一种输电线路上的存在异物清除机器人装置
孙梅 张成研
摘 要:阐述了输电线路异物清除机器人在电力检修与维护中的重要性,通过分析比较国内外研究机构在输电线路异物清除机器人领域的研究成果与缺失,以此研究出一种输电线路上的存在异物清除机器人装置,以期达到更具实用价值性的目的。
关键词:输电线路;异物清除机器人;装置
中图分类号:TP242文献标识码:A
doi:10.14031/j.cnki.njwx.2019.08.010
作者简介:孙梅(1974-),女,湖南常德人,副教授,工学硕士,研究方向:机械电子工程,E-mail:[email protected]。
0 引言
随着社会的发展,科技的进步,在现代化的生产工艺中,已逐步迈向自动化替代人工作业,以此来降低劳动强度,提高生产效率,更加提升企业的竞争力,也只有这样,我国的工程机械自动化应用和发展才能够真正健康的走上高质量、高效益以及绿色制造之路。
电网作为能源支柱,它关系着整个社会的稳定发展。然而常有由于各类活动产生的异物缠绕在输电线路上,发生电力事故的次数不断增多,线路异物清除工作占电力维护的比重显著增加。带电清除异物项目是带电作业中安全风险最高的,研究一种输电线路上的存在异物清除机器人装置至关重要。
1 在电力检修与维护中的重要性
机器人是自动控制领域的高新技术,涉及到了多学科领域,它可以通过编程完成各种预期的任务,在自身结构和性能上有了人和机器的各自优势,真正体现出了人工智能和现代机械制造生产体系适应性。
输电线路是用变压器将发电机发出的电能升压后,再经断路器等控制设备接入输电线路来实现的,具有架空输电线路和电缆线路两种结构形式。架空输电线路由线路杆塔、导线、绝缘子、线路金具、拉线、杆塔基础、接地装置等构成,架设在地面之上。现有的输电线路异物清除装置通常是通过无人机进行喷火烧除的方式,这样容易造成燃烧的二次污染,同时进行剪切式清理装置的传动结构复杂,容易在清理过程中发生故障,且不能对电线进行包围式清理,容易造成疏漏。为保证线路安全运行,解决作业人员人身安全采用无人机是当代电力检修与维护的必然趋势,针对现有的结构及缺失予以研究改良,提供一种输电线路上的存在异物清除机器人装置,以期达到更具实用价值性的目的。
2 国内外研究现状情况分析
目前, 国内外的很多输电线路运维单位均在探索研究异物清除新方式, 有以下几个方面:
① 输电线爬行烧除机。爬行烧除机是以电池和电机作为原动力,五行轮带动履带转动, 履带上橡胶在导线上摩擦从而推动机器在导线上行走,然后利用高压输电线材的燃点远高于异物的燃点用脉冲式喷火方式处理异物,燃烧后留下的焦炭很脆且疏松,受压后极易破碎脱落,此方法已经投入使用。但爬行烧除机重量较重,体积较大,对于无人机班组出行任务携带不便,并且需要工作人员爬上铁塔,将爬行烧除机安放在输电线上,耗时耗力。
②电动剪刀。设计一个带有橡胶轮的电动平台,将机械剪刀安装在平台上。利用无人机将平台挂在输电导线上, 通过地面遥控使平台在导线上来回移动。当平台靠近异物时, 遥控电动剪刀将异物切断。电动剪刀安装在无人机平台上,对飞控手的操作水平要求较高,且需要反复应用多次才能够清除,工作效率较低。
③ 激光清除异物。利用高功率密度激光束照射被切割材料,使材料很快被加热至汽化或融化温度并形成空洞,随着光束对材料的移动,孔洞连续形成宽度很窄的切缝,完成对材料的切割。利用产生的高温将异物熔断,达到清除异物的目的。但由于旋翼无人机载重有限,大功率激光设备太重,小功率激光温度又相对较低, 需要长时间持续的对焦在固定点,才能够使异物燃烧。
3 装置研发
现有的输电线路异物清除装置通常是通过无人机进行喷火烧除的方式,这样容易造成燃烧的二次污染,同时进行剪切式清理装置的传动结构复杂,容易在清理过程中发生故障,且不能对电线进行包围式清理容易造成疏漏。有鉴于此,针对现有的结构及缺失予以研究改良,设计一种输电线路上的存在异物清除机器人装置,以期达到更具实用价值性的目的。
