周琪
摘 要:铁路编组站已逐步走向全面自動化,但是驼峰车辆溜放依旧保持着人工摘钩的传统作业方式,较大影响了编组站的作业效率和技术水平。通过对货车车辆在编组站驼峰溜放作业时的工况以及受力进行分析,建立车组解编时驼峰提钩点位置数学计算模型,推算驼峰提钩的有效位置,利用图像识别、雷达测速、工业机器人等技术手段,研究获取驼峰主体信号、勾计划、目标定位、速度测控等信息的方法以及机器人的作业模式和系统能耗,分析研制过程中的关键技术,进而确定采用行走式机器人来实现编组站驼峰摘钩作业自动化的可行性。
关键词:驼峰;自动提钩;编组站;机器人
中图分类号:U284.66文献标识码:A文章编号:1003-5168(2021)01-0113-04
Abstract: At present, the railway marshalling station has gradually moved towards full automation, but the traditional operation method of manual unhooking of hump vehicles is still maintained, which greatly affects the operation efficiency and technical level of the marshalling station. This paper analyzed the working conditions and forces of truck vehicles through hump slip operation in marshalling station, established the mathematical calculation model of hump lift point position, calculated the effective position of hump lift hook, studied the methods of obtaining information of hump main signal, hook plan, target location and speed measurement and control ,as well as the robot's operation mode and system energy consumption by means of image recognition, radar speed measurement and industrial robot, analyzed the technical difficulties in the process of development, and then determined the feasibility of using walking robot to realize the automation of hump hook picking in marshalling station.
