基于Proteus的直流电机控制教学探索
陈新兵 胡维 龙晓莉 张方樱
摘? 要 分析新工科对跨学科融合创新要素的需求,提出在电工电子实习教学中引入电机控制的方法。采用成果转化的方式为实习教学提供直流电机控制实例,使用Proteus软件完成硬件设计、软件编程与协同仿真,验证Proteus仿真设计的正确性与高效率。教学应用表明,通过实习向低年级学生普及电机控制的目标已实现,新工科人才培养质量显著提升。
关键词 新工科;电工电子实习;电机控制;Proteus;协同仿真
中图分类号:G642? ? 文献标识码:B
文章编号:1671-489X(2020)10-0031-04
Abstract In order to promote the construction of new engineering course, how to lead DC motor controller into electrical & electronic?practice is suggested. Based on demand analysis, specific measures are taken to carry out reforms such as transfer of technology, tea-ching method and virtual test platform. Furthermore, how to design the system and finish cooperative simulation by proteus is presented in details. The simulation and application indicate that proteus designis correct and effective, which popularizes motor control in lower-classmen, and the quality of new engineering talents training is pro-moted.
Key words new engineering; electrical & electronic practice; motor controller; Proteus; co-simulation
1 引言
2017年,國务院办公厅印发《关于深化产教融合的若干意见》,强调学科专业的实用性、交叉性与综合性,注重信息通信、电子控制、软件设计等新技术与传统工业技术的紧密结合,为新工科建设提供了思路[1]。电机控制作为电子控制技术的关键内容,现在已广泛应用于各行业,特别是机器人等新兴行业,成为传统工科专业推进新工科建设的重要元素。
电工电子实习是多数工科专业低年级学生必修的学科基础课程[2],培养学生的实践动手能力与工程素养,支撑综合实践,促进课外创新。鉴于新工科建设与课外跨学科融合创新对电子控制技术的需求,实习课程组将原属于电气专业高年级的直流电机控制,纳入电工电子实习新工科示范课程建设计划,以实例方式普及到其他工科尤其电类专业。
Proteus是一款高效的单片机及其外围电路仿真开发工具。相对于其他软件[3-5],Proteus提供了更强大的电机驱动模型库,在软硬件协同设计仿真领域具有明显优势,可显著提高电机驱动开发效率。在电工电子实习中探索引入Proteus仿真设计技术,简化电机控制教学,降低课外跨学科融合创新门槛,已成为当前实习教学改革的重要任务。
2 设计仿真
