C#环境下GPS导航定位开发
吴思楠 周佳宇 李珍珍 黄若凡
摘要:随着GPS定位技术、地理信息技术与无线通信技术的发展,智能交通系统应运而生。系统以c#为开K--?-台,提出了基于CPS和MapX的导航定位系统的开发方法。系统使用GPS实时接收信息,通过GPRS DTU wG一8010(无线数据传输器件)将接收到的信息传送到上位机,并利用GIS技术在电子地图上显示出来。文章介绍了系统的总体设计,对硬件和t~i-'t-的设计过程作了简要描述,最后通过验证表明该系统能实时接收车辆信息并定位到地图上。
关键词:GPS;C#;MapX;电子地图
人类社会进入了21世纪,科学技术的发展一日千里,在各门学科的脉络中,信息是很重要的因素,随着全球信息化进程的发展,各行业对信息化提出了更高的要求,对信息化的认识也从原先单纯的数字化转变为数字化和网络化以及无线化相结合。信息化是当今世界发展的大趋势,是推动经济社会变革的重要力量。因此,通过某样器件采集外部信息,并发送到后台监测设备上也成为热门的话题。
近几年来,全球定位系统的迅速发展使得移动目标实时定位成为可能,同时无线通讯技术的发展使得实时控制也迅速发展。本系统利用GPS定位技术和DTU无线传输,并利用C#实时显示接收数据,同时结合MapX在电子地图上进行实时定位。
1 总体设计
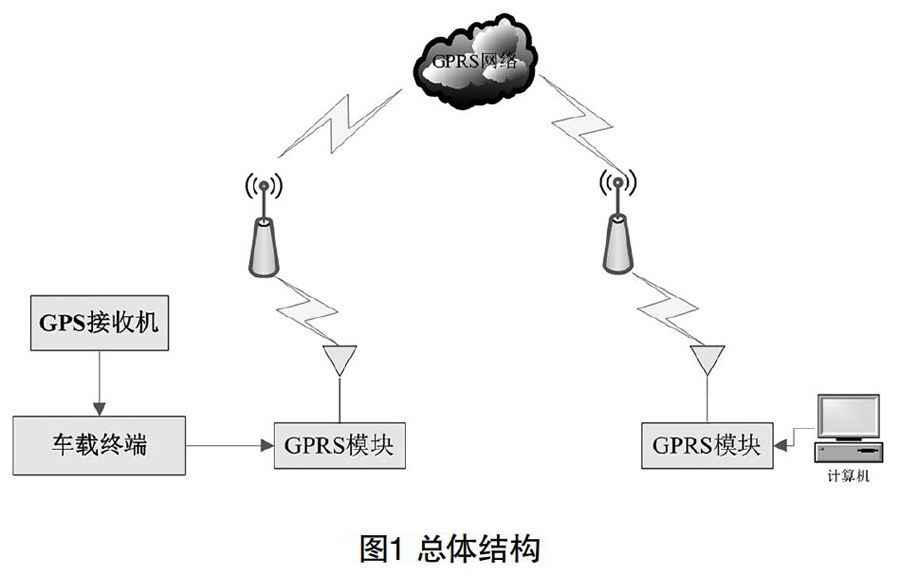
系统的总体结构如图1所示,主要由车载终端、GPRS模块、远程监控中心3个部分组成,车载终端连接的GPS模块接收信息,经GPRS网络与监控中心之间进行数据传输,监控中心接收到信息后在地图上实时显示,对移动车辆进行实时监控。
2 硬件总体设计
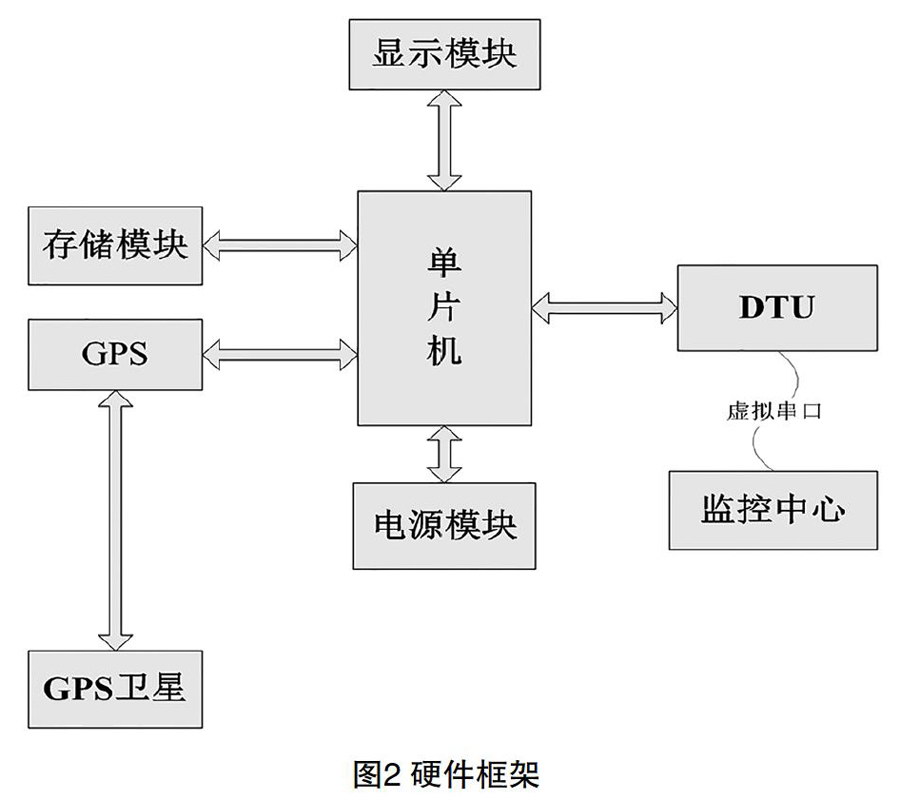
