattes
- mattest
- matting
- mattings
- matt, matte, mat
- mattress
- mattresses
- matts
- mature
- matured
- maturely
- maturement
- maturements
- matureness
- maturenesses
- maturer
- 命运不好
- 命运不好的美女
- 命运不好,事情不顺利
- 命运不好,挫折不断
- 命运不好,没有福分
- 命运不好,福分不大
- 命运不好,经历坎坷
- 命运不好,缘分浅薄
- 命运不好,遇事多不顺利
- 命运与相貌
- 命运之神的戏称
- 命运交响曲
- 命运亨通
- 命运先吉后凶
- 命运变好
- 命运多舛
- 命运好
- 命运好坏
- 命运捉弄人
- 命运注定
- 命运由天决定
- 命运预先决定
- 命运预先安排好的
- 命运,不过是失败者无聊的自慰,不过是怯懦者的自嘲
- 命运,天命