震后极灾区无人机最优航拍区域选择
杜浩国 张方浩 邓树荣 和仕芳 余庆坤 吕佳丽


摘要:基于蚁群优化算法,提取震后极灾区的震中距、房屋户数、人口数量、地形条件、无人机飞行时间等影响因子,提出震后极灾区无人机最优航拍区域选择方法,并将该方法应用于2016年云龙5.0级地震,实践表明该方法对极灾区开展无人机航拍,为地震后第一时间获取可靠的灾情信息提供有力的技术保障。
关键词:无人机;最优航拍区域选择;灾情获取;蚁群优化算法
中图分类号:P315.9;TP751 文献标识码:A 文章编号:1000-0666(2018)02-0209-07
0 引言
重大地震往往会造成极灾区信息通信中断和道路交通破坏,导致灾情传递受阻或应急救援盲目部署,会造成更大的损失和次生灾害。因此,如何快速获取极灾区的灾情信息成为地震应急救援工作中亟需解决的问题。近几年来迅速发展的无人机灾情获取系统(徐鹏杰,邓磊,2011;周洋等,2017)与传统人工调查方法相比,具有机动灵活、时效性好、可进行高危地区探测等特点,是震后灾情快速获取的一个有效技术支撑手段。但目前我国尚无专门用于地震灾情监控的高分辨率卫星系统,且在跨行业资源尚未完全融合情况下,快速选出地震后极灾区需航拍的重点区域是无人机应用于地震灾害中的关键问题。
破坏性地震尤其是重特大地震灾区分布范围大、破坏方向不确定、受灾程度分布不均,当前的无人机系统受燃油、电池等动力供应系统的限制,飞行时间有限。因此需要在有限时间内明确航拍的最优区域(金伟等,2009),第一时间获取可靠的灾情信息。目前,对于地震中无人机航拍区域选择(曹彦波等,2017)主要有2种方式,一是人工选择,该方法无人机飞行要求限制在飞控手视野范围内,从而导致航拍区域受限,很难获取有效的灾情信息;二是采用全部覆盖极灾区的固定航线规划(杜建福等,2008),主要采用固定的圆形路径、方形路径进行全方位航拍,导致无人机飞行的时间无法得到有效利用。
寇晓丽(2009)将蚁群优化算法引入到无人机航拍区域选取中,针对航拍点的震中距、房屋密度、人口数量、地形地势等因素,结合无人机飞行速度、续航时间等性能指标,采用蚁群优化算法,建立了一套震后极灾区无人机最优航拍区域选择分析模型;解决了人工方式选取航拍区域存在的问题,提高了航拍区域的准确性,避免了全覆盖极灾区航拍方式的盲目性。把高效的优化算法应用于震后极灾区无人机航拍最优区域选择中,能使无人机在有效的时间范围内,根据地震极灾区的分布,选取出最优的航拍区域(魏文力等,2016),高效地完成震后极灾区的航拍任务。
1 基本原理及技术路线
1.1 蚁群优化算法基本原理
蚁群优化算法是模拟蚂蚁觅食的原理,设计出的一种群集智能算法。蚂蚁在觅食过程中能够在其经过的路程上留下一种称之为信息素的物质(叶志伟,郑肇葆,2004),并在觅食过程中感知这种物质的强度,指导自己行动方向,它们总是朝着该物质强度高的方向移动,因此大量蚂蚁组成的集体觅食就表现为一种对信息素的正反馈现象(袁培燕等,2010)。同理,某一航拍区域被选中,区域上经过的蚂蚁越多,其信息素遗留也就越多,信息素的浓度也就越高,蚂蚁选择这一区域的几率也就越高,由此构成正反馈过程,从而逐渐逼近最优航拍区域。
