钱小丽 孟德文


摘 要:本文以六轴机器人为研究对象,构建物理模型连杆坐标系确定连杆参数,对其运动学进行正逆解分析,并搭建三维仿真模型验证末端执行器位姿、关节角度的正确性,为今后机器人开发和研究提供理论借鉴。
关键词:六轴机器人;正运动学;逆运动学;仿真验证
中图分类号:TP242 文献标识码:A 文章编号:1003-5168(2020)07-0028-03
Absrtact: In this paper, the six axis robot was taken as the research object, the physical model of the linkage coordinate system was built to determine the parameters of the linkage, the kinematics of the forward and inverse solution analysis, and the three-dimensional simulation model was built to verify the correctness of the position and the joint angle of the end actuator, which provided a theoretical reference for the future robot development and research.
Keywords: six axis robot;forward kinematics;inverse kinematics;simulation verification
机器人运动学是机器人学中最关键的一个研究方面,是研究机器人轨迹规划和运动仿真的基础。六轴机器人类属串联机器人,其内部构成相对比较简单,是一开式运动链,由一系列连杆通过转动关节或移动关节串联形成的。六轴机器人的各个关节以串联方式连接,固接在机座和末端执行器上。研究六轴机器人的首要任务是对其进行运动学分析,构建物理模型,分析连杆运动的几何关系,从深层次了解机器人的运动轨迹,得出六轴机器人各运动关节与末端执行器间的位置和姿态,各运动关节与末端执行器间的速度、加速度。通过机器人的数学模型,利用正逆运动学将机器人末端执行器空间坐标系与机器人关节空间坐标系联系起来,是机器人运动学及仿真的意义所在。
1 构建物理模型
六轴工业机器人类属串联型关节式机器人,六关节可自由转动,Axis1左右旋转关节,Axis2前后摆动关节,Axis3上下摆动关节,Axis4左右旋转关节,Axis5上下摆动关节,Axis6左右旋转关节,物理模型参考ABB120工业机器人。
2 D-H坐标系
D-H坐标系最早是由迪纳维特与哈坦伯格提出的一种建立相对位姿的矩阵方法[1],表示了对机器人连杆和关节进行建模的一种非常简单的方法,可用于任何机器人构型,而不管机器人的结构顺序和复杂程度如何。采用D-H坐标系能有效地对机器人连杆和关节进行建模。该坐标系的构建能有效解决有关机器人的运动学问题。
采用连杆坐标系的方法表示六轴机器人各构件主要以D-H坐标系为准。该方法简单易懂,计算过程也相对简便。六轴机器人基坐标系和机座坐标系固接,用六个旋转关节的轴线表示关节运动量[2]。建立坐标系轴线的设置以右手定则为准则。根据六轴机器人物理模型构建机器人的标准D-H坐标系如图1所示。
手腕参考位置和方向,分别由前3个关节和后3个关节来确定。坐标系中后3个关节的轴线相交于一个点,通常把该点选为手腕的参考点,也选作连杆坐标系[4]、[5]、[6]的原点。铅直轴线为关节1的轴线,水平且平行的轴线为关节2和关节3的轴线,且轴线间的距离设为[a2]。垂直相交的轴线分别有关节1和关节2、关节3和关节4的轴线。
