李甜田 张琪 张勇 张熙

摘 要:本文通过研究目标在单一场景条件下的成像特点与背景图像特征,提出一种基于动态特征、静态图像特征结合的单一背景目标检测算法框架模型。然后,通过分析算法模型对目标特征凸显的两种策略模式,分析其突出特征。最后,结合背景抑制分割方法,实现背景中目标的自适应溢出。
关键词:单一背景;运动特征;静态特征;目标检测
中图分类号:TP391.41文献标识码:A文章编号:1003-5168(2020)13-0030-05
Single Background ObjectDetection Method Based on
Dynamic and Static Combination
LI Tiantian ZHANG Qi ZHANG Yong ZHANG Xi
(The 27th Research Institute of China Electronics Technology Group Corporation,Zhengzhou Henan 450047)
Abstract: In this paper, by studying the imaging characteristics and background image characteristics of the target in a single scene, a single background target detection algorithm framework model based on the combination of dynamic characteristics and static image characteristics was proposed. Then, through the analysis of the two strategy modes of the algorithm model to highlight the target features, the prominent features were analyzed. Finally, combining with the background suppression segmentation method, the adaptive overflow of the target in the background was realized.
Keywords: single background;motion feature;static feature;object detection
1 研究背景
红外/可见光成像探测系统能够增强人们在探测或者检测领域对图像的认知和理解能力,且具有良好的隐蔽性、较强的抗干扰性能、较远的作用距离和可昼夜工作等优点,已被广泛地应用于目标探测与火控、精确制导、搜索跟踪与预警以及光学遥感等军用和民用领域。充分发挥红外/可见光成像探测技术的优势,提高系统的探测能力,对提高基于成像的探测应用系统的性能具有重要的意义[1]。
针对天空背景运动目标,其图像特征及实际运动特性具有一定的规律性和显著性。某标准测试数据集图像如图1所示。
国内很多学者已经做了大量拓展的研究工作,并发表了相关研究成果,如2004年,尚晓清[2]研究了多尺度分析在静态图像处理中的应用;2010—2011年,周慧鑫[3]、刘上乾[4]等提出基于多尺度截断和基于剪切波变化等两种方式解决红外复杂背景抑制方法;2015年,周慧鑫等人[5]又提出了多尺度各向异性扩散方程的红外弱小目标检测方法。
2 算法模型框架
2.1 单一场景背景与目标图像特征分析
2.1.1 场景背景分布特性。本文中单一场景指的是天空(有云或者无云),场景中除目标(飞机、飞行器等)外,不存在其他大面积强烈干扰目标的干扰区域。在图像中表现为非目标区域的图像统计特性分布均匀,而目标表现为较场景中的图像特性分布具有更高的对比差异性。后续图像目标检测方法均为基于此场景分布特性进行分析。
2.1.2 目标特性分析。基于单一场景特征条件下,目标的特征从直观角度分析可以直观描述。例如:根据人的经验,目标是运动的,目标相对于场景分布更突出(更亮或者更暗,较高辨识度),目标是一个封闭形状的突兀区域等。通过该直观特性分析,理想的目标反映在图像上应是一个闭合的连通区域,同时应该具有以下5个基本特性:呈现斑点状或块状;较小的熵;目标内部近似均匀的强度;与其局部邻域的差异性;具有相较于背景的快速运动性。
