农业机械转向自动控制技术及常用方案
谢伟丽
摘 要:智能农机是农业机械发展的主要趋势,随着农业机械化的不断进步,农业机械的自动化程度不断提高,为实现农业机械的导航和自动化行驶,为农业机械研究合理的自动转向技术十分重要。通过对农业机械自动转向的研究过程进行分析,说明了转向自动控制技术的基本原理和常用方案,并对各种方案的优缺点进行了分析。
关键词:农业机械;转向;自动控制;技术;方案
中图分类号:S223.91;TP273 文献标识码:A
doi:10.14031/j.cnki.njwx.2019.08.011
现代化的农业机械在我国农业生产中发挥了巨大的作用,由于农田作业过程中地面阻力和地表状态的共同影响,使人工驾驶农机的过程变得更为复杂,传统的拖拉机转向控制多采用全液压助力技术,尽管如此,转向过程中仍存在着方向盘沉重、转向可靠性不足的问题,这在很大程度上增加了驾驶员的劳动负担。加之农业机械的自动化发展趋势是全自动化作业,因此,就必不可少的要求农业机械能够实现自动化导航行驶,这对转向控制技术提出了新的要求。自动转向技术不仅能够有效提高农机的自动化作业能力,还能够提升农机作业的精细程度,使农业生产变得更加简单轻便,有利于农业机械新功能的研究与功能优化。
1 农业机械自动转向的相关研究
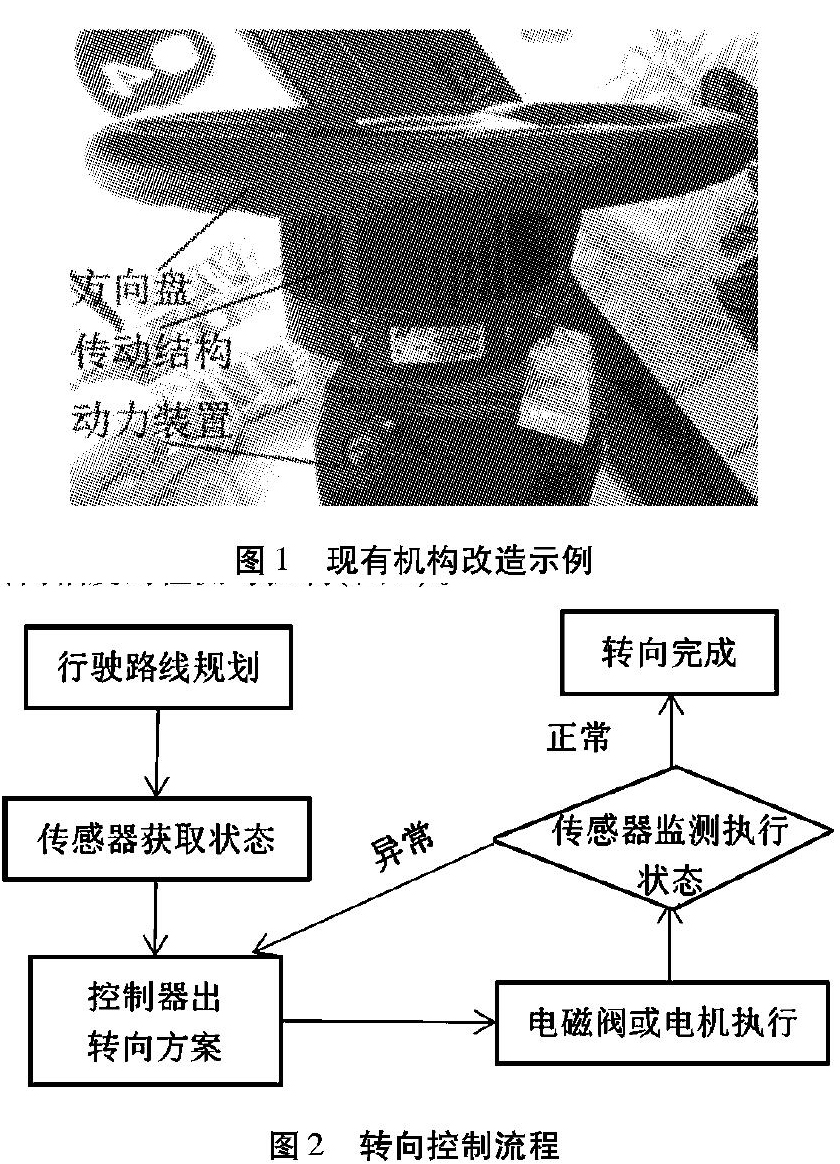
近十年来,我国对于农业机械的转向控制技术进行了大量的研究,也取得了十分显著的成果,尽管相关技术还处于研究阶段,自动转向控制技术作为农业机械发展的必须技术,其在农业机械上的应用势在必行。我国对于农业机械自动转向技术的典型研究如下:(1)西北农林科技大学研究了拖拉机行驶路线自动变更技术与机械结构设计,利用伺服马达控制方向盘并结合多种传感器实现行驶路线的改变;(2)中国农业大学研究了关于电控液压动力自动转向控制模型,通过两位三通电磁换向阀能够同时实现自动控制与人工控制,并利用步进电机实现对前轮的转向驱动;(3)中国科学院沈阳自动化研究所通过加装减速齿轮的方式对进口联合收割机进行改造,通过步进电机完成转向驱动,形成了现有农机的改造方案;(4)中国农业机械化科学研究院对现有拖拉机通过加装电液比例换向阀的方式实现了控制轉向和转速的要求等。现阶段研究的趋势趋向于通过控制技术与步进电机的结合,实现现有农机的改造升级(图1),而未来的农业机械自动转向技术必将是多学科广泛融合的产物。
2 农业机械转向自动控制主要装置
