北斗导航系统的移动导航定位终端设计分析
唐永泉
摘要:卫星定位导航技术目前应用极为广泛,与人民生活息息相关,在手机定位、精准授时、汽车导航、智能交通、智能监控、智能家居、国际救援等等领域应用比较成熟。文章介绍了北斗导航系统的移动导航定位终端的分类和北斗定位基本原理、结构;设计了北斗导航系统的移动导航定位终端,给出了设计的结构、硬件电路以及操作系统。
关键词:卫星定位;北斗导航系统;移动定位终端;设计
1.移动终端定位导航系统的研究与分析
目前,多是按照移动终端使用范围对移动终端定位导航系统进行分类,主要包括室外定位和室内定位。室外定位技术可分为卫星定位技术与惯性导航器定位技术两种。室内定位系统多采用无线移动通信网络进行定位可分为超声波、红外、蓝牙、射频识别(Radio Frequency Identification,RFID),WiFi、超宽带定位技术等。
根据定位策略可把定位技术分为网络定位和移动终端定位技术两种。网络定位系统包括接收信号方向定位(AOA)、场强信号定位(RSS)、信号传播时间定位(TOA等),这些技术主要依靠强大的网络通信能力,在网络端接收移动终端发射的信号,利用算法估算移动终端的定位信息,通过移动通信网络把其位置信号再发送给移动终端系统。移动终端定位技术包括基站定位(Cell ID)、卫星定位,通过移动终端接收基站发射的带有基站位置等特征信息的信号,按照约定的算法估算出移动终端的定位等信息。
而根据定位原理又可分为临近关系定位、三角测量定位和场景分析定位等定位技术。三角测量定位技术又可细分为传播时间定位、能量衰减定位、角度定位等。
2.北斗卫星定位系统定位原理
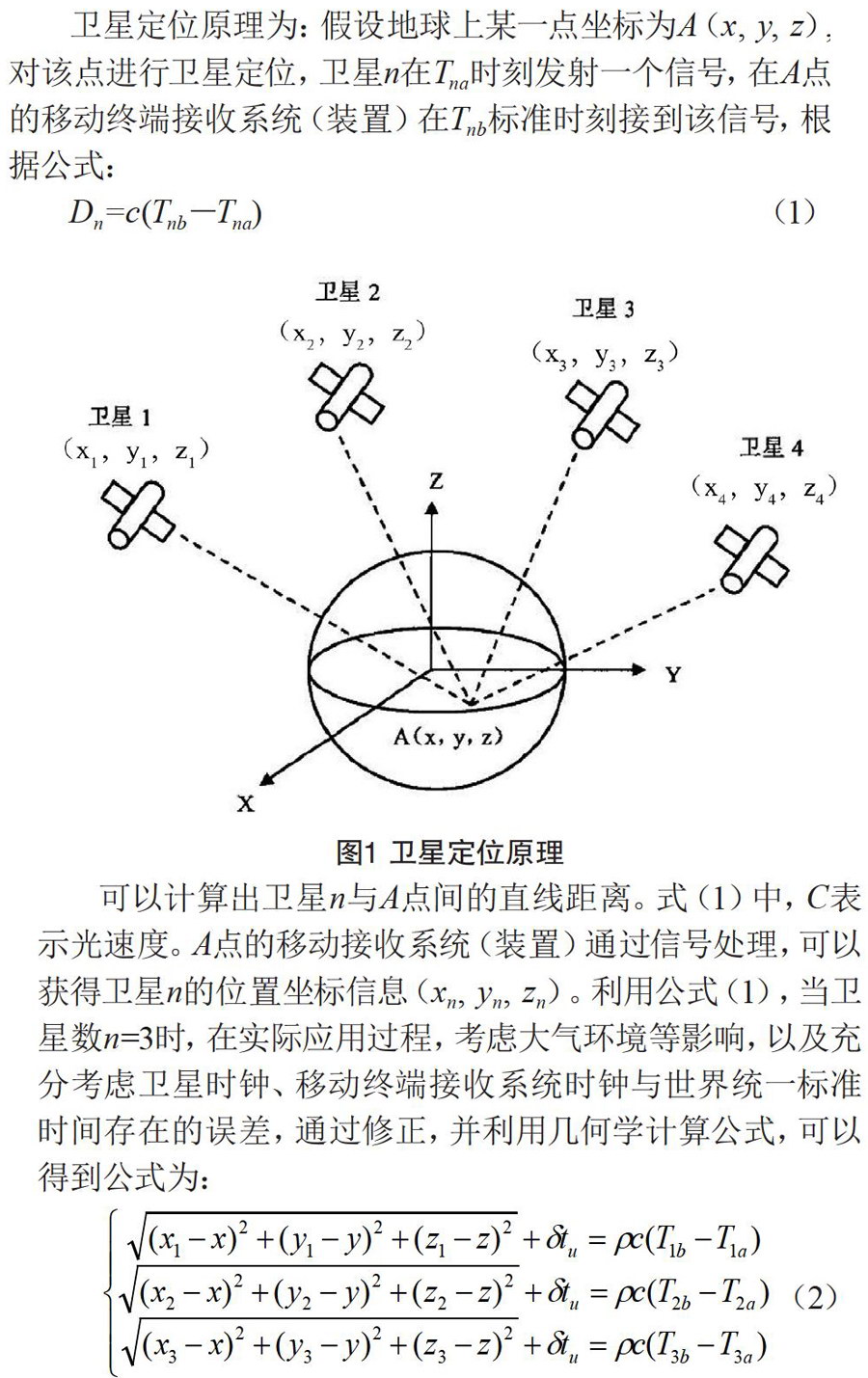
卫星定位技术依据同一坐标系空间内己知的多个点的位置坐标数据,利用空间距离交会的方法计算未知点的坐标值,实现定位、导航功能。2000年,北斗卫星定位系统采用中国大地坐标系(China Geodetic Coordinate System,CGCS2000),CGCS200C唑标系以地球质心作为原点,x轴指向国际地球自转服务机构制定的参考子午面和垂直于z轴的赤道面交点的方向,z轴也是由x轴、Y轴利用右手法则确定,指向国际地球自转服务机构指定的地球参考极方向。如图1所示。