综合单一场景条件下背景与目标的特性分析,该场景下目标检测是依据目标特性将目标从背景中分割出来,通过这一过程实现对目标的检测。
2.2 算法框架模型总体思路
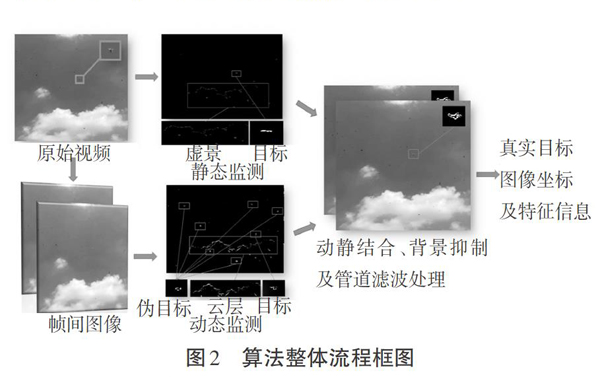
本文目标检测的核心目的是凸显单一背景中的目标,进而通过图像分割、目标特性滤波等手段,实现图像视频中的目標检测,进一步实现连续图像/视频中的目标跟踪效果。本文的整体算法思路如图2所示。
2.3 基于帧间的运动目标检测方法
帧间差分方法是通过对序列图像中相邻帧做差分或“相减”运算,利用序列图像中相邻帧的强相关性进行变化检测,从而检测出运动目标。当场景中出现异常目标运动时,相邻两帧图像之间会出现较为明显的差别,通过直接比较相邻两帧对应像素点灰度值的不同,选取阈值,判断图像对应位置像素差值的绝对值是否大于阈值,从而提取序列图像中的运动区域。该方法的优点是计算简单,程序复杂度低,运行速度快,对动态环境有较好的适应性。该方法的缺点是易在目标内部形成“空洞”现象和“双影”现象(差分图像物体边缘轮廓较粗);不能提取运动对象的完整区域,仅能提取轮廓;算法效果严重依赖所选取的帧间时间间隔和分割阈值。
2.4 基于静态单幅图像显著性特征检测
基于静态图像目标检测的计算过程如下:
其中,[I]和[u]分别为原始图像和背景抑制后的图像;[H]为局部自适应算子;加权系数[λE]、[λW]、[λN]和[λS]分别为一阶邻域内4个方向上的扩散量,其计算公式为:
其中,[ct]为扩散函数,满足连续严格单调递增,以实现抑制背景并增强目标。
其中,
本文中[ct]选择的函数形式为:
式中,[k]为常数,通常在10~20范围内,本系统选择的[k]值为18.75。
2.5 基于特征图像的自适应决策边界分割方法
图像信息经过平滑去噪、背景抑制(或目标增强)等处理后,即可通过分割的方法提取目标的位置坐标,本文采用一种基于分块自适应决策的边界分割方法[6-12]。
[wx,y]表示需要分割图像中对应坐标点处的灰度值。若图像w的横、纵像素数均为[K]的整数倍,则将图像分割成[K]块,否则,将图像w的横、纵像素数均扩展为[K]的整数倍,再进行分割。然后计算自适应边界[T],计算公式为:
其中,[m]和[υ]分别为每一个小块图像取其灰度均值和标准差;[k]为常数,经验值为3~12;[r]([r]>0)为自适应决策边界系数,自适应决策边界系数可调节决策边界的大小。
将图像中每一个点与决策边界进行比较,将图像二值化,具体操作如式(11)所示:
本文中计算动态检测的分割阈值方法如下:记图像大小为[m×n],[f(i,j)]为当前帧图像[(i,j)]的灰度值,[f′(i,j)]表示前一帧图像[(i,j)]的灰度值,记中间变量为:
自适应阈值为:
其中,[nl和σ]均为常数,[nl=12],[σ=0.9]。
计算静态分割阈值方法为:
自适应阈值为:
其中,[nl和σ]均为常数,[nl=12],[σ=0.9]。
2.6 基于多维特征的目标决策策略
通过动态目标特征及静态目标特征图像检测,并结合自适应决策边界图像分割,在图像上会呈现多个候选目标。通过多个候选目标的多个维度特征进行决策,可以有效剔除伪目标、虚景等容易干扰的目标信息。本文采用管道关联滤波器作为目标决策的主要决策方式,管道关联滤波器决策采用的具体特征包括多次检测到目标的运动特征(如运动速度,反映到图像上可描述为帧间运动图像像素的欧氏距离),多次检测到目标的尺度特征(如多次检测到目标变化尺度具有上下限),多次检测到目标的形状特征(如形状在帧间变化有限),多次检测到的目标灰度特征(如目标灰度统计特征在帧间变化有限)。管道关联滤波流程如图3所示。
3 参数影响分析
3.1 自适应阈值参数分析