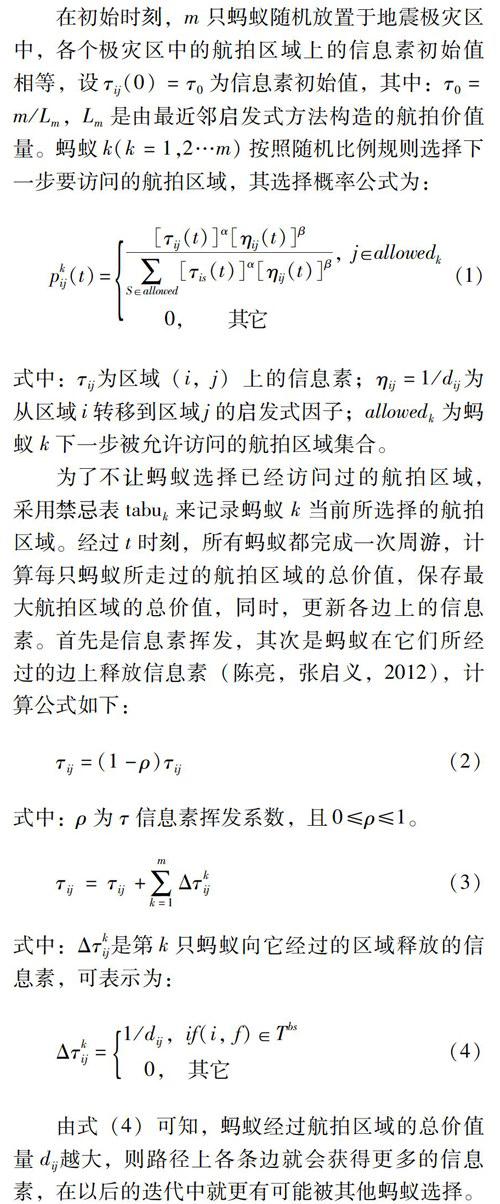
在初始时刻,m只蚂蚁随机放置于地震极灾区中,各个极灾区中的航拍区域上的信息素初始值相等,设τij(0)=τ0为信息素初始值,其中:τ0=m/Lm,Lm是由最近邻启发式方法构造的航拍价值量。蚂蚁k(k=1,2…m)按照随机比例规则选择下一步要访间的航拍区域,其选择概率公式为:式中:τij为区域(i,j)上的信息素;ηij=1/dij为从区域i转移到区域j的启发式因子;allowedk为蚂蚁k下一步被允许访问的航拍区域集合。
为了不让蚂蚁选择已经访问过的航拍区域,采用禁忌表tabuk来记录蚂蚁k当前所选择的航拍区域。经过t时刻,所有蚂蚁都完成一次周游,计算每只蚂蚁所走过的航拍区域的总价值,保存最大航拍区域的总价值,同时,更新各边上的信息素。首先是信息素挥发,其次是蚂蚁在它们所经过的边上释放信息素(陈亮,张启义,2012),计算公式如下:
τij=(1-ρ)τij(2)式中:ρ為τ信息素挥发系数,且0≤ρ≤1。式中:Δτijk是第k只蚂蚁向它经过的区域释放的信息素,可表示为:
由式(4)可知,蚂蚁经过航拍区域的总价值量dij越大,则路径上各条边就会获得更多的信息素,在以后的迭代中就更有可能被其他蚂蚁选择。
蚂蚁完成一次循环后,清空禁忌表,重新对极灾区的所有航拍区域进行选择,准备下一次周游;信息素的更新公式为(黄永青等,2006):式中:Δτijbs(t)是第k只蚂蚁向它经过的区域释放的信息素,其的定义如下:式中:Lbs为每次循环中被蚂蚁选中航拍区域的总价值量。允许更新的路径可以是全局最优解,或本次迭代的最优解。实践证明逐渐增加全局最优解的使用频率,会使该算法获得较好的性能。
1.2 技术路线
我们设计了蚁群优化算法最优航拍区域选择流程图(图1),即:提取极灾区航拍信息并进行数据化表示,再对数据进行初始化,以蚂蚁的觅食原理对航拍数据求取最优方案。当蚂蚁选择最优航拍区域时,若总航拍时间T(j)大于无人机飞行限制时间T,蚂蚁则不再选取该区域,而对于限制时间T内的航拍区域,蚂蚁每次走过都会留下信息素。在船拍总时间小于T的情况下,其所选航拍区域的总价值量L(j)>L(j-1),j区域信息素加强,(j-1)区域信息素减弱。最终使其既满足无人机航拍限制时间T,又能使其航拍价值量最大化。
2 航拍区域影响因子分析
无人机最优航拍区域选择模型中影响因子包括:(1)震中距。本文震中距指航拍区域与震中的直线距离,它直接决定该地区受灾的严重程度;(2)人口数量。人口数量也影响受灾的严重程度,地震发生在人口密集区域,即使一个很小的地震如果处置不当,也会导致巨大的损失:(3)房屋户数。房屋是人们生活的住所,一个家庭财富的聚集地,地震中房屋受损程度直接影响该区域的经济情况:(4)地形条件。地形也会影响无人机航拍效率,航拍区域的海拔、地理位置、房屋结构类型,是否处于断裂带上或滑坡体上,是直接影响无人机飞行的重要因素。综合考虑以上因素,通过专家的问卷调查和研究,确定各航拍因素的权重值。
2.1 航拍区域参数设置
无人机最优航拍区域选择需提取每个自然村的震中距(自然村距震中的直线距離)、房屋户数、人口数量与地形条件等影响因子。经过专家调查问卷,得出每个航拍因素的权重如表1所示;其中地形条件采用层次分析法,根据海拔、断裂带、地质条件等因素综合考虑,分为6个等级,如表2所示。