公式(2)中,δtu表示移动终端的接收时间差,p表示误差修正系数。根据数学计算要求,在卫星数n≥4时,可以计算出δtu的值以及A点的准确定位坐标(z、y、z),从而实现卫星定位及导航功能。
北斗卫星定位系统结构分为空间段、地面段、用户段三部分。空间段由5颗静止轨道卫星、27颗中地球轨道卫星和3颗倾斜同步轨道卫星,共计35颗卫星构成。其中,中地球轨道卫星约在21600km高度运行;静止轨道卫星在约为35810km高度运行,定点分布在赤道面的58.75°E,80°E,110.5°E,140°E,160°E位置上,27颗中地球轨道卫星均匀分布在3个轨道面上,相邻轨道面之间的夹角为120°;3颗倾斜同步轨道卫星约在35900km高度运行,且分布在3个轨道面上。空间段卫星主要接收地面段注入站注入的导航电文、卫星星历、差分完好性等信号信息,计算处理为北斗卫星信号,并持续不断地把这些信号发送给地面接收端。
地面段由主控站、注入站、监测站组成。主控站时系统的核心,负责管理和控制北斗定位导航系统,其功能是从监测站接收地面环境参数,进行计算处理后生成北斗卫星的导航电文及差分完好性信息,最后发送给注入站。注入站负责发送导航电文、差分完好性信息等给北斗卫星,控制管理北斗卫星的正常工作。监测站负责跟踪、监测、接收北斗卫星信号,并转发给地面主控站,同时提供北斗卫星时间同步参考。用户段即移动北斗卫星定位导航终端,负责接收、处理北斗卫星信号,获得用户需要的高度、经纬度、速度、时间等定位、导航信息。
3.北斗定位导航系统移动导航定位终端设计
3.1北斗定位导航系统移动导航定位终端结构
北斗定位导航终端采用移动式设计开发,采用独立的操作系统和良好人机界面设计,其特点为体积小、重量轻、交互友好、安全性高,能够实现全天候准确定位、通信等。子模块功能包括用户界面、通信、定位、地图显示、地图搜索、电子地图、系统加密、系统维护等。用户界面采用表单或字符输入方式接收用户指令,并以图形、文字等方式返回数据。通信功能主要是接收卫星信号,向主控模块传递信息等。