宫德健 章成 刘鹏 邓晓盟 贺雨楠


摘 要:水下环境往往比较复杂,因此水下救援机器人需要具有良好的功能结构,以便执行和完成水下救援任务。本文以生物仿生技术为依托,以海蛇为建模原型,做该产品的整体性规划。首先,水下救援机器人不会对遇险人员造成二次伤害,其体形细长,能通过一些狭窄通道,不易被水下环境限制,并且自身重量较轻,动力较足,移动速度快,其能快速到达救援现场,节省宝贵的救援时间;其次,其可以结合红外摄像、超声波定位、温度传感器等技术,完成对水下人员的搜救任务;最后,其通过水下探测功能对被施救者进行搜寻定位,然后上传定位信息进行分析模拟,根据被搜救者形态来改变自身结构,将自身固定在被救援者身体周围,并打开快速充气气囊,将溺水者带至水面,完成救援任务。
关键词:红外摄像;超声波定位;温度传感器;分析模拟
中图分类号:TP242文献标识码:A文章编号:1003-5168(2020)35-0053-03
Abstract: The underwater environment is often complex, so underwater rescue robots need to have a good functional structure, in order to perform and complete underwater rescue tasks. Relying on biomimetic technology, this paper used the sea snake as a modeling prototype to make the overall plan for the product. First of all, underwater rescue robots will not cause secondary damage to persons in distress, its body is slender, it can pass through some narrow passages, and is not easily restricted by the underwater environment, and has a lighter weight, sufficient power, and fast moving speed, which can quickly reach the rescue site, saving valuable rescue time; secondly, it can combine infrared camera, ultrasonic positioning, temperature sensor and other technologies to complete the search and rescue mission of underwater personnel; finally, it uses the underwater detection function to search and locate the rescued, and then uploads the positioning information for analysis and simulation, changes its structure according to the shape of the rescued, fixes itself around the rescued body, and opens the fast inflatable airbag, brings the drowning person to the surface to complete the rescue mission.
Keywords: infrared camera;ultrasonic positioning;temperature sensor;analysis and simulation
隨着通信技术、新材料、人工智能、大数据等新技术与传统产业的深度融合,应急产业在新技术、新产品、新业态和新模式等方面必将迎来前所未有的发展机遇。以机器人为代表的智能救援产品研发进展顺利,逐渐崭露头角,前景可期。以人员溺水为例,随着经济发展和气候变化,救援工作展开的严重性、多样性和复杂度也逐渐增加。溺水发生后的黄金抢救时间内,受现场非结构化环境的影响,救援人员有时难以快速、高效、安全地进行工作,或者救援任务超出救援人员的能力范围,因此,救援机器人已经成为一种重要的救援必需品[1]。