根据现阶段农业机械的发展情况和驾驶系统的主要结构,改良并设计自动转向控制的机械结构和方案是实现相关功能研究的主要方法。农业机械转向自动控制基本装置由液压油泵、动力电机、液压比例换向阀、角度传感器、溢流阀、转向液压缸、其他辅助原件等构成。实际工作中通过传感器获取机械状态,并将相关信息传递给控制系统的处理器,经运算和处理后转换为农业机械的转向控制方案,进而控制转向轮向不同方向的转向动作,同时实现转向幅度的检测与控制(图2)。
(1)液压泵。作为农业机械自动转向系统的动力元件之一,可通过柴油机或电机驱动,通过从液压油箱内部吸取油液,使之形成一定压力后排出,从而将动力传递给执行元件的工作部件。
(2)转向液压缸。通过将液压能转换为机械能实现指定元件的位移,在农机转向系统中,利用控制器将液压油输送进转向油缸的不同腔体内,能实现不同方向的转动,进而实现前轮的转向。
(3)动力电机。是液压泵的动力元件,部分自动驾驶装置也会使用电机作为方向盘或转向轴的驱动力。
(4)角度传感器。用以检测轮胎的转动角度,以获得农机的实际状态,为自动驾驶提供参数依据,并验证转向动作的执行情况。
(5)电磁阀。属于电磁控制技术的工业设备,能有效实现流体的自动化控制,在农机转向的液压系统中,作为液压油的方向、流量、速度和其他的参数的调整工具,具有较高的精度和灵活性。
(6)溢流阀。能够有效控制系统压力,当系统压力超过合理值时,起到溢流、稳压的安全保护作用。
3 转向自动控制常用方案
3.1 传统液压技术升级方案
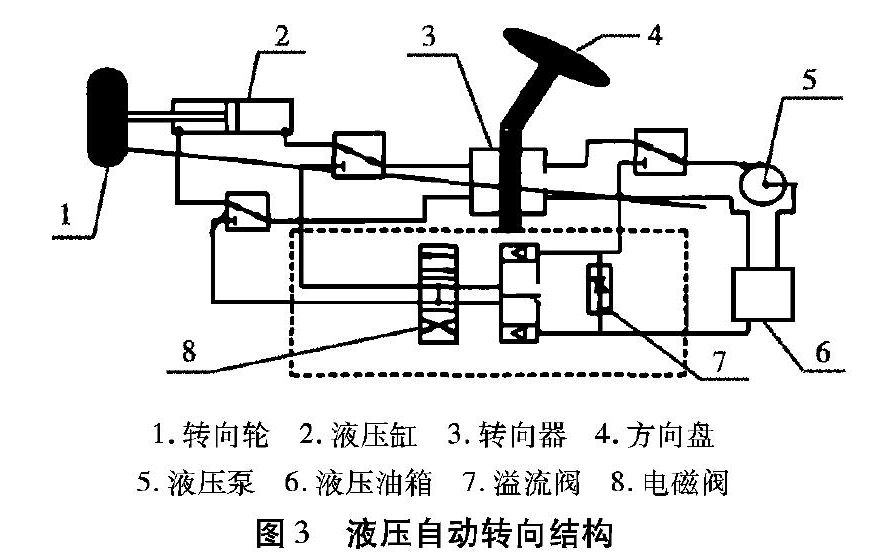
通过对现阶段传统农机技术进行研究,以农机转向的传统结构为依托,利用其液压助力转向技术,在原农机转向系统中增加液压控制装置来对液压转向机构进行驱动,其基本原理如图3所示。在农机正常工作模式下,可进行人工操作和自动驾驶的选择,当电磁阀不通电时为人工操作模式,要进行自动转向,可通过自动模式进行切换,此时电磁阀工作实现模式更换,转向系统会从普通的手动控制油路变换到自动控制油路进行工作。转向控制器通过接收多种传感器获取的相关信号,经分析和处理后控制换向电磁阀改变油路实现对前轮转向的控制,同时与电控比例阀配合实现转向速度与行驶速度的合理化实施,并通过传感器监测确保转向功能的妥善实施。
在自动行驶过程中,若没有转向命令,此时换向电磁阀处于不工作状态,液压油会通过三通压力补偿器流回油箱中。当农机需要进行转向时,控制器会根据预先方案或实际情况控制换向电磁阀实现转向功能。当三位四通换向阀控制油路时,左位左转,右位右转,油路控制后根据控制器计算得出的转角所需流量大小,三位四通比例流量阀完成对响应油路流量的控制。比例阀的流量通过节流阀开口的程度来实现,当需要调整流量大小时,通过电流变化控制电磁铁的磁力大小,磁力变化导致控制阀芯的位置变化,进而实现节流阀开口的幅度变化,现代化的流量阀已经能够实现流量的精细化控制。