描述六轴机器人构件坐标系参数主要有关节变量角[θi]、连杆扭角[αi]、连杆长度[ai]和偏距[di]。[ai]代表连杆长度,规定必须大于等于0;[αi]、[di]和[θi]的值正负都可以。
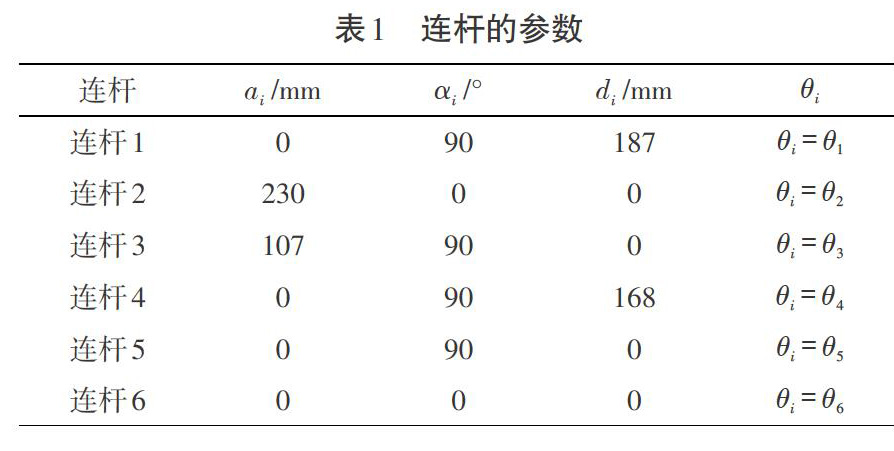
3 六轴机器人参数确定
扭角[αi]和和杆长[ai]均属于标准D-H坐标系中的结构参数,而偏距[di]和关节变量角[θi]均属于运动变量,定义各连杆的几何结构参数和运动变量,列出相应的连杆参数如表1所示。
4 六轴机器人运动学分析
六轴工业机器人的运动学分析包含两个部分:第一是求解运动学正解问题(正运动学分析);第二是求解运动学反解问题(逆运动学分析)。如果各关节变量是给定数据,可运用正运动学分析过程进行解答,正解结果就是最终六轴机器人末端连杆的位姿;若各关节变量为未知数据,可运用逆运动学分析进行解答,反解结果就是关节变量值。气动驱动的夹钳式手抓是六轴机器人夹持工件移动的夹具类型,是六轴机器人末端执行器中常用的一类手抓。此类手抓结构的参数直接决定机器手臂工作过程中的准确定位,简单来说就是由手抓形状和大小兩个参数确定,机器人手臂末端位置就不会变化。
4.1 六轴机器人运动学矩阵
点、向量、位置、方位都可用矩阵描述,点在不同坐标系中的描述可以用坐标平移、坐标旋转进行变换。坐标系的原点和参考坐标系的原点是两个不同的概念,存在本质区别,但都可以通过向量进行表示。
4.3 六轴机器人逆运动学分析
与正运动学分析相比,逆运动学分析更难求解,是指已知机器人末端的位置姿态,计算机器人对应位置的全部关节变量。机器人逆运动学包括存在性、唯一性和解法三个问题。存在性可以判断机器人操作臂是否处于有效工作空间范围内,同时也是分析机器人运动轨迹的根本。严格来讲,机器人工作空间通常可分为灵活(工作)空间和可达(工作)空间两种,前者是指机器人末端能以任意方位到达的目标点集合,而后者则是表示机器人末端至少能以一个方位到达的目标点集合。显然,灵活空间是可达空间的子集,在灵活空间的各点上,机器人末端的指向是任意规定的。唯一性是指对于给定的位姿,仅有一组关节变量来产生希望的机器人位姿。如果机器人的给定位置偏离工作空间,这时所获取到的各个关节变量值都无任何意义,机器人的末端执行器将丧失其功能。对于机器人,可能产生多解。机器人运动学逆解的数目决定于关节数目、连杆参数和关节变量的活动范围。一般而言,非零连杆参数愈多,到达某一目标的方式也愈多,即运动学逆解数目越多。根据具体情况,从多组解中选择其中的一组就是最优解的问题。在避免碰撞的前提下,通常按最短行程的准则来择优,使每个关节的移动量为最小。逆运动学问题的解法可分为封闭解法和数值解法两种。在终端位姿已知的条件下,封闭解法可给出每个关节变量的数学函数表达式;数值法则用递推算法给出关节变量的具体数值。在求逆解时,总是力求得到封闭解,因封闭解法计算速度快、效率高,便于实时控制,而数值解法不具备这些特点。下面利用反变换法得到六轴机器人的封闭解,即代数解。
此六轴机器人利用不同运动方程找出含有未知元素的简易表达式,求得较少未知数的方程,解出运动学反解,即六个关节变量角。通过上节求得六轴机器人的运动学方程,将运动方程两边左乘连杆的逆矩阵,解出各关节角度。
5 六轴机器人运动学仿真验证
5.1 搭建六轴机器人三维仿真模型
在仿真软件中利用函数搭建模型,根据六轴机器人的D-H参数,搭建其三维模型并仿真得到六轴机器人的函数模型和连杆三维仿真模型。
5.2 六轴机器人正运动学验证
为了验证六轴机器人的正逆运动学分析结果的正确性,选取一组关节变量为[θ1=0·?,θ2=90·?,θ3=-90·???][,θ4=θ5=θ6=0·??]分别代入正运动学方程中,依方程求解手臂变换矩阵[60T]的计算机器人的末端执行器的位置坐标为[107,0,249]。
用软件中的函数对求得的正运动学方程进行仿真检验,以搭建的六轴机器人的三维连杆模型为基准,将这组值赋给6个关节变量角,运行.m文件,可以得到机械手末端位姿。
