崔瑞超 卢亚娟
摘 要:本设计利用多传感器信息融合技术把采集到的数据进行融合,并把信息反馈给控制器,为实现实时控制和智能控制提供保障。最后,通过该算法在机器人运动姿态检测中的应用验证该算法的正确性。结果表明:此种方法无须传感器的任何先验知识,能客观显示各传感器的可靠程度,比其他方法具有更高的融合精度。
关键词:多传感器;信息融合;机器人运动姿态检测
中图分类号:TP391.41;TP242 文献标识码:A 文章编号:1003-5168(2020)16-0019-03
Abstract: In this design, multi-sensor information fusion technology was used to fuse the collected data and feed back the information to the controller, providing guarantee for the realization of real-time control and intelligent control. Finally, the correctness of the algorithm was verified by the application of the algorithm in the robot motion attitude detection. The results show that this method does not need any prior knowledge of sensors, can objectively show the reliability of each sensor, and has higher fusion accuracy than other methods.
Keywords: multi-sensor;information fusion;robot motion attitude detection
1 多传感器数据融合的定义和原理
多传感器数据融合是将多个同类型或者不同类型的传感器的信息进行综合处理的过程,以更高的精度、概率得到人们需要的目标状态估计,为上层提供有用的决策信息。多传感器融合可以充分利用采集到的信息,了解被检测目标的位置,提高测量精度[1-2]。
多传感器融合的原理就像人的大脑一样,可以处理多重复杂信息,把多个传感器信息资源使用某种规则进行组合,综合处理复杂问题。
1.1 数据融合分析