1 形态传动装置设计与驱动装置
对于形态传动装置,整个机器人采用舵机驱动的方式,通过舵机控制各关节进行蛇形蜿蜒运动,通过控制舵机不同的转动角度,实现机器人整体的形态改变,并通过加装可调向螺旋桨进行动力补给,进一步提升机器人的运动速度,达到快速救援的目的[2]。机器人通过舵机的运行完成前进、转向等动作。通过舵机的旋转,关节处的舵机连接结构上下、左右运行,实现机器人的上浮、下潜、左右旋转运动。同时,每一关节均为两连接部分与另一结构进行卡扣方式连接,便于进行电池、芯片等的安装、拆卸与维修,也可使布线更加简洁方便。
研发团队也对蛇蜿蜒运动的轨迹曲线进行研究分析,设计蜿蜒运动控制函数,实现蛇形机器人的蜿蜒前行以及缠绕功能。不仅如此,由于不同环境下该产品的运动介质、所受阻力、液体对该产品力学结构的影响都不相同,团队针对这些方面进行了更加细致的优化,使得机器人的运动更加自然,也能最大限度地减小机器人的运行功耗。驱动装置运行本体包括依次首尾相连的若干身段,第一个身段为半球形和圆柱形的组合结构,其他身段为圆柱形结构,任意相邻的两个身段之间设有连接机构。至少三个身段设有驱动机构,第一个身段设有用于观察水下环境的第一红外摄像头和红外线传感装置。本实用新型能够对被救援者进行准确定位,并且利用自身变形对被救援者进行捆绑,从而将被救援者带上水面。水下推进器控制原理如下:信号线与主控板直接相连,由电池供电,主控板产生PWM信号来控制螺旋桨的转速,目前有10级转速可调。对于舵机相关程序控制,采用控制电板进行指令发出,控制电路接收信号源的控制信号,驱动电机转动,控制舵机转动到目标角度或保持在目标角度,并通过水下电机带动螺旋桨旋转并产生推力,从而使水下机器人完成下潜、上浮、旋转和侧移等各种动作。
2 气囊发生装置设计
气囊发生装置由二氧化碳压缩瓶(见图1)和橡胶气囊组成(见图2)。对于气囊发生装置,采用二氧化碳压缩瓶提供压缩气体,为气囊供气,压缩瓶中的二氧化碳以液态形式存在,通过气阀打开施压的方式,快速产生气体并充满气囊,使之通过增大体积产生浮力。机器人气囊选择橡胶气囊。通过在柔性的橡胶胶囊中充入压缩空气,利用空气的可压缩性和水的流动性来实现弹性作用。
橡胶气囊是利用橡胶的高分子特性和高强度纤维布,硫化而成的一种可膨胀、收缩的不同形状的内模,因此性能好,可以多次在水下重复使用。橡胶气囊的设计科学合理,并且橡胶气囊操作简单,省工、省时、省料。橡胶气囊具有良好的耐老化性能,采用合成橡胶、天然橡胶与纤维加强层硫化后制成。其既有良好的抗胀强度,又有弹性、柔韧性,橡胶气囊能满足各种工作条件下的使用需求。但是,存放气囊的地方应远离热源,以免损坏气囊本身。气囊不能与酸、碱、油以及有机溶剂接触。
3 信息交互系统设计
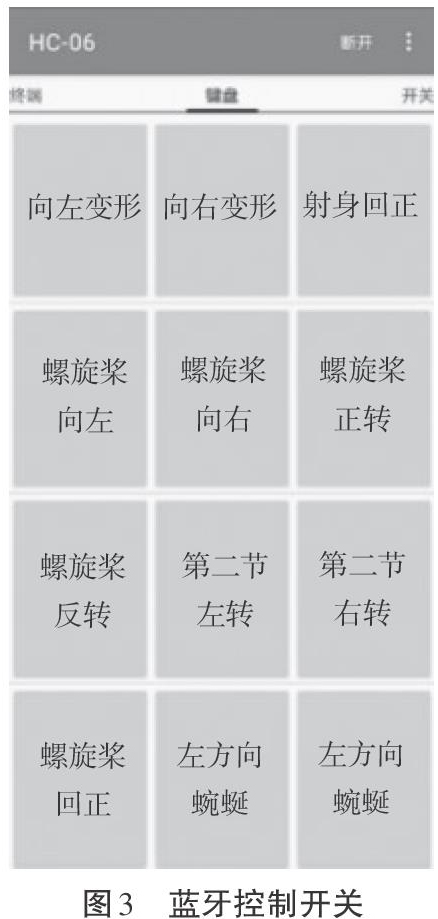
3.1 HC-06蓝牙模块
通过串口通信与主控板进行信息交换,可使用任意具有蓝牙功能的设备如手机、计算机与该蓝牙模块连接,然后按照拟定的通信协议输入信息,便可实现一系列功能,达到远程操控的目的。蓝牙控制开关如图3所示。
3.2 US-100超声波测距模块
本机器人将使用4个超声波测距模块对机器人的周边环境进行实时监测,而且能检测当前环境温度,以确保机器人能工作在一个安全的环境内,通过电平触发的方式来实现。其工作原理为:只需要在Trig/TX管脚输入一个10 μS以上的高电平,系统便可发出8个40 kHz的超声波脉冲,然后检测回波信号。当检测到回波信号后,模块还要进行温度值的测量,然后根据当前温度对测距结果进行校正,将校正后的结果和当前环境温度通过Echo/RX管脚输出。第一节超声波模块(前方向)如图4所示。
3.3 OV7670摄像头模块
OV7670摄像头模块能将机器人前方的图像记录下来,通过蓝牙模块传到手机或计算机上,使操控者知道当前环境和搜救人员位置,方便救援。
使用红外摄像头将画面传输到操作者的计算机或者手机上,操作者也能在这些设备上操控机器人移动至遇险人员周围,之后可控制机器人改变其形态,环绕固定遇险人员,并打开快速充气气囊,形成一个救生圈,将遇险人员带至水面,操作者可以控制此时的机器人移动至陆面或者最近的船只上,完成一整套救援流程。