2.2 蚁群优化算法参数设置
蚂蚁的数量越多,可使被选择的最有价值航拍区域的信息量越来越大,其不被选择的航拍区域的信息量越来越小,从而直到其信息量消失。所以理论上,蚂蚁数量越多越好,但会增加运算的时间,降低效率。蚂蚁最优航拍区域选择:对于很多的蚂蚁,都有n个选择方式,其可选区域增多,可以克服蚂蚁搜寻的局限性,使其可搜寻的航拍区域更多。蚂蚁c++编译中随机寻找路径(陈昊,2006)的方式为随机选择为:
double choose=[(double)rand()]/(TAND_MAX)(7)
为了使电脑硬件能够快速运行,蚂蚁数量(胡小兵,2004)应限制在3000只范围内,蚂蚁的区域数量应限制在1 000个范围内;程序所预设的值为随机数,所以采用循环10次求平均值的方法,以保证结果的准确性。
3 最优航拍区域选择方法及模拟分析
蚁群优化算法(杨剑峰,2007)主要根据具有航拍价值量大和耗时量最小的性能指标,将改进的蚁群优化算法应用于无人机航拍区域选择设计中。本文基于蚁群优化算法提出了一种新型启发式最优无人机航拍区域选择方法,该方法以极灾区中每个自然村为1个航拍区域,提取每个自然村的震中距d(i)、房屋户数a(i)、人口数量b(i)、地形条件c(i)与无人机到达该地区的飞行时间t(i)等,根据这些影响因子,计算出该地区无人机航拍的价值量v(i),从而得到无人机在有限时间内航拍的价值总量L(j)。
无人机到达该自然村的往返(2倍路程:考虑到无人机航拍后要以同样的路程返回)飞行时间为:式中:v为无人机航拍飞行速度,且v=20m/s。
被选中航拍区域所需要的总飞行时间为:
T=∑t(i)(0≤i≤n)(0≤T≤16min)(9)式中,无人机的最大飞行总时间限制为T≤16min。
单个航拍区域的航拍价值量v(i)为:式中:d(i)为震中距;a(i)为房屋户数;b(i)为人口数量;c(i)为地形条件;i为被选中航拍的区域;n为航拍区域(自然村)个数。其中d(i),c(i)与该区域的航拍价值量v(i)成反比;a(i),b(i)与v(i)成正比。
被选中航拍区域i的总价值量为:(0≤i≤n)(11)
比较每条航线价值量L(3)的大小,从而在有限的飞行时间内,得出最大航拍价值量L(j),即选出的区域为最优的航拍区域。
为检验最优航拍区域选择方法的有效性,我们模拟了发生X级地震后,对极灾区进行无人机航拍。对极灾区的无人机航拍数据进行收集,模拟2个相邻航拍区域之间的距离为1km,共有9个航拍区(图2),每个航拍区域的震中距、房屋户数、人口数量及地形条件c(i)见表3。
通过最优航拍区域选择方法,可计算得出航拍区域(自然村)4、5、6被选中,通过式(8)~(10)计算可得v(4)=25.6097,v(5)=45,v(6)=40,航拍所需要的总飞行时间为T=t(4)+t(5)+t(6)=15min≤16min,航拍的实际路径为D=2×d(4)+2×d(5)+2×d(6)=18km≤19.2km,满足无人机飞行最大时间和最大飞行路程要求,其航拍的总价值量为L(j)=v(4)+v(5)+v(6)=110.6。因此,无人机4、5、6航拍区域为最优航拍区域(图2)。