直流电机广泛应用于各类智能设备,根据控制系统指令执行动作,如启停、进退与加减速等,是大学生科技创新活动的重要元素。实习课程组利用长期指导实习教学与课外创新的优势,采用成果转化的方式,将全国智能车/机器人竞赛成果转化为实习教学内容,开发了专门的工程实训车及其电机控制系统。采用Proteus仿真工具开发电机控制系统流程为:建立工程→原理图绘制→软件编程→代码加载→协同仿真→优化。大体分为系统设计、硬件电路、软件编程与协同仿真四个阶段。
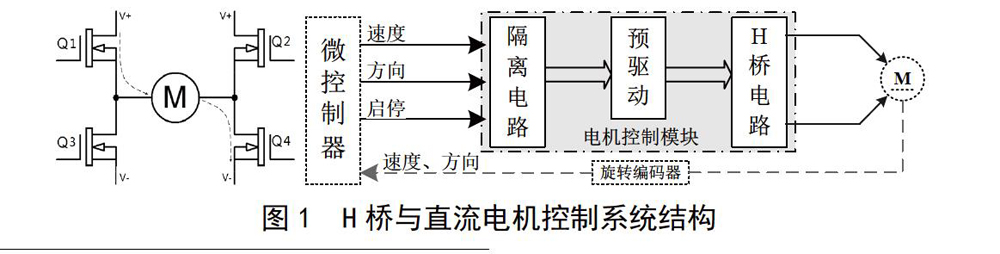
系统设计? 电机控制系统采用预驱动芯片+外置H桥方案设计,H桥由四个N沟道MOSFET搭建,相比集成H桥的驱动芯片,具有导通内阻小、驱动电流大、发热小等优势,满足竞速对加减速、爬坡、转弯、响应速度与发热控制等方面的性能需求;但电路复杂度较高,通过Proteus可解决开发效率问题。采用H桥设计的电机控制系统结构如图1所示。
核心电路由隔离电路、预驱动器和H桥电路三部分构成,对PWM调速信号进行功率放大,其中隔离电路用于保护前级主控电路,预驱动器负责H桥的通断控制,H桥完成功率输出。系统工作时,微控制器产生占空比可调的PWM信号,经由设计的电机控制模块,控制电机的启停、转速与转向,通过旋转编码器检测电机实时状态,构成闭环控制回路,确保智能车/机器人等智能设备沿规划路径平稳运行。
硬件电路? 以7.2 V直流电机为被控对象,根据系统框图设计单电机控制系统,整个系统采用7.2 V镍氢电池供电。Proteus绘制硬件原理图时,先在Proteus中添加核心IC及其周边分立元件,然后布局元器件,最后进行电气连线,绕线处改以网络标号连接,要求图纸层次分明、简洁易读。整个原理图采用模块化设计,由H桥驱动电路与外围电路构成。
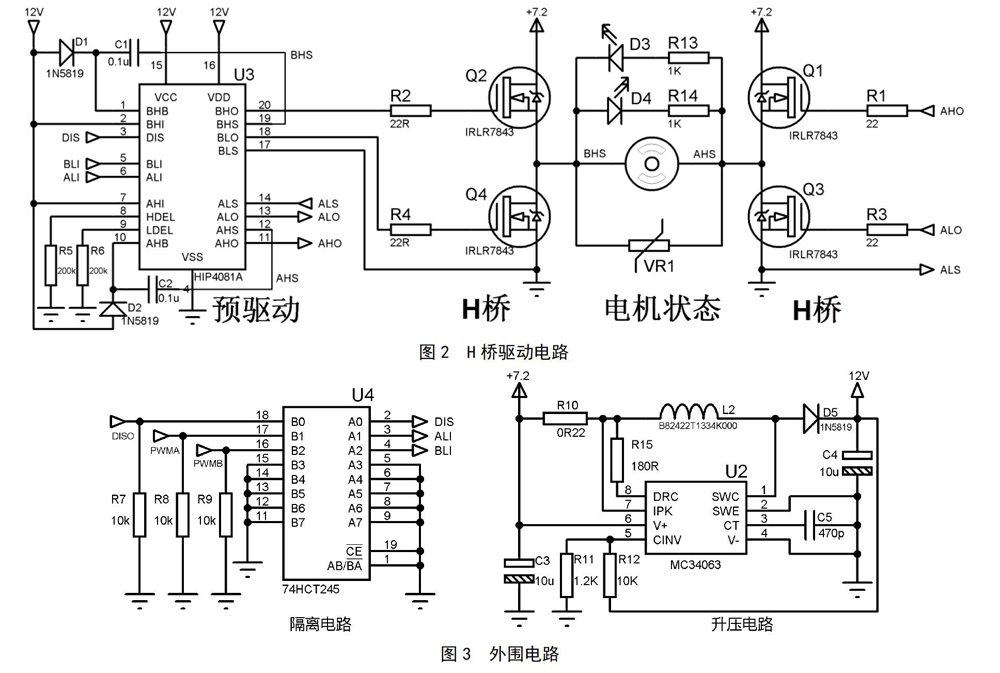
1)H桥驱动电路。选用全桥芯片HIP4081作为H桥预驱动,采用LR7843型MOSFET搭建H桥,内部集成反向恢复二极管,为瞬时反向电流提供快速泄放通道。该方案确保了驱动性能,简化了电路设计,避免了共态导通问题。图2是Proteus绘制的H桥驱动,其工作原理是:HIP4081接入PWM调速信号,输出H桥MOSFET通断信号,控制电机工作。
HIP4081是一款双极式全桥预驱动芯片,由引脚ALI和BLI输入一对互补PWM调速信号,引脚ALO、AHO和BLO、BHO输出两对半桥控制信号,驱动四个N型MOSFET,其中低边输出与相应输入同相,高边则反相。PWM信号反相功率放大后传输至电机,电枢两端平均电压UAB=(1-2Duty)US,其中Us为电源电压,Duty为PWM占空比。
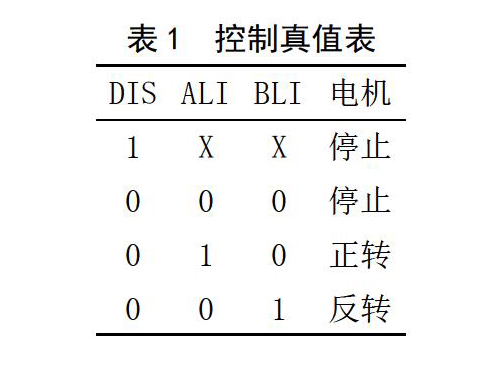
因此,电机转向PWM信号占空比高的一侧,转速由占空比之差决定。DIS为HIP4081芯片输出使能信号,DIS=0时,HIP4081开启调速功能;DIS=1时,关断H桥输入。逻辑控制真值表见表1。
2)外围电路设计。H桥驱动的工作,须设计相应的隔离电路和升压电路,Proteus绘制原理图如图3所示。
隔离电路选用芯片74HCT245,隔离微控制器与HIP4081,防止H桥高压流入主控。来自微控制器产生的电机控制信号,经74HCT245缓冲后,控制H桥驱动电路。
升压电路选用电源芯片MC34063,把外部电池7.2 V提升至12 V后再供电,满足HIP4081及其外置电荷泵的电压需求,确保H桥高边MOSFET完全开启。此时H桥导通内阻低至6毫欧,发热基本可忽略,驱动性能得以充分发挥。
软件编程? 微控制器选用ATmega128单片机,通过引脚OC3A和OC3B输出占空比可调的PWM信号,经由设计的电机控制系统完成启停、转向、进退与加减速动作。电机控制软件流程见图4。