为了测量机器人在运行过程中的偏移比例和偏航角度,在车体上安装传感器。传感器包括测距传感器和测角度传感器。角度传感器测到的角度数值经过融合后获得机器人的位置方向,可通过对机器的姿态调整,使得机器人更好地工作[3-4]。
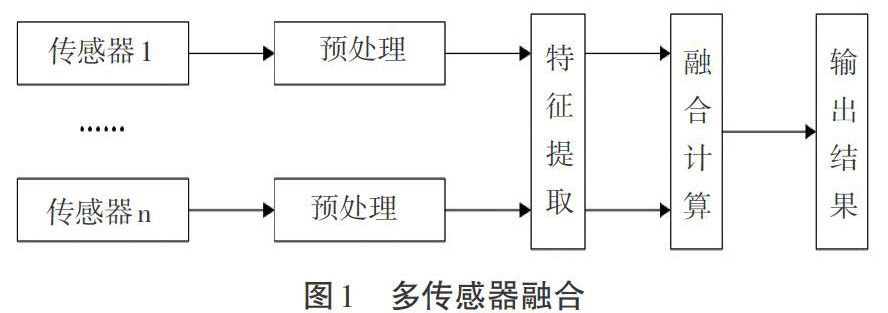
传感器把采集到的数据信息进行预处理后,经过特征提取和融合计算后,把融合后误差小的数据输出,具体如图1所示。
1.2 数据的一致性检验
使用多传感器测量时,在进行数据融合前要对测量的数据进行检验;若不检验,当传感器出现故障或干扰因素时,会造成测量数据不准确,使融合精度变低。采用[m]个传感器进行测量,先要对测量值[Xi(i=1,2,…,m)]进行检验,规则是相邻两个测量值之差小于等于给定的阈值[ε],即满足式(1)。
2 多传感器自适应加权融合算法
2.1 自适应融合模型
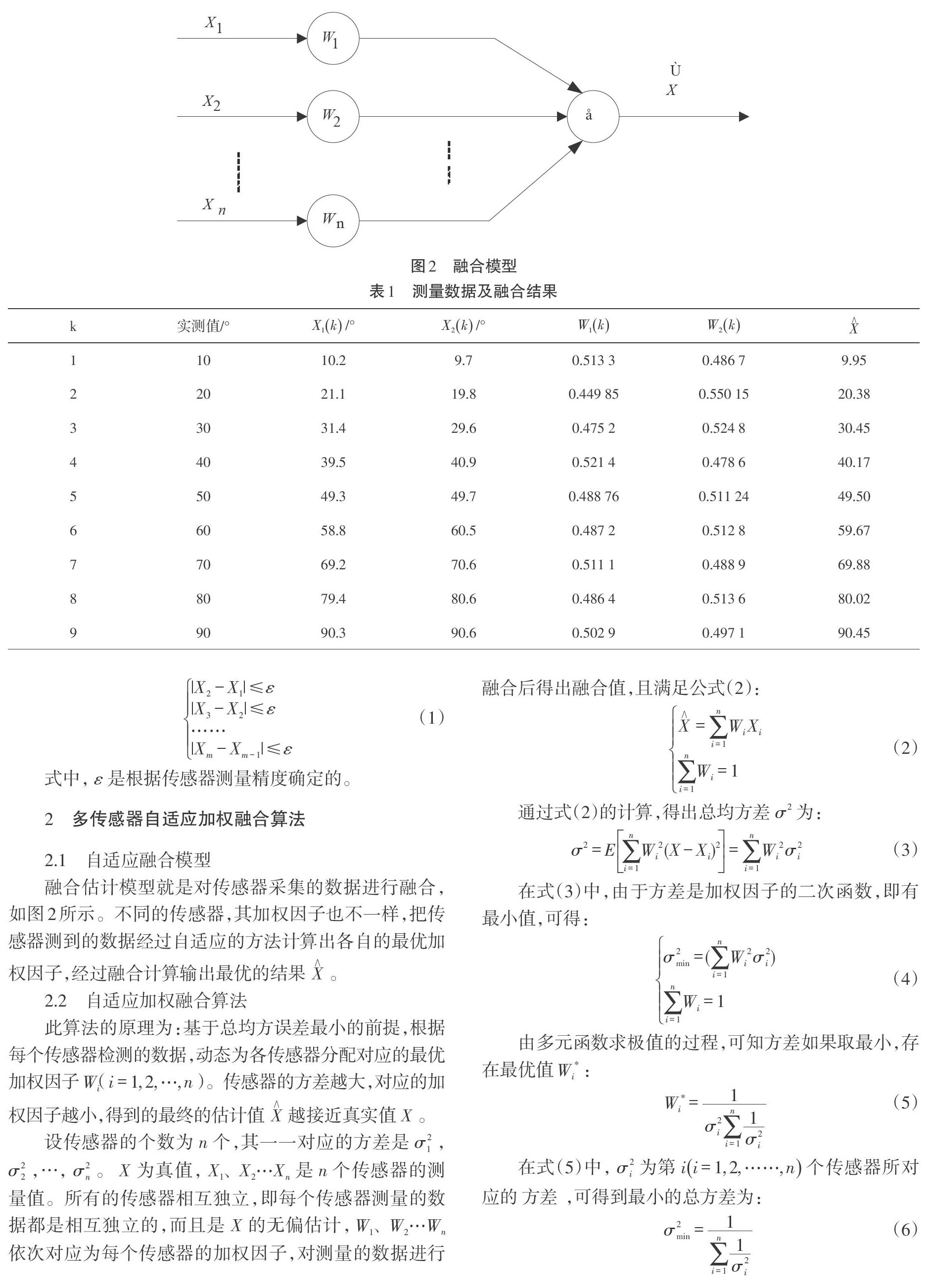
融合估计模型就是对传感器采集的数据进行融合,如图2所示。不同的传感器,其加权因子也不一样,把传感器测到的数据经过自适应的方法计算出各自的最优加权因子,经过融合计算输出最优的结果[X∧]。
2.2 自适应加权融合算法
3 算法在运动姿态检测的应用
在履带式机器人车体上安装有传感器,车体两侧各装有2个测距传感器,在车体中心线上装有2个用于测量姿态的角度传感器。为验证算法的正确性,对角度传感器采集到的数据进行融合,让机器人偏航10°、20°、30°、40°、50°、60°、70°、80°、90°。表1为部分测量数据和融合结果。
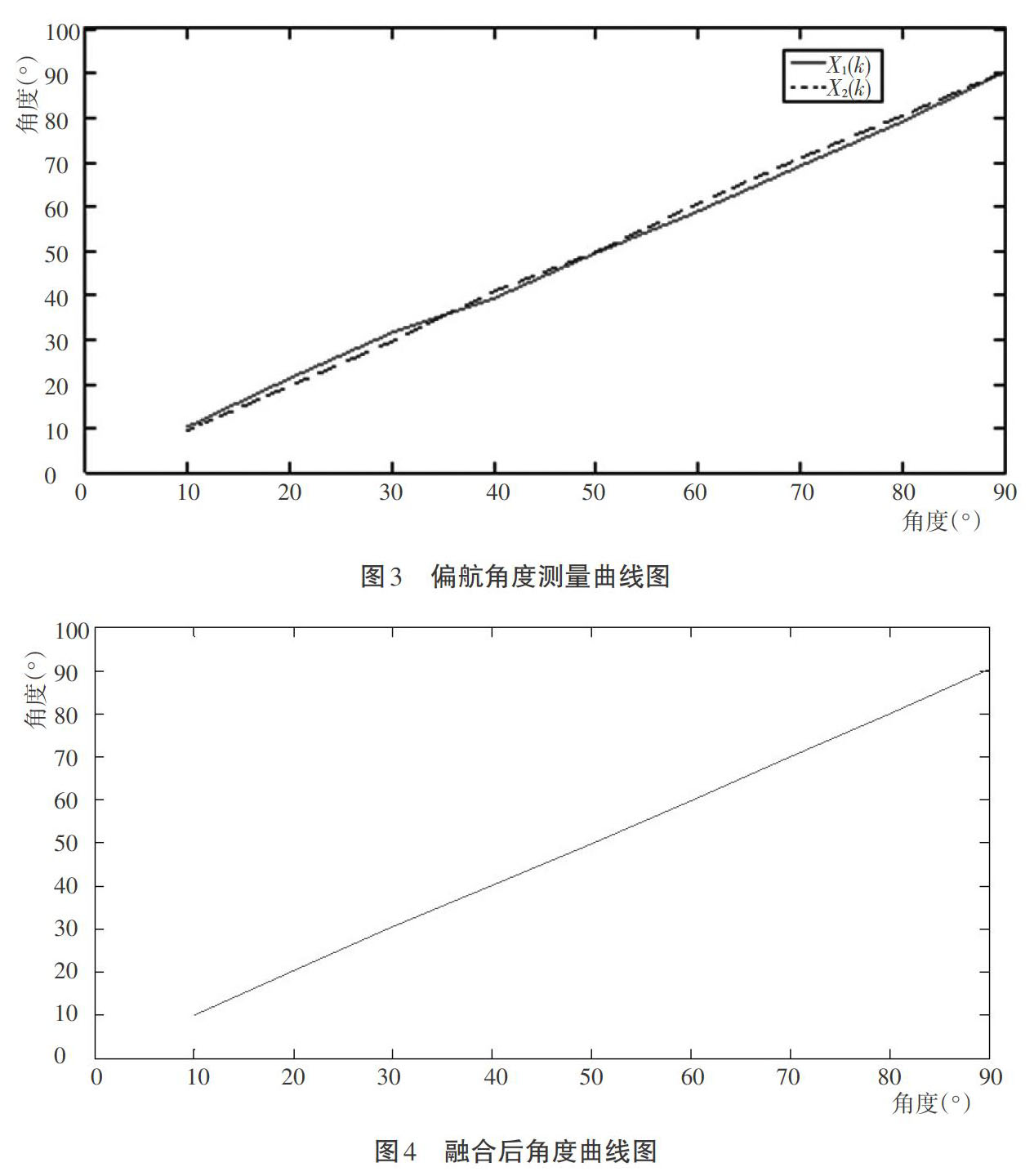
其中:k表示测量序号;[X1k]、[X2k]为角度传感器的测量数据;[W1k]、[W2k]为对应的权值;[X∧]为自适应加权融合结果。由表中数据得出,传感器的检测精度越高,对应的加权因子也较高。对表中數据进行绘图,结果如图3、图4所示。
图3中,[X1k]、[X2k]表示车体每次偏航10°传感器的测量数据。
图4中是把2个传感器测量值融合后得到的[X∧]的数据曲线图。从图中可知,经融合算法后得到的数据很接近真值,误差较小。实验结果表明,该算法提高了检测的精度,得到了比较精确的数据。
4 结语
本设计以履带式变形机器人为平台,利用多传感器信息融合算法技术,对传感器融合模型进行分析。最后,通过仿真实验,验证了该算法的正确性。
参考文献:
[1]彭多亮.多传感器多源信息融合理论及应用[M].北京:科学出版社,2010.
