双体小水线面水翼复合型高速船阻力性能研究
王钰元


摘 要:分析双体小水线面水翼复合型高速船(HYSWATH)的阻力变化规律,并在此基础上讨论HYSWATH处于翼航状态时吃水和纵倾角的计算方法,形成了计算HYSWATH翼航状态阻力的方法。并将计算结果和模型试验结果比较,分析产生误差的原因。
关键词:HYSWATH 阻力 翼航状态 平衡
考虑将不同类型的高速船杂交“取长补短”获得更佳的性能,走所谓复合型的道路,是现今高速船的一个发展方向。复合船型的概念考虑了水面舰船现有的三种升力源:无动力静升力(浮力)、有动力静升力(气垫升力)和动升力,采用不同的比例进行组合,形成一个全新的船型。
在小水线面双体船两个片体之间的前后分别设置水翼,并适当选择前后水翼之间的距离,依靠水翼的动升力来承担50%~60%的静水浮力,就可以相应的减小下体排水体积,理论上能够减小35%~45%的湿表面积,45%~55%的兴波阻力,35%~45%的摩擦阻力,从而提高小水线面双体船的航速,同时,由两个水翼所产生的力矩能克服Mank力矩的作用,使小水线面双体船在高速领域也能保证正常安全航行。这种双体小水线面水翼复合型高速新船型(HYSWATH),兼备小水线面双体船和水翼艇的优点,在快速性,耐波性和稳定性方面应能具有更加优良的性能。
双体小水线面水翼复合型高速船(HYSWATH)的阻力主要由船体的阻力,水翼的阻力和船体与水翼之间的干扰阻力这三部分组成。本文主要研究HYSWATH船进入翼航状态后的阻力和运动姿态计算方法,并和模型试验结果进行比较,验证计算方法的可靠性,同时还初步探讨了主要参数对阻力的影响规律。
HYSWATH阻力计算方法
水翼升力的变化导致水翼本身阻力的变化,并改变船体的吃水和纵倾角,同时,翼航姿态(吃水和纵倾角)的变化又导致水翼升力的变化。因此计算HYSWATH船体阻力,要同时考虑其翼航姿态。
HYSWATH船体的阻力比较复杂,包括上体、支柱、主体以及水翼的阻力,而每一部分又可分为兴波阻力、粘性阻力和喷溅阻力等几个部分。低速航行时,水翼的升力较小,上部船体尚未脱离水面,HYSWATH处于体航状态,支柱和主体所引起的兴波阻力在总阻力中的比例很小,可以忽略不计,船体阻力与常规排水型船类似,可用传统的方法进行计算,本文不作重点研究。
随着航速的提高,水翼升力增大,上部船体离开水面,水线位于支柱处,HYSWATH处于翼航状态,船体阻力由主体和支柱的阻力组成,此时HYSWATH阻力的数学模型与小水线面双体船相似,但翼航吃水是一个未知参变量,需要通过求解作用于船体上的力和力矩的平衡方程式得到翼航姿态的吃水和纵倾角以后,才可以应用小水线面双体船兴波阻力的计算方法计算HYSWATH的兴波阻力。
水翼的阻力由翼型阻力、诱导阻力和兴波阻力三部分组成。由粘性引起的翼型阻力包括摩擦阻力和形状阻力;诱导阻力主要是由有限翼展引起的附加阻力;水翼阻力的计算方法已经比较成熟,计算时可参考水翼艇的有关算法。
1、HYSWATH翼航状态平衡方程
以■作为随船平移的坐标系,原点o1位于水面上主体中心处,■轴平行于水面,而以oxyz作为与船固结的坐标系,原点o位于设计航速水线上主体中心处,ox轴在纵中剖面内平行于船体基线(见图1)。
根据HYSWATH翼航状态时的外力作用情况(图1),力和力矩的平衡方程式可取如下形式:
式中:
P----- 推进力
■----- 纵倾角
RT和RH ----- 翼航状态总阻力和船体阻力
Li和Di ----- 第i个水翼的升力和阻力
■ ----- 翼航状态排水体积
xi和zi----- 水翼设置位置的轴和轴坐标(表示前水翼,表示后水翼)
xc和zc----- 翼航状态浮心的轴及轴坐标
xg和zg----- 船重心的轴及轴坐标
zp和zH----- 推进力作用点和船体阻力作用点的轴坐标
■----- 纵稳心半径