本系统的硬件框架如图2所示,通过GPS接收GPS卫星发射的信息,然后由单片机对信息进行解码,并将信息在LCD显示模块上显示。
为了实现车辆的实时监测,须将信息及时传递到监控中心,图2中的DTU内部所含GPRS模块能通过GPRS网络及时地将信息传递给监控中心。
3 系统软件设计
系统的软件设计包括车载终端的单片机程序设计以及监控中心的监测软件设计。车载终端单片机程序主要功能是解析GPS信息、液晶屏显示以及车载端与GPRS之间的通讯;监测中心的监测软件位于PC机上,主要功能是实现实时定位。
3.1 系统总体软件设计
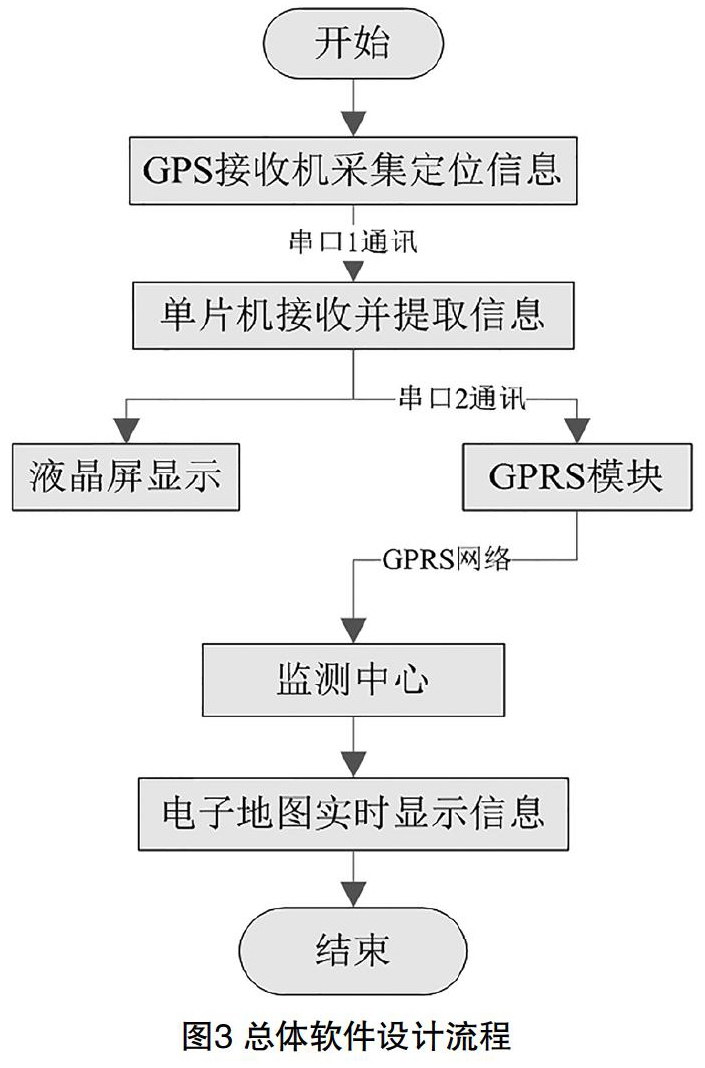
系统总体软件设计流程如图3所示,车载终端主要实现GPS与单片机之间的通讯、车载端与监控中心的通讯。监测中心主要实现车辆的实时定位。本系统通过GPRS网络实现车载终端与监控中心的实时通讯,并利用MapX将接收的信息在电子地图上实时显示。
3.2 车载终端程序设计
车载端单片机流程如图4所示,终端程序采用C语言编程实现。首先启动系统,查看整体系统是否正常,如果正常,则对系统器件进行初始化。车载终端主要包含3个模块:GPS模块、单片机模块、GPRS模块。单片机模块运行在主程序模块下,而GPS模块和GPRS模块主要以中断的方式实现。
4 系统结果展示
导航地图界面如图5所示,首先提取单片机接收到的经纬度信息,系统先记录此信息并在地图上做标注,然后每1000ms接收汽车移动的目标位置,每收到一次信息系统将做一次记录。
5 结语
文章通过C#实现了串口的数据通讯,解决了利用GPS对外部的数据采集,并利用无线传输器件GPRS DTU WG一8010对GPS的数据进行远距离传输,最后能用C#编程在后台实时显示GPS信息,并在地图上显示汽车位置。