[2]杨丹,刘小平,胡凌燕.基于多传感器信息融合的机器人姿态测量系统[J].计算机工程与设计,2016(6):1681-1686.
[3]康健.基于多传感器信息融合关键技术的研究[D].哈尔滨:哈尔滨工程大学,2013.
[4]罗彬.基于多传感器信息融合的移动机器人控制[D].上海:东华大学,2016.
- 基于财富管理中心视角的区域金融中心发展对策
- 如何构建金融创新的生态系统
- 中央银行预算独立性的模式构想
- 应对信用卡危机的国际经验与启示
- 中国居民部门的债务杠杆率有多高?
- 建立结果导向型财政支农资金整合机制的探讨
- 行政事业单位财政支出管理中绩效评价的应用路径探讨
- 多元化、多层次发展中职金融事务专业
- 绩效评价在行政事业单位财政支出管理中的实际应用研究
- 金融监管背景下典当行发展的战略方向
- 新常态下政府财政支出绩效评价管理体系的思考
- 浅析“营改增”对地方财政收入的影响
- 保险在供应链金融中的作用
- 关于事业单位加强财务管控的对策研讨
- 政府补助会计政策选择的经济后果分析
- 新时期水利事业单位财会人员现状及存在问题研究
- 高等学校内部控制工作思考
- 上市银行会计信息披露存在的问题和对策研究
- 浅议以财务管理为核心的企业价值创造
- 医院建设项目内部控制存在的问题及对策
- 大数据下财务模式的变革探讨
- 管理会计在小微企业的实际应用探究
- “管理会计”课程教学实践探讨
- 关于上市公司内部存在问题分析与策略探讨
- 铁路财务共享服务的实现意义及策略探究
- yearling
- yearlings
- yearlong
- year-long
- year long
- yearly
- yearn
- yearned
- yearner
- yearners
- yearnful
- yearnfully
- yearning
- yearningly
- yearnings
- yearns
- year on year
- year over year
- year-round
- year round
- year-rounders
- years
- yearsend
- year's end
- year-to-date
- 相称
- 相称合
- 相称,合适
- 相窒
- 相窥
- 相竞
- 相符
- 相符合
- 相符,相当
- 相等
- 相等,相比
- 相类
- 相类似
- 相类似的例子
- 相类相从
- 相糾
- 相紛
- 相纠
- 相约
- 相约邀请
- 相约隐居的同伴
- 相纷
- 相经
- 相结
- 相绝