3.2 电机驱动方案
电机驱动分为两种方式,一是电机驱动方向盘工作,二是电机驱动转向轴工作。使用步进电机驱动方向盘作业,主要是利用摩擦或齿轮传动的方式带动方向盘转动,此方案的工作部件包括步进电机、摩擦轮或齿轮副、支架、护罩等。这种驱动方式对农业机械原结构的改动小,但摩擦传动存在打滑问题,效率低且使用寿命短;齿轮传动虽然可靠性更好,但为减少传动结构占用的空间和降低传动过程中电机的扭矩负担,通常采用的传动比很大,导致使用过程中存在着控制繁琐、精度不高、反应延迟等问题。通过电机驱动转向轴工作通常采用直驱电机作为转向动力源,能够通过控制电机的转向和转速来实现自动转向的功能要求,与电机驱动方向盘相比,直接对转向轴进行驱动有效提升了控制精度并简化了机械结构,具有一定的推广价值,但只能适用于对反应速度要求不高的场合。
3.3 全液压转向技术
全液压自动转向主要由换向阀、全液压转向器、步进电机等结构组成。与普通液压控制类似,在自动行驶状态下,当不需要转向系统工作时,液压油经全液压转向器中位直接流回油箱中,当需要全液压转向器控制农业机械转向时,此时根据需要的转动角度和实际转动的角度之间的差值,由自动转向控制器将需要流量大小传递给步进电机,通过步进电机联动全液压转向器转动,实现转速的改变,从而完成液压流量的变化。全液压转向技术具有较高的控制精度,能够可靠的完成转向工作,具有良好的技术可移植性,由于采用了步进电机驱动全液压装置,反应仍会存在一定的延迟。
4 结束语
农业机械的转向自动控制技术经过多年的发展,已经具备了丰富的技术储备,能够在一定程度上完成自动转向的基本要求。但大多数的技术均依靠成熟农机的机械结构,利用多学科结合的整体技术突破相对较少,科技含量和稳定性仍有待提高,这还需要相关研究人员的不懈努力才能实现。
参考文献:
[1] 黎永键, 赵祚喜, 黄培奎, 等. 东方红拖拉机自动转向控制器设计及试验[J]. 农业工程学报, 2015, 31(Z2):93-99.
[2] 张智刚, 罗锡文, 李俊岭. 轮式农业机械自动转向控制系统研究[J]. 农业工程学报, 2005, 21(11).
[3] 代峰燕, 王书茂, 赵颖, 等. 视觉导航拖拉机自动转向控制系统研究[J]. 农机化研究, 2006(10):140-143.
[4] 尤文宽. 拖拉机播种作业自动转向控制系统的设计与研究[D]. 石河子:石河子大学, 2014.
[5] 连世江, 陈军, 贾海政, 等. 基于PID控制的拖拉机自动转向系统[J]. 农机化研究, 2009, 31(6):211-213.