4 应用分析
4.1 震区基本情况
2016年5月21日云南省大理州云龙县发生5.0级地震,宏观震中位于云龙县多依树村一带,大理州洱源县部分乡镇遭受不同程度破坏。此次地震余震频繁,加之受震后降雨的影响,出现了滑坡、崩塌等次生地质灾害。214国道云龙县至震中多依树村一带落石,路基、路面严重损毁。通往大麦地村、长新乡(镇)、白石乡(镇)等40多条通村公路多处塌方,因受余震影响,通往震中多依树村公路多次交通中断,长新、白石等乡镇的乡村公路和桥梁也受到不同程度的破坏。云龙县境内山高坡陡,高山河谷落差较大,通往地震灾区的唯一生命线告急,此时,若能有无人机在灾情获取和道路侦察方面提供技术支持,将对应急救援提供很好的帮助。
4.2 震中航拍信息提取
此次航拍所采用的无人机为大疆悟inspire 2。由于村镇人口密集,因此以云龙5.0级地震极灾区多依树村、长新乡、白石镇等30个自然村为单位开展无人机航拍。根据2016年云龙县5.0级地震灾害信息调查,得到每个航拍区房屋户数、人口数量、地形条件,如表4所示;再计算出各自然村的震中距及无人机到达指定地点的飞行时间;最后采用最优航拍区域选择方法得到被选中的航拍区域(表4中I表示选中,0表示未被选中)。
4.3 最优化运行结果
图3为震后极灾区无人机最优航拍区域选择结果,其中被选中舫拍总价值量为760。由图3可以看出,航拍区域的优选很大程度上由震中距决定,因为震中距在影响航拍区域选取的因素达到总影响因素的40%;而对于中和上村,震中距较远,但该区域的房屋户数和人口数量相对较多,轻微的震感也会导致很大的经济损失。所以中和上村也被选中为最优航拍区域。由于此次航拍备有5块无人机电池,总航拍时间为80min,因此在有限的飞行时间内,能最快、最有效、第一时间获取地震灾情。
据实地调查,震中多依树及其附近的后曲、红栗坡、石城等区域房屋多为土木结构,且建造于不稳定的滑坡上,相对于未被选中航拍区域有明显的裂缝和损坏。图4为无人机对重点航拍区域多依树、后曲、红栗坡、石城的航拍影像图。
5 结论
在地震应急指挥中,無人机最优航拍区域选择方法能使无人机在地震发生的第一时间,根据每个航拍区域的震中距、房屋户数、人口数量、地形条件以及无人机到达指定地点的飞行时间等影响因子,迅速在极灾中选出最优航拍区域,有效利用无人机的飞行时间,避免了人为选取的不足。下一步的重点研究方向是获取无人机影像后的快速智能处理方法,以期能达到地震灾害发生后准实时响应。
参考文献:
曹彦波,吴艳梅,许瑞杰,等.2017.基于微博舆情数据的震后有感范围提取研究[J].地震研究,40(2):303-310.
陈昊.2006.蚁群优化算法的原理及其应用[J].湖北大学学报(自然科学版),28(4):350-352.
陈亮,张启义.2012.基于动态蒸发因子的蚁群算法[J].军事交通学院学报,14(9):88-91.
杜建福.2008.基于预测控制的小型无人直升机自主飞行研究[D].上海:上海交通大学.
胡小兵.2004.蚁群优化原理、理论及其应用研究[D].重庆:重庆大学.
黄永青,梁吕勇,张祥德.2006.基于均匀设计的蚁群算法参数设定[J].控制与决策,21(1):93-96.