根据用户选择的定位方式得到移动终端所出的准确坐标。地图显示可以提供区域地图、用户当前位置地图等地图信息,在用户进行方向选择、动态移动、拉近拉远等操作时,实时动态进行信息变化;系统可以根据用户输入的某一地点的信息,搜索该点位置并精准显示,在用户输入出发地和目的地后,通过路由算法找到最短路径,提供导航地图。电子地图模块在于存储地图文件等信息。系统可以使用AES等算法对发送数据进行加密,确保数据的安全性。系统能够根据用户需要对导航终端进行必要的设置,定期备份、更新地图数据,提供所有的地图文件下载接口,设置用户各种操作权限,在软件出现新版本时出现版本更新提示等等。
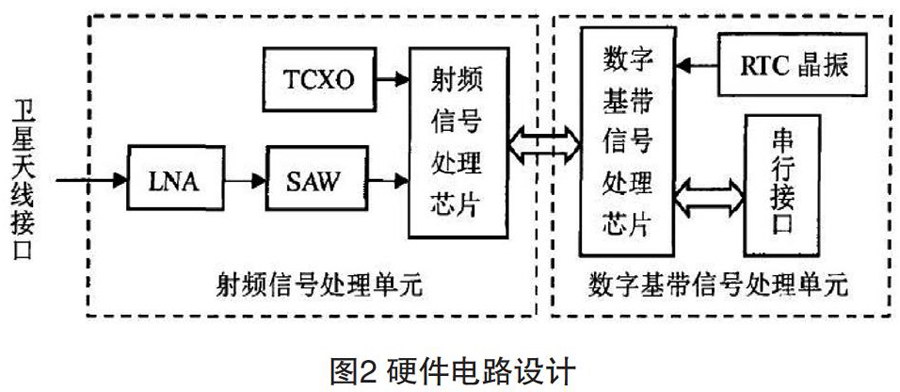
3.2系统硬件设计
本文设计的硬件系统主要包括射频信号处理模块、数字基带信号处理模块和天线接口。射频信号处理模块由射频信号处理芯片电路、噪声放大器(LNA)电路、温补晶振(TCXO)和声表面波滤波器(SAW)电路等电路组成。射频信号处理芯片与温补晶振电路对卫星高频信号进行放大、混频、滤波、ADC转换,输出数字中频信号;噪声放大器实现对卫星信号功率放大;声表面波滤波器电路滤除带外干扰等杂散信号。数字基带信号处理模块主要由数字基带信号处理芯片、串行接口电路、RTC晶振电路等构成,接收上一级数字中频信号并进行解调,获得卫星的伪距、载波相位、导航电文等信息,通过算法进行计算,输出符合标准协议的数据信息;卫星天线接口负责连接北斗卫星信号的接收天线。硬件电路结构如图2所示。
3.3操作系统设计
导航定位终端系统操作系统采用Linux网络系统,具有兼容性、可移植性、开放性、精简性、可定制等特点。嵌入式Linux系统通过引导程序、Linux微内核、初始化进程等进行系统初始化,通过下载源码、建立交义编译环境,配置编译内核,制作文件系统,下载和调试内核LS等环节,方便地将嵌入式Linux移植到硬件平台上,實时动态进行操作系统更新和操作。
4.结语
本文设计的基于北斗卫星移动导航定位终端具备良好的人机界面环境,采用路由算法和有源/无源定位满足客户定位、导航的需要,用户可自由选择终端工作模式,功能齐全,操作简便。