软件编程时,先根据系统需求,采用ICCAVR/Applica-tion Builder向导快速初始化硬件,使定时器3工作于快速PWM模式,配置其比较输出寄存器COM3A1:0=2,COM3B1:0=3,OC3B引脚即可输出与OC3A互补的PWM波形,满足电机控制系统测试的信号需求。
利用Application Builder向导生成的C程序框架,根据软件流程图编写控制算法,工作流程包括初始化、数据采集、模式匹配、控制决策四部分。程序执行时,ATmega128先初始化硬件,然后进行数据采集与处理,根据信号变化进行模式匹配,进行控制决策,由电机执行相应动作;最后结束本次循环,进行下次数据采集,生成Proteus仿真所需的.cof文件。
协同仿真? Proteus搭建的功能仿真测试平台,由主控电路、电机驱动及其外围电路组成,如图5所示。为动态呈现仿真效果,LED、电机须选用带动画的元件模型,并添加示波器、电压探针、数码管等调试仪器,实时监测信号变化,快速定位问题,为完善设计提供依据,借助Proteus提供的单步调试工具,解决硬件问题于设计初期,提高开发效率。
ATmega128加载之前编译生成的.cof文件,即可进行Proteus软硬件协同仿真。图5是电机工作于10 kHz时的仿真效果,此时升压电源输出11.8 V,电荷泵峰值输出17.8 V,确保了H桥驱动电路工作正常。在仿真过程中,五个控制按键分别模拟正转、反转、加速、减速和停车指令,ATmega128接收并识别后,输出相应PWM信号,经H桥驱动电路放大后,控制电机执行相应动作,并通过动画直观显示运行状态。仿真表明,电机各项控制功能皆达到设计要求。图5是电机反转情形,按下反转按键,主控正确识别后,通过引脚PWMA输出0.3占空比的PWM信号,PWMB与之互补,控制电机逆时针转动,LED指示转向,数码管显示占空比,示波器监测波形见图6。
波形反映了H桥驱动的信号跟踪放大能力。主控产生的一对PWM信号,在传输至电机两端的过程中,实现反相功率放大,控制逻辑符合设计要求,验证了Proteus协同仿真的高效率。PWM频率较高或电路复杂时,Proteus仿真须较长时间到达稳态,仿真动画会有滞后卡顿现象,上述模块化设计与分步调试方法,提供了一种科学高效的快速仿真验证方案。
3 应用效果
广州大学电子实习中心承担全校12个专业的电工电子实习教学与课程建设任务,利用长期指导跨学科赛事的优势,根据新工科需求,成功将科技竞赛成果转化为实习教学内容,开发了工程实训车及其电机控制系统,建设了基于Proteus的MOOC在线教学资源,立足课内实践,面向课外创新,2017年起投入实习教学,形成课赛结合、虚实协同、持续培养的教学模式,现已建成校级新工科示范课程,整体提升了学生的跨学科工程实践能力,成为促进课外科技创新活动的入门范例。
4 结语
利用Proteus软件实现对电机控制系统的仿真测试,解决了在低年级学生中普及电机控制的难题,成为电工电子实习建设新工科示范课程的重要支撑,对其他集中式实践教学环节建设新工科课程也有一定的借鉴意义。
参考文献
[1]王海舰,袁嘉惠,吴立韬,等.新工科建设背景下的学科交叉融合机制研究与探讨[J].课程教育研究,2019(12):
7-8.
[2]夏慧雯,徐少华,明宏,等.基于新工科的电工电子实习教学改革与探索[J].电子世界,2019(12):48-49.
[3]李冲,仇飞.基于Proteus的虚实结合通信电子电路实验教学[J].中國教育技术装备,2019(18):94-96.
[4]顾玲芙.各类软件在电子电路设计教学中的运用[J].电子制作,2013(20):132.
[5]刘允峰.基于Multisim12的电机驱动模块设计与仿真[J].电子设计工程,2014(8):153-155.