金伟,葛宏立,杜华强,等.2009.无人机遥感发展与应用概况[J].遥感信息,(1):88-92.
寇晓丽.2009.群智能算法及其应用研究[D].西安:西安电子科技大学.
魏义力,丁建,黄建峰.2016.固定翼无人机电力巡线航线规划浅析[J].中国电业(技术版),(4):74-76.
徐鹏杰,邓磊.2011.遥感技术在减灾救灾巾的应用[J].遥感技术与应用,26(4):512-519.
杨剑峰.2007.蚁群算法及其应用研究[D].杭州:浙江大学
叶志伟,郑肇葆.2004.蚁群算法中参数α、β、β设置的研究——以TSP问题为例[J].武汉大学学报(信息科学版),29(7):597-601.
袁培燕,刘萍,高宏卿.2010.蚁群算法迭代次数的一种优化策略[J].河南师范大学学报(自然版),38(4):48-50.
周洋,明小娜,杨艳珠,等.灾评新技术在云龙5.0级地震烈度调查中的应用[J].地震研究,40(1):161-166.
摘要:基于蚁群优化算法,提取震后极灾区的震中距、房屋户数、人口数量、地形条件、无人机飞行时间等影响因子,提出震后极灾区无人机最优航拍区域选择方法,并将该方法应用于2016年云龙5.0级地震,实践表明该方法对极灾区开展无人机航拍,为地震后第一时间获取可靠的灾情信息提供有力的技术保障。
关键词:无人机;最优航拍区域选择;灾情获取;蚁群优化算法
中图分类号:P315.9;TP751 文献标识码:A 文章编号:1000-0666(2018)02-0209-07
0 引言
重大地震往往会造成极灾区信息通信中断和道路交通破坏,导致灾情传递受阻或应急救援盲目部署,会造成更大的损失和次生灾害。因此,如何快速获取极灾区的灾情信息成为地震应急救援工作中亟需解决的问题。近几年来迅速发展的无人机灾情获取系统(徐鹏杰,邓磊,2011;周洋等,2017)与传统人工调查方法相比,具有机动灵活、时效性好、可进行高危地区探测等特点,是震后灾情快速获取的一个有效技术支撑手段。但目前我国尚无专门用于地震灾情监控的高分辨率卫星系统,且在跨行业资源尚未完全融合情况下,快速选出地震后极灾区需航拍的重点区域是无人机应用于地震灾害中的关键问题。
破坏性地震尤其是重特大地震灾区分布范围大、破坏方向不确定、受灾程度分布不均,当前的无人机系统受燃油、电池等动力供应系统的限制,飞行时间有限。因此需要在有限时间内明确航拍的最优区域(金伟等,2009),第一时间获取可靠的灾情信息。目前,对于地震中无人机航拍区域选择(曹彦波等,2017)主要有2种方式,一是人工选择,该方法无人机飞行要求限制在飞控手视野范围内,从而导致航拍区域受限,很难获取有效的灾情信息;二是采用全部覆盖极灾区的固定航线规划(杜建福等,2008),主要采用固定的圆形路径、方形路径进行全方位航拍,导致无人机飞行的时间无法得到有效利用。
寇晓丽(2009)将蚁群优化算法引入到无人机航拍区域选取中,针对航拍点的震中距、房屋密度、人口数量、地形地势等因素,结合无人机飞行速度、续航时间等性能指标,采用蚁群优化算法,建立了一套震后极灾区无人机最优航拍区域选择分析模型;解决了人工方式选取航拍区域存在的问题,提高了航拍区域的准确性,避免了全覆盖极灾区航拍方式的盲目性。把高效的优化算法应用于震后极灾区无人机航拍最优区域选择中,能使无人机在有效的时间范围内,根据地震极灾区的分布,选取出最优的航拍区域(魏文力等,2016),高效地完成震后极灾区的航拍任务。
1 基本原理及技术路线
1.1 蚁群优化算法基本原理