基于图像像素计算信息得到的自适应分割阈值中[nl]、[σ]表示控制决策阈值边界系数,通过调整这两个参数值大小可以控制图像中目标检测的敏感性。通常,当[nl]、[σ]的数值相对较大时,目标检测敏感性能力受抑制;当[nl]、[σ]的数值较小时,目标检测敏感性能力提高,同时会降低抗噪声干扰的能力。这就意味着,在实际使用时,可以根据相应的图像使用场景进行测试修改。同时,[nl]与探测图像类别相关,如可见光图像与红外图像目标检测中的该参数值差别较大,[σ]数值相对于同一探测图像的不同场景响应度更高,如对于可见光图像,晴朗天气下[σ]的数值相对较大,阴天等云雾较多的场景条件下[σ]的数值相对较小。后续可根据场景统计特征进行参数值的自适应调整,处理效果类似于相机等前端探测设备中的自动曝光功能。
3.2 静态检测扩散函数参数分析
本文中扩散函数[c(t)]选择的函数形式见公式(9),[t]表示灰度之差的绝对值,不同参数[k]对应的扩散函数曲线如图4所示。
从图4可以看出,随着参数[k]数值的增大,参数曲线的斜率不断减小,这就意味著对应于参数更大的扩散函数曲线,对梯度变化更小的梯度绝对值能反映的扩张能力相对更小,对参数更小的扩散函数曲线,对梯度变化更小的梯度绝对值能够反映的扩张能力相对更大。反映到实际应用场景使用时可以得到如下结论:当场景分布灰度更广更均匀时,对应的参数曲线可以采用参数数值更小的参数曲线,对应场景分布灰度更窄的图像可以采用更大的参数函数曲线,不过在实际测试使用时,建议采用参数更小的曲线,这样能对微小的梯度变化更加敏感。
4 实验验证效果分析
4.1 测试效果
本文测试视频图像数据是通过实际工程项目中使用的光学系统采集得到的,包括可见光视频和红外图像视频均进行了一系列测试,通过本文算法模型框架得到的效果如图5、图6和图7所示。
利用可见光针对纯天空背景(有云)的无人机实际检测测试应用场景如图5所示。
利用可见光探测针对地面与天空交汇背景的无人机实际检测测试应用场景如图6所示。其中图像中天空部分占比大。
利用红外探测针对天空背景(有云)的无人机实际检测测试应用场景如图7所示。
图5、图6和图7展示的检测效果表明本文算法模型框架能有效地进行目标检测和提取。即便在图6中有少部分地面背景,但仍以天空背景为主的情况下,仍然能有效检测和提取出目标。
4.2 计算复杂度
动态检测计算复杂度为[O(m×n)],共进行[mn]次减法,静态检测计算复杂度[O(m×n)];但是比帧间差分多做[6mn]次加减法和[4mn]次乘法。
进行图像阈值求解计算部分的计算复杂度为[4mn]次加减法和[mn]次乘法。
目标聚类和管道滤波方法的计算复杂度在本文中不作为重点,因此不做衡量。
整体而言,静态检测部分在整个算法模型框架中为最高计算复杂度部分,在实际应用和工程实践中可对此部分进行针对性处理和实现,以提高整体的计算效率。
5 未来的工作
5.1 該模型框架优缺点
本文采用的算法框架模型设计思路直观简单,计算复杂度相对较低,可应用于各种硬件处理平台(PC或嵌入式)中,并且基于本文提出的算法框架模型,可以针对实际使用需求对各个模块参数进行修正,能应用于针对使用需求的场景特征和目标特性。
但是,本文提出的算法处理的场景相对单一,单线程计算复杂度相对较高,并且多个参数的使用过多依赖于人为经验设置,在实际工程应用中需修改和调整。
5.2 改进思路
为了适应更多的工程应用场景需求,框架中的相关参数可以进行场景自适应处理,即根据场景图像的相关计算统计信息可以自适应调整参数的设置,提高算法框架的鲁棒性。
结合嵌入式硬件算法优化策略,算法框架模型中的静态检测部分在单核处理器上运行相对耗时,而当应用于FPGA或GPU等嵌入式计算平台中,由于硬件的并行处理计算架构,通过硬件逻辑实现大幅度降低整体计算时间,提高计算效率。因此,结合具体硬件平台的优化,可以将本文中目标检测框架模型应用于多种使用场景中,以满足多场景使用需求。
6 结语
本文通过场景中目标多特征分析,采用一种基于动静结合的目标检测框架模型,该模型针对单一场景时,能有效检测并提取目标。同时,该模型算法结合模块化设计思路,能通过优化对应模块和修改对应模块的相关参数,满足针对特定场景的应用需求。此外,由于该模型的设计思路相对简单,可应用于嵌入式等多计算平台中。在实际多个工程应用中,该算法也进行了实际场景的测试,在工程实践中也得到了相关检验和验证。
参考文献:
[1]庞英名.基于PTS和GM-CBMeMBer滤波的红外多弱小目标检测跟踪算法研究[D].西安:西安电子科技大学,2017.