3.1 结构
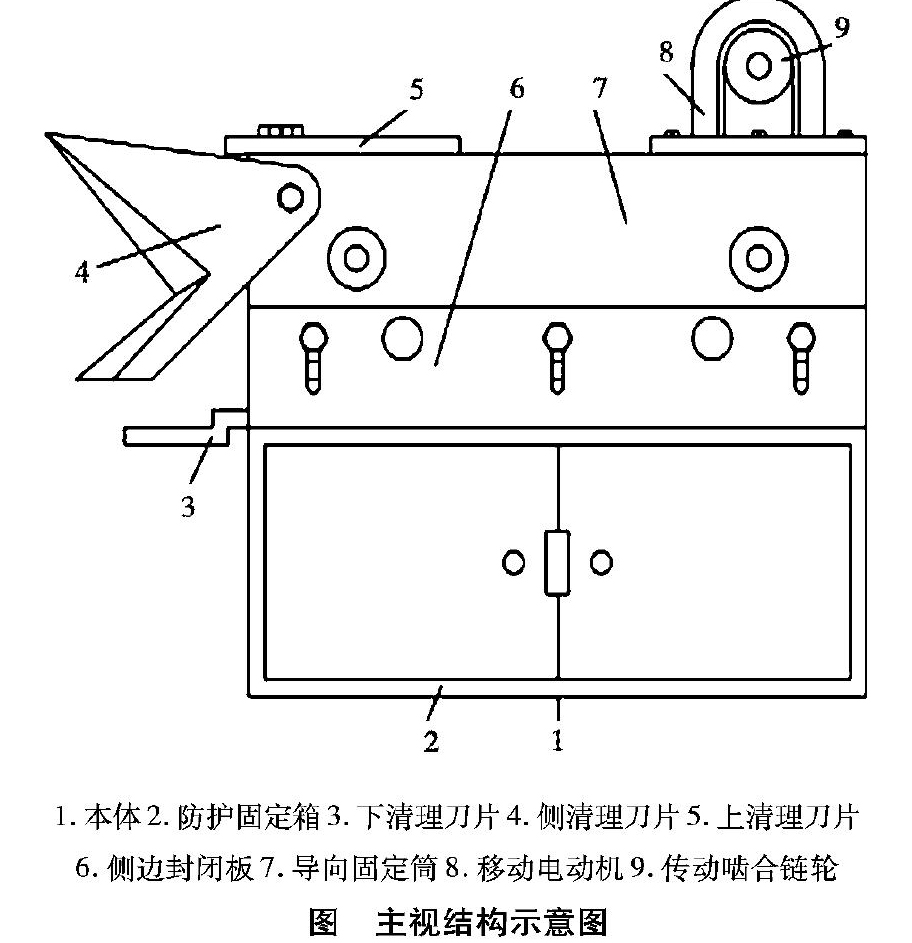
1.本体2.防护固定箱3.下清理刀片4.侧清理刀片5.上清理刀片6.侧边封闭板7.导向固定筒8.移动电动机9.传动啮合链轮
机器人装置结构如图所示,还包括右移动导向轮、左移动导向轮、蓄电电池箱和遥控调节箱等结构。
装置本体顶部设置有导向固定筒,导向固定筒底部后方通过螺栓固定安装有防护固定箱。
防护固定箱内部左侧固定安装有蓄电电池箱,内部右侧固定安装有遥控调节箱;防护固定箱前方端面左右侧均设置安装有防护封闭门,顶部左侧后方通过螺栓固定安装有刃口向左的下清理刀片。
导向固定筒前方端面下部通过三处螺栓固定限位安装有侧边封闭板,左侧前后端面上部通过螺栓固定安装有刃口向左的侧清理刀片;导向固定筒顶部左侧通过螺栓固定安装有上清理刀片,右侧通过螺栓固定安装有移动电动机;导向固定筒右侧内部通过轴承固定安装有右移动导向轮,右移动导向轮前后两端均固定安装有两处传动啮合链轮;导向固定筒底部中心设置有左右方向的放入开口槽,放入开口槽前方设置有防护凸起板;导向固定筒前后壁左右两侧均开设有固定安装孔,导向固定筒右侧顶部前后均开设有链条穿过槽,方便输电线的放入,对内部输电线进行防护,方便内部右移动导向轮和左移动导向轮的固定安装,方便链条穿过进行动力的传递。
移动电动机前后轴端均固定安装有传动啮合链轮,电动机固定座前后均开设有链条穿过孔槽;移动电动机前后两端传动啮合链轮均通过链条与右移动导向轮前后两端外侧传动啮合链轮相连接,导向固定筒左侧内部通过轴承固定安装有左移动导向轮;左移动导向轮前后两端均固定安装有传动啮合链轮,右移动导向轮前后两端内侧传动啮合链轮均通过链条与左移动导向轮前后两端传动啮合链轮相连接;右移动导向轮和左移动导向轮导向沟槽两侧均通过螺钉固定安装有毛刷,且遥控调节箱均通过电线与蓄电电池箱和移动电动机相连接。
侧边封闭板底部向后弯折九十度形成L形板,侧边封闭板左右两侧和中间均开设有限位移动导向槽,侧边封闭板左右两侧上部均开设有升降推拉圆孔,方便对自身移动进行限位,方便通过螺栓进行限位固定和移动导向,方便使用人员将侧边封闭板向上升起和降下封闭。
下清理刀片左侧刀刃部分设置有向下的折弯,右侧设置有带三处安装孔的矩形板,方便内部输电线的放入,方便自身的固定安装;上清理刀片内部中间设置有三处固定安装孔,左右两侧折弯处均开设有切割刃,方便自身的固定安装,方便根据不同清理物品来更换刀刃的朝向。
3.2 效果分析
(1)导向固定筒的设置,方便左侧清理刀片的固定安装,使清理刀片在输电线路上下和前后形成包围式清理,同时方便内部右移动导向轮和左移动导向轮的动力传递,方便输电线从底部放入右移动导向轮和左移动导向轮导向槽内部。
(2)侧边封闭板的设置,方便通过螺栓进行限位固定,方便自身上下移动,对内部输电线进行防护,防止装置本体脱离输电线掉落,同时不妨碍输电线的放入和取出,使装置本体的安装和拆卸更加方便快捷。
4 结论
在许多生产领域的使用实践证明,一种输电线路上的存在异物清除机器人提高了生产自动化水平和经济效益,進一步改善了工人的劳动条件,解决了现有的机器人在使用时存在作业姿态不可调节、固定基座高度不能调节、旋转定位调试速度慢等问题。实现机电液系统有机地高度集成,充分发挥各自优势,将是今后研究的主要方向。对输电线路上的存在异物清除机器人装置研发有很大的促进意义。
参考文献:
[1] 杨志成,冯豫韬,孙力红,等.高压输电线路清杂物机器人清除机构设计及其控制系统[J].现代制造工程,2018(9).
[2] 孙国富.高压输电线路施工中存在的问题及对策[J].山东工业技术,2018(15).
[3] 陈果.220 kV高压输电线路的防雷设计分析[J].低碳世界,2016(35).