蚁群优化算法是模拟蚂蚁觅食的原理,设计出的一种群集智能算法。蚂蚁在觅食过程中能够在其经过的路程上留下一种称之为信息素的物质(叶志伟,郑肇葆,2004),并在觅食过程中感知这种物质的强度,指导自己行动方向,它们总是朝着该物质强度高的方向移动,因此大量蚂蚁组成的集体觅食就表现为一种对信息素的正反馈现象(袁培燕等,2010)。同理,某一航拍区域被选中,区域上经过的蚂蚁越多,其信息素遗留也就越多,信息素的浓度也就越高,蚂蚁选择这一区域的几率也就越高,由此构成正反馈过程,从而逐渐逼近最优航拍区域。
在初始时刻,m只蚂蚁随机放置于地震极灾区中,各个极灾区中的航拍区域上的信息素初始值相等,设τij(0)=τ0为信息素初始值,其中:τ0=m/Lm,Lm是由最近邻启发式方法构造的航拍价值量。蚂蚁k(k=1,2…m)按照随机比例规则选择下一步要访间的航拍区域,其选择概率公式为:式中:τij为区域(i,j)上的信息素;ηij=1/dij为从区域i转移到区域j的启发式因子;allowedk为蚂蚁k下一步被允许访问的航拍区域集合。
为了不让蚂蚁选择已经访问过的航拍区域,采用禁忌表tabuk来记录蚂蚁k当前所选择的航拍区域。经过t时刻,所有蚂蚁都完成一次周游,计算每只蚂蚁所走过的航拍区域的总价值,保存最大航拍区域的总价值,同时,更新各边上的信息素。首先是信息素挥发,其次是蚂蚁在它们所经过的边上释放信息素(陈亮,张启义,2012),计算公式如下:
τij=(1-ρ)τij(2)式中:ρ為τ信息素挥发系数,且0≤ρ≤1。式中:Δτijk是第k只蚂蚁向它经过的区域释放的信息素,可表示为:
由式(4)可知,蚂蚁经过航拍区域的总价值量dij越大,则路径上各条边就会获得更多的信息素,在以后的迭代中就更有可能被其他蚂蚁选择。
蚂蚁完成一次循环后,清空禁忌表,重新对极灾区的所有航拍区域进行选择,准备下一次周游;信息素的更新公式为(黄永青等,2006):式中:Δτijbs(t)是第k只蚂蚁向它经过的区域释放的信息素,其的定义如下:式中:Lbs为每次循环中被蚂蚁选中航拍区域的总价值量。允许更新的路径可以是全局最优解,或本次迭代的最优解。实践证明逐渐增加全局最优解的使用频率,会使该算法获得较好的性能。
1.2 技术路线
我们设计了蚁群优化算法最优航拍区域选择流程图(图1),即:提取极灾区航拍信息并进行数据化表示,再对数据进行初始化,以蚂蚁的觅食原理对航拍数据求取最优方案。当蚂蚁选择最优航拍区域时,若总航拍时间T(j)大于无人机飞行限制时间T,蚂蚁则不再选取该区域,而对于限制时间T内的航拍区域,蚂蚁每次走过都会留下信息素。在船拍总时间小于T的情况下,其所选航拍区域的总价值量L(j)>L(j-1),j区域信息素加强,(j-1)区域信息素减弱。最终使其既满足无人机航拍限制时间T,又能使其航拍价值量最大化。
2 航拍区域影响因子分析
无人机最优航拍区域选择模型中影响因子包括:(1)震中距。本文震中距指航拍区域与震中的直线距离,它直接决定该地区受灾的严重程度;(2)人口数量。人口数量也影响受灾的严重程度,地震发生在人口密集区域,即使一个很小的地震如果处置不当,也会导致巨大的损失:(3)房屋户数。房屋是人们生活的住所,一个家庭财富的聚集地,地震中房屋受损程度直接影响该区域的经济情况:(4)地形条件。地形也会影响无人机航拍效率,航拍区域的海拔、地理位置、房屋结构类型,是否处于断裂带上或滑坡体上,是直接影响无人机飞行的重要因素。综合考虑以上因素,通过专家的问卷调查和研究,确定各航拍因素的权重值。
2.1 航拍区域参数设置
无人机最优航拍区域选择需提取每个自然村的震中距(自然村距震中的直线距離)、房屋户数、人口数量与地形条件等影响因子。经过专家调查问卷,得出每个航拍因素的权重如表1所示;其中地形条件采用层次分析法,根据海拔、断裂带、地质条件等因素综合考虑,分为6个等级,如表2所示。