5.3 六轴机器人逆运动学验证
为了验证六轴机器人逆运动学分析结果的正确性,选取P2的位置和姿态验证:
[P2=1.000 00.000 00.000 01.069 50.000 0-1.000 0-0.000 0-0.000 0-0.000 00.000 0-1.000 02.490 00001.000 0]? (19)
用软件中的函数进行仿真检验,运行后得到六轴机器人的六个关节角变量结果为:
[q2=0.000 0,1.571 0,-1.571 0,0.000 0,-0.000 0,-0.000 0]。
选取末端位姿P2,通过仿真函数得出验证结果,仿真出来的关节角度[q2]结果与选取的[P2]关节角度一样,说明此运动学反解求解正確。
6 结语
本文对六自由度机器人本体进行了详细分析,通过构建本体物理模型及各连杆坐标系,采用典型算法求出运动学正逆解,并选择专业仿真软件进行了建模仿真。结果表明,仿真得出的末端执行器位姿与运动学方程计算的结果一致,说明六轴机器人的设计合理。
参考文献:
[1]孙树栋.工业机器人技术基础[M].西安:西北工业大学出版社,2006.
[2]周承仙,富巍.串联机器人运动学分析与研究[J].中北大学学报(自然科学版),2016(5):523-524.
[3]熊有伦.机器人技术基础[M].武汉:华中科技大学出版社,2015.
- 薪火化甘霖,花开得绚烂
- 从另一个角度看艺术
- 严谨贴切,生动优美
- 身体的质变
- 资讯
- 我国电子出版产业版权保护体系的构建与完善
- 高校教材出版建设的发展及定位思考
- 大学出版社绩效考评指标体系设计
- Web2.0时代数字媒体艺术的传播探议
- 全媒体冲击下传统出版生存模式探寻
- 第七届“二十一世纪中国儿童阅读推广人”论坛侧记
- 新老图书齐发 畅销变常销
- 数字出版的黄粱梦
- 三中全会,出版改革的外部推动力
- 打好版权引进持久战三步骤
- 与中国经济共沉潜:经管类图书观察
- APP与传统图书编辑的数字出版
- 内外兼修,夯实学术出版新价值
- 如何提高引进版少儿科普书的编校质量
- “读图时代”的图文博弈
- 浅析全媒体时代的编辑定位
- 教育改革中的英语教育出版物转型
- 信息化时代下侨刊乡讯的发展
- 用体制机制改革保障出版质量
- 新媒体视域下的科技期刊发展策略研究
- the nation/the country
- the natural world
- thence
- the needy
- the nervous system
- the net
- the new
- the new grove dictionary of music and musicians
- the news
- the new testament
- the next
- the nitty-gritty
- thenner
- thennest
- the nobility
- the north-east
- the north pole
- the north-west
- the novelty wears off
- thens
- the number of times
- then²
- then¹
- theo
- the occult
- 真的
- 真的假不了,假的真不了
- 真的假不了,琉璃瓦不了
- 真的假不得
- 真的割不掉,假的安不牢
- 真的猛士,敢于直面惨淡的人生,敢于正视淋漓的鲜血
- 真的说不假,假的说不真
- 真的里头搀假的
- 真皮
- 真相
- 真相不明、证据不足、一时难以判决的案件
- 真相不明,让人犯糊涂
- 真相大白
- 真相毕露
- 真相隐秘不明,令人生疑
- 真眉
- 真真
- 真真假假
- 真真假假辨不清
- 真真国
- 真知
- 真知实见
- 真知灼见
- 真知的根是安在经验里的
- 真确