4 其他部分装置设计
4.1 机器人连接设计
为保证舵机的安全使用及拆卸,将舵机安装于一装置内,并通过另外两部分结构与该装置的连接,完成机器人关节处的连接。这两部分结构一方面分别与舵机安装装置的上下、左右面通过卡扣方式连接,便于进行结构分离及各部分的维修;另一方面分别伸入两关节内一定距离,以满足结构的力学性能要求以及舵机的转矩要求等,并通过卡扣方式进行连接。
4.2 机器人芯片固定设计
为固定芯片,本研究设计了芯片安装装置,并利用拔插连接方式将其固定在机器人内表面,便于进行芯片的安装及拆卸。该装置分为两部分,上面部分为外方内圆结构,上表面距机器人内表面10 cm,可以更好地保证芯片的散热;下面部分为中空结构,与机器人内表面的凸起连接,起到了固定的作用。这样可以使布线更加合理,机器人内部空间得到充分利用。设定舵机转向角为60°,根据结构形式,采取舵机正反方向交替控制设计。当机器人处于救援形态时,机器人会驱动舵机进行蛇身环绕运动,同时第二节会进行左右方向90°旋轉,推进器进行左右方向90°旋转,快速充气气囊启动,实施救援任务。
5 结论
近年来,随着前沿科技的综合发展与市场需求的全面升级,机器人产业正加速崛起,在特种救援领域也得到了深入应用。救援机器人的种类日益丰富,功能也愈发多元化,其成为救援装备中的新生力量,在救援行动中发挥日趋重要的作用。在水下救援过程中,水下救援机器人可以减少人员伤亡和财产损失。本研究积极响应国家政策,研发新型水下救援机器人,推动了国内机器人行业的发展。
参考文献:
[1]卢震宇.基于STM32的无人无缆水下救援机器人[J].电子技术与软件工程,2019(5):99.
[2]孙文芳.基于前混合磨料射流的水下破拆救援机器人的研究[J].科技视界,2019(10):77-78.
- 保花保果剂对番茄果实生长发育的影响
- 菇渣复合基质对西瓜嫁接幼苗生长和早期产量的影响
- 大棚菇娘育苗技术
- 松花菜周年高效栽培技术
- 大棚西芹多层覆盖长季节栽培技术
- 早春樱桃番茄‘凤珠’在丹东地区的高产优质栽培技术
- 北京地区早春日光温室小果型南瓜高产栽培技术
- 秋季哈密瓜露地滴灌栽培技术
- 江汉平原高品质厚皮甜瓜大棚栽培技术
- 河南新乡小拱棚西瓜嫁接高产栽培技术
- 淮北大棚西瓜1年多茬高效栽培技术
- 薄皮甜瓜新品种‘春甜1号’的选育
- ‘华蜜1001’甜瓜的选育
- “高番茄红素、瓜氨酸、维生素C含量西瓜品种选育与应用”荣获2015年河南省科技进步二等奖
- 山东省西瓜甜瓜生产现状及发展对策
- 国家西甜瓜产业技术体系育种功能研究室无籽西瓜育种岗位科学家——刘文革等
- 国家西甜瓜产业技术体系育种功能研究室甜瓜育种岗位科学家——伊鸿平等
- 抑制消减杂交技术在瓜菜作物研究中的应用
- 植物类胡萝卜素研究进展
- 近10年国内泡菜研究进展
- 生产面包专用小麦粉过程的质量控制
- 基于Caco—2细胞模型评价食品营养物质的研究进展
- 多种因素影响下的超高压提取工艺改良及应用研究
- 乳酸菌发酵提高果蔬抗氧化性的研究进展
- 最好吃的红薯——花园口红薯
- be too close to call
- be too much for sb
- be torn between a and b
- be to sb's advantage
- be to sb's/sth's disadvantage
- be to your liking
- betray
- betrayal
- betrayals
- betrayed
- betrayer
- betrayers
- betraying
- betrayment
- betrays
- be tricked/deceived
- be tried
- be true
- be true to
- bet's
- bets
- betted
- better
- better days
- bettered
- 窈娆
- 窈娘
- 窈娜
- 窈寞
- 窈峭
- 窈峭刻山
- 窈悠
- 窈昧
- 窈杳
- 窈深
- 窈渺
- 窈然
- 窈眇
- 窈窅
- 窈窈
- 窈窈冥冥
- 窈窕
- 窈窕之章
- 窈窕冥冥
- 窈窕娘
- 窈窕淑女
- 窈窕淑女,君子好逑
- 窈窕淑媚
- 窈纠
- 窈绕