2.2 蚁群优化算法参数设置
蚂蚁的数量越多,可使被选择的最有价值航拍区域的信息量越来越大,其不被选择的航拍区域的信息量越来越小,从而直到其信息量消失。所以理论上,蚂蚁数量越多越好,但会增加运算的时间,降低效率。蚂蚁最优航拍区域选择:对于很多的蚂蚁,都有n个选择方式,其可选区域增多,可以克服蚂蚁搜寻的局限性,使其可搜寻的航拍区域更多。蚂蚁c++编译中随机寻找路径(陈昊,2006)的方式为随机选择为:
double choose=[(double)rand()]/(TAND_MAX)(7)
为了使电脑硬件能够快速运行,蚂蚁数量(胡小兵,2004)应限制在3000只范围内,蚂蚁的区域数量应限制在1 000个范围内;程序所预设的值为随机数,所以采用循环10次求平均值的方法,以保证结果的准确性。
3 最优航拍区域选择方法及模拟分析
蚁群优化算法(杨剑峰,2007)主要根据具有航拍价值量大和耗时量最小的性能指标,将改进的蚁群优化算法应用于无人机航拍区域选择设计中。本文基于蚁群优化算法提出了一种新型启发式最优无人机航拍区域选择方法,该方法以极灾区中每个自然村为1个航拍区域,提取每个自然村的震中距d(i)、房屋户数a(i)、人口数量b(i)、地形条件c(i)与无人机到达该地区的飞行时间t(i)等,根据这些影响因子,计算出该地区无人机航拍的价值量v(i),从而得到无人机在有限时间内航拍的价值总量L(j)。
无人机到达该自然村的往返(2倍路程:考虑到无人机航拍后要以同样的路程返回)飞行时间为:式中:v为无人机航拍飞行速度,且v=20m/s。
被选中航拍区域所需要的总飞行时间为:
T=∑t(i)(0≤i≤n)(0≤T≤16min)(9)式中,无人机的最大飞行总时间限制为T≤16min。
单个航拍区域的航拍价值量v(i)为:式中:d(i)为震中距;a(i)为房屋户数;b(i)为人口数量;c(i)为地形条件;i为被选中航拍的区域;n为航拍区域(自然村)个数。其中d(i),c(i)与该区域的航拍价值量v(i)成反比;a(i),b(i)与v(i)成正比。
被选中航拍区域i的总价值量为:(0≤i≤n)(11)
比较每条航线价值量L(3)的大小,从而在有限的飞行时间内,得出最大航拍价值量L(j),即选出的区域为最优的航拍区域。
为检验最优航拍区域选择方法的有效性,我们模拟了发生X级地震后,对极灾区进行无人机航拍。对极灾区的无人机航拍数据进行收集,模拟2个相邻航拍区域之间的距离为1km,共有9个航拍区(图2),每个航拍区域的震中距、房屋户数、人口数量及地形条件c(i)见表3。
通过最优航拍区域选择方法,可计算得出航拍区域(自然村)4、5、6被选中,通过式(8)~(10)计算可得v(4)=25.6097,v(5)=45,v(6)=40,航拍所需要的总飞行时间为T=t(4)+t(5)+t(6)=15min≤16min,航拍的实际路径为D=2×d(4)+2×d(5)+2×d(6)=18km≤19.2km,满足无人机飞行最大时间和最大飞行路程要求,其航拍的总价值量为L(j)=v(4)+v(5)+v(6)=110.6。因此,无人机4、5、6航拍区域为最优航拍区域(图2)。
4 应用分析
4.1 震区基本情况
2016年5月21日云南省大理州云龙县发生5.0级地震,宏观震中位于云龙县多依树村一带,大理州洱源县部分乡镇遭受不同程度破坏。此次地震余震频繁,加之受震后降雨的影响,出现了滑坡、崩塌等次生地质灾害。214国道云龙县至震中多依树村一带落石,路基、路面严重损毁。通往大麦地村、长新乡(镇)、白石乡(镇)等40多条通村公路多处塌方,因受余震影响,通往震中多依树村公路多次交通中断,长新、白石等乡镇的乡村公路和桥梁也受到不同程度的破坏。云龙县境内山高坡陡,高山河谷落差较大,通往地震灾区的唯一生命线告急,此时,若能有无人机在灾情获取和道路侦察方面提供技术支持,将对应急救援提供很好的帮助。