假设纵倾角很小,无因次化得如下的方程组:
其中:
S0和L0----- HYSWATH的特征面积和特征长度
CH和S----- HYSWATH船体阻力系数和其湿表面积
2、HYSWATH翼航状态吃水和纵倾角的计算
式(2)可以看成以速度为参量而吃水和纵倾角为自变量的非线性方程组,用图解法求解。
将式(2)改写为:
在翼航状态范围内选择几个速度值;V1 ,V2 ,… Vn。对一个固定的航速Vi又选择几个吃水值;zi1 ,zi2 ,… zim 。对于数据组(Vi,zij);j=1,2,...m,算出方程组(3)的左边部分■,并画出两个曲线组(见图2)。方程组的右边部分在图2上是一组直线(上图中为水平线,下图中为o■轴线)。
在上图中,求出平行线和曲线组f1(zij,■;vi) 的交点aij(j=1,2,...m)。在下图中的相应吃水曲线上求出对应于aij的交点bij(j=1,2,...m)。通过点列bij的曲线和o■轴的交点■i就是在航速Vi时的纵倾角。在确定纵倾角■i的情况下,对一个数据组(Vi,■i)应用与数据组(Vi,zij);j=1,2,...m的同样方法,求出吃水zi。对于每个速度值Vi(i=1,2,...n)反复利用以上的方法求得HYSWATH船翼航状态吃水和纵倾角(zi,■i),i=1,2,...n。然后,根据已求出来的吃水和纵倾角就可以按照小水线面双体船的方法计算HYSWATH船翼航状态总阻力。
总阻力计算与模型试验结果的比较
HYSWATH是一种全新的船型,对其各种性能的理论分析计算,尚需通过相应的模型试验来加以验证,从而揭示其内在本质,进一步修正、完善理论计算方法。HYSWATH模型试验采用Froude相似准则和斯罗哈相似准则。根据试验仪器设备的能力和各方面的条件,实船和模型的缩尺比取λ=20。表1是计算用HYSWATH的实际尺度。
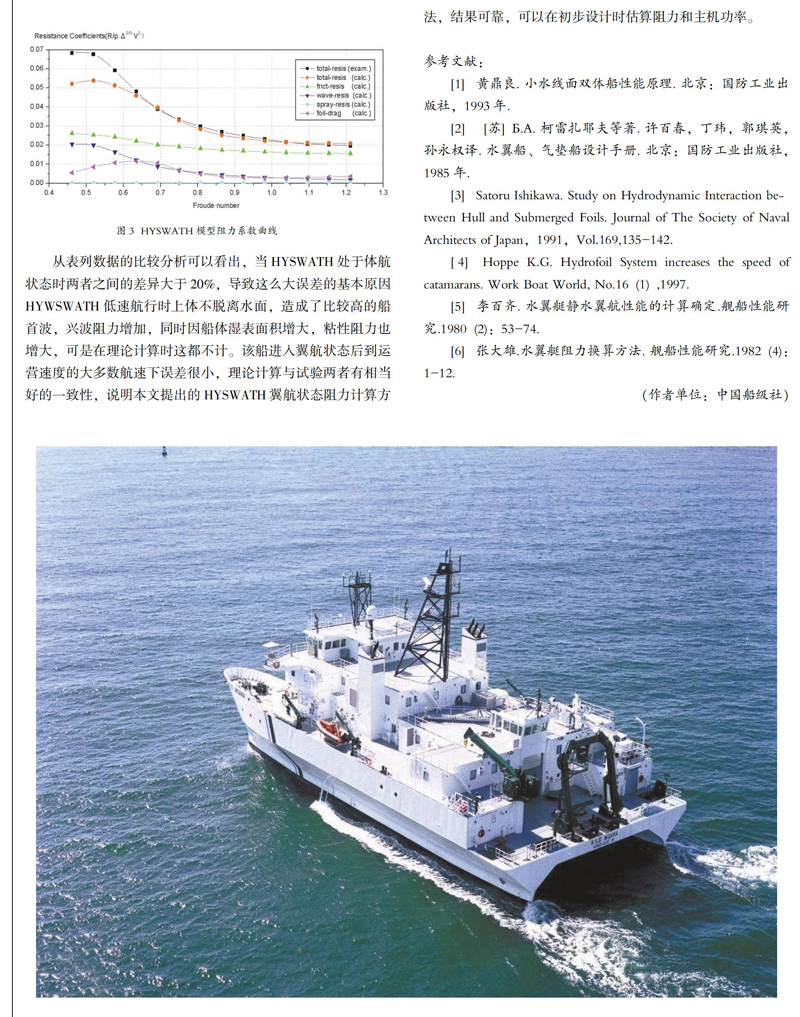
表2及图3为根据前面讨论的方法对在表1列出的HYSWATH的1:20模型理论计算求得的船体阻力及相应的模型试验结果。
表2和图3中的阻力系数是用Ri/ρΔ2/3V2来表示的,其中Ri表示各项阻力成分。
从表列数据的比较分析可以看出,当HYSWATH处于体航状态时两者之间的差异大于20%,导致这么大误差的基本原因HYWSWATH低速航行时上体不脱离水面,造成了比较高的船首波,兴波阻力增加,同时因船体湿表面积增大,粘性阻力也增大,可是在理论计算时这都不计。该船进入翼航状态后到运营速度的大多数航速下误差很小,理论计算与试验两者有相当好的一致性,说明本文提出的HYSWATH翼航状态阻力计算方法,结果可靠,可以在初步设计时估算阻力和主机功率。
参考文献:
[1] 黄鼎良. 小水线面双体船性能原理. 北京:国防工业出版社,1993年.
[2] [苏]Б.A. 柯雷扎耶夫等著. 许百春,丁玮,郭琪英,孙永权译. 水翼船、气垫船设计手册. 北京:国防工业出版社,1985年.
[3] Satoru Ishikawa. Study on Hydrodynamic Interaction between Hull and Submerged Foils. Journal of The Society of Naval Architects of Japan,1991,Vol.169,135-142.
[4] Hoppe K.G. Hydrofoil System increases the speed of catamarans. Work Boat World, No.16(1),1997.
[5] 李百齐. 水翼艇静水翼航性能的计算确定.舰船性能研究.1980(2):53-74.
[6] 张大雄.水翼艇阻力换算方法. 舰船性能研究.1982(4):1-12.
(作者单位:中国船级社)