[2]尚晓清.多尺度分析在图像处理中的应用研究[D].西安:西安电子科技大学,2004.
[3]周慧鑫,秦翰林,赖睿,等.基于多尺度截断的弱小目标复杂背景抑制[J].光学学报,2010(10):2812-2816.
[4]秦翰林,李佳,周慧鑫,等.采用剪切波变换的红外弱小目标背景抑制[J].红外与毫米波学报,2011(2):162-166.
[5]周慧鑫,赵营,秦翰林,等.多尺度各向异性扩散方程的红外弱小目标检测算法[J].光子学报,2015(9):146-150.
[6] Wang chuanyun, Qin Shiyin. Adaptive detection method of infared small target based on target-background separation via robust principal compenent analysis[J]. Infared Physics & Technology, 2015(69):123-135.
[7] Lou J , Zhu W , Wang H , et al. Small target detection combining regional stability and saliency in a color image[J]. Multimedia Tools and Applications,2017(13):14781-14798.
[8]赵东,周慧鑫,于君娜,等.复杂天空背景下的红外弱小目标跟踪[J].强激光与粒子束,2018(6):27-34.
[9]赵东,周慧鑫,秦翰林,等.基于引导滤波和核相关滤波的红外弱小目标跟踪[J].光学学报,2018(2):39-46.
[10]基于移动式加权管道滤波的红外弱小目标检测[J].西安电子科技大学学报(自然科学版),2007(5):743-747.
[11]董维科,张建奇,刘德连,等.基于运动方向估计的管道滤波算法[J].光子学报,2013(4):471-474.
[12]基于移动管道的红外弱小目标检测算法与仿真验证研究[D].杭州:浙江大学,2015.
收稿日期:2020-03-15
作者简介:李甜田(1987—),女,硕士,工程师,研究方向:光电导航、图像处理;张琪(1988—),男,硕士,工程师,研究方向:光电导航、目标识别与跟踪等。
- 正确对待网络舆情,理性解读平和现状
- 普通高校大学物理课程教学与考核模式探讨
- 妇产科护理工作现状及管理手段的创新研究
- 浅谈石油钻井企业如何做好职业卫生管理工作
- 浅谈“无机化学实验”的安全教育
- 妇产科护理中感染问题的分析与应对
- 小鼠海马神经细胞的分离培养
- 自媒体下高校青年学生法治思维培养研究
- 鸡球虫病的诊断与防治措施
- 原创网文在“圈层化”背景下的思想政治教育话语权探析
- 电视新闻采访技巧的灵活运用
- 高职学生思想政治理论课获得感的提升路径
- 浅谈奶牛常见疾病及其防治
- 儿童文化视域下师幼关系人性的回归
- 浅析防渗漏技术在水利建筑工程施工中的应用
- “三明治式”家长会
- 动力转向器输入轴的结构优化分析
- 西部一流学科建设高校研究生导师队伍建设体系探究
- 潜心教书用心育人:新时代教师的初心与使命
- 装配式混凝土框架结构拆分初探
- 医学院校大学生社会心态的现状调查与应对策略
- 论在数控车上保证圆锥轴配合精度的加工方法及工艺
- 单片机微数控
- 大学生在线开放网络公共选修课学习情况调查研究
- 浅谈师范类院校应用化学创新创业人才培养模式
- impartments
- imparts
- impassabilities
- impassability , impassableness
- impassable
- impassablenesses
- impassably
- impasse
- impasses
- impassioned
- impassionedly
- impassionedness
- impassionednesses
- impassionedness's
- impassive
- impassively
- impassivenesses
- impassiveness, impassivity
- impassivities
- impatience
- impatient
- impatiently
- impatientness
- impatientnesses
- impeach
- 釜山
- 釜底尘
- 釜底抽薪
- 釜底枯鱼
- 釜底游魂
- 釜底游鱼
- 釜底游鱼,瓮中之鳖
- 釜底鱼
- 釜甑尘生
- 釜生鱼
- 釜砾
- 釜里之鱼
- 釜里之鱼釜底游鱼
- 釜銊
- 釜鱼
- 釜鱼幕燕
- 釜鱼柙兽
- 釜鱼槛兽
- 釜鱼瓮鳖
- 釜鱼甑尘
- 釜鱼阱兽
- 釜鸣雷
- 釜鼎鱼游
- 針
- 釠