4.2 震中航拍信息提取
此次航拍所采用的无人机为大疆悟inspire 2。由于村镇人口密集,因此以云龙5.0级地震极灾区多依树村、长新乡、白石镇等30个自然村为单位开展无人机航拍。根据2016年云龙县5.0级地震灾害信息调查,得到每个航拍区房屋户数、人口数量、地形条件,如表4所示;再计算出各自然村的震中距及无人机到达指定地点的飞行时间;最后采用最优航拍区域选择方法得到被选中的航拍区域(表4中I表示选中,0表示未被选中)。
4.3 最优化运行结果
图3为震后极灾区无人机最优航拍区域选择结果,其中被选中舫拍总价值量为760。由图3可以看出,航拍区域的优选很大程度上由震中距决定,因为震中距在影响航拍区域选取的因素达到总影响因素的40%;而对于中和上村,震中距较远,但该区域的房屋户数和人口数量相对较多,轻微的震感也会导致很大的经济损失。所以中和上村也被选中为最优航拍区域。由于此次航拍备有5块无人机电池,总航拍时间为80min,因此在有限的飞行时间内,能最快、最有效、第一时间获取地震灾情。
据实地调查,震中多依树及其附近的后曲、红栗坡、石城等区域房屋多为土木结构,且建造于不稳定的滑坡上,相对于未被选中航拍区域有明显的裂缝和损坏。图4为无人机对重点航拍区域多依树、后曲、红栗坡、石城的航拍影像图。
5 结论
在地震应急指挥中,無人机最优航拍区域选择方法能使无人机在地震发生的第一时间,根据每个航拍区域的震中距、房屋户数、人口数量、地形条件以及无人机到达指定地点的飞行时间等影响因子,迅速在极灾中选出最优航拍区域,有效利用无人机的飞行时间,避免了人为选取的不足。下一步的重点研究方向是获取无人机影像后的快速智能处理方法,以期能达到地震灾害发生后准实时响应。
参考文献:
曹彦波,吴艳梅,许瑞杰,等.2017.基于微博舆情数据的震后有感范围提取研究[J].地震研究,40(2):303-310.
陈昊.2006.蚁群优化算法的原理及其应用[J].湖北大学学报(自然科学版),28(4):350-352.
陈亮,张启义.2012.基于动态蒸发因子的蚁群算法[J].军事交通学院学报,14(9):88-91.
杜建福.2008.基于预测控制的小型无人直升机自主飞行研究[D].上海:上海交通大学.
胡小兵.2004.蚁群优化原理、理论及其应用研究[D].重庆:重庆大学.
黄永青,梁吕勇,张祥德.2006.基于均匀设计的蚁群算法参数设定[J].控制与决策,21(1):93-96.
金伟,葛宏立,杜华强,等.2009.无人机遥感发展与应用概况[J].遥感信息,(1):88-92.
寇晓丽.2009.群智能算法及其应用研究[D].西安:西安电子科技大学.
魏义力,丁建,黄建峰.2016.固定翼无人机电力巡线航线规划浅析[J].中国电业(技术版),(4):74-76.
徐鹏杰,邓磊.2011.遥感技术在减灾救灾巾的应用[J].遥感技术与应用,26(4):512-519.
杨剑峰.2007.蚁群算法及其应用研究[D].杭州:浙江大学
叶志伟,郑肇葆.2004.蚁群算法中参数α、β、β设置的研究——以TSP问题为例[J].武汉大学学报(信息科学版),29(7):597-601.
袁培燕,刘萍,高宏卿.2010.蚁群算法迭代次数的一种优化策略[J].河南师范大学学报(自然版),38(4):48-50.
周洋,明小娜,杨艳珠,等.灾评新技术在云龙5.0级地震烈度调查中的应用[J].地震研究,40(1):161-166.