Keywords: hump;automatic hook lifting;marshalling station;robot
1 研究背景
随着我国铁路的高速发展,编组站的自动化程度不断提升,列车推峰和溜放都已经实现了自动化。但是,在驼峰分解列车时依旧采用传统的人工摘钩模式,作业人员工作环境差、劳动强度大、安全风险高,同时还存在因调车作业单污损后错提和漏提的情况,极大地影响了编组站的作业效率,与国家实施“公转铁”后铁路运量的急速增长极不适应,是现代化编组站急需解决的关键问题。近年来,编组站综合集成自动化系统(Computer Integrated Process System,CIPS)、新一代编组站综合自动化(SAM)系统等已投入使用,图像识别、工业机器人、精准测速等技术日趋成熟并广泛应用,可见,设计一款驼峰解体自动摘钩装置,在列车5~7 km/h的推峰速度下,由提钩机器人按计划摘开车钩,部分代替人工完成提钩、护钩等作业已具备成熟的理论基础和技术水平,研究开发驼峰解体自动提钩装置的条件已经具备[1-3]。采用自动摘钩装置来协助或替代驼峰线上作业人员去完成危险且繁杂的摘钩作业后,可以全面提升编组站自动化水平,从而实现编组站改编能力、驼峰作业人员劳动生产率、调车作业安全保障水平以及编组站管理能力的全面提高。
2 工况分析
驼峰解体自动提钩装置安装在峰顶平台位置,工作环境处于室外,要适应风、霜、雨、雪、雾等各种恶劣天气,要适应强日照和夜间作业,要具备抵抗车厢散落物对设备的冲击破坏的能力,要满足无防护状态下的安全作业需要。根据编组场驼峰作业要求,设备正常情况下全年365 d、每天24 h待机,随时根据作业计划进行提钩作业,分解列车。
3 驼峰提钩位置计算模型
3.1 数学模型的创建
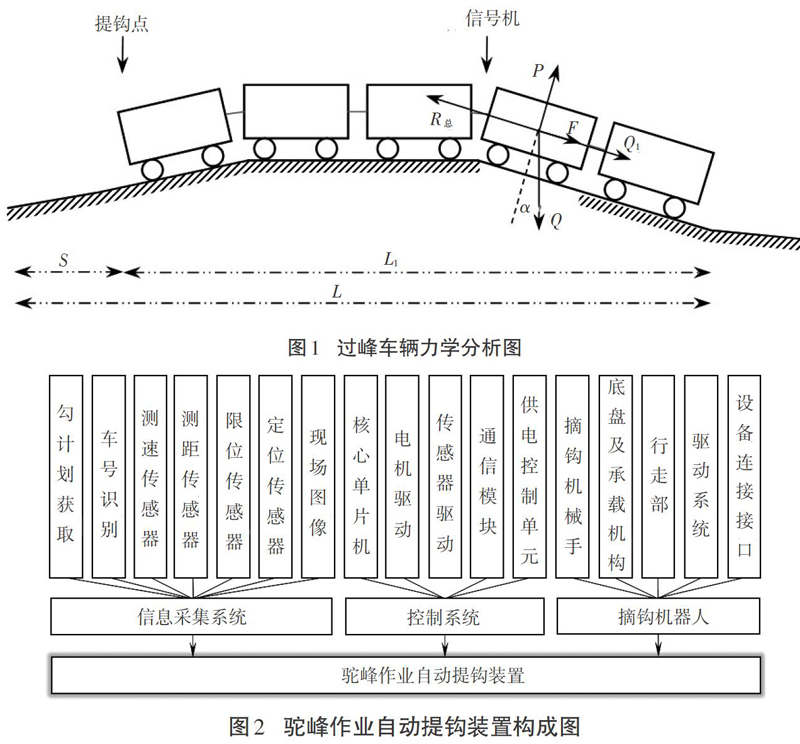
车辆编组从驼峰峰顶平台向调车场溜放的过程中,其受到自身及外界的作用力主要有车辆本身重力[Q]、推力[F]、车辆阻力[R总]、支撑力[P](见图1)。图1中,[S]为到达场到车组脱钩点的距离;[L]为到达场到驼峰信号机的距离;[L1]为该溜放车组的长度,[α]为斜坡和水平面的夹角[4-5]。
在车组从推送坡推送至峰顶平台,其溜放车的车钩处于压钩状态下,车钩容易被提开,称为提钩点;当车组继续推送,车组间的车钩就会绷紧,车钩提不开,称为脱钩点(或绷钩点)。该模型是在车钩绷钩临界点分析车组的力。假设在脱钩点时瞬间达到二力平衡,此时车辆纵向受到一个重力分力[Q1]、阻力[R总]和机车的推力[F],其关系如式(1)所示。
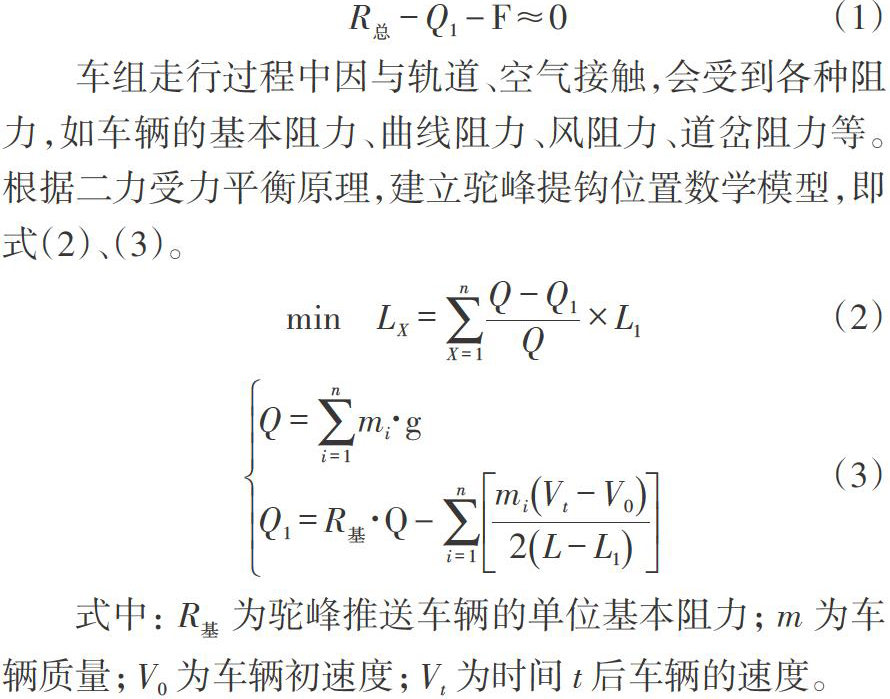
车组走行过程中因与轨道、空气接觸,会受到各种阻力,如车辆的基本阻力、曲线阻力、风阻力、道岔阻力等。根据二力受力平衡原理,建立驼峰提钩位置数学模型,即式(2)、(3)。
式中:[R基]为驼峰推送车辆的单位基本阻力;[m]为车辆质量;[V0]为车辆初速度;[Vt]为时间[t]后车辆的速度。
3.2 提钩位置模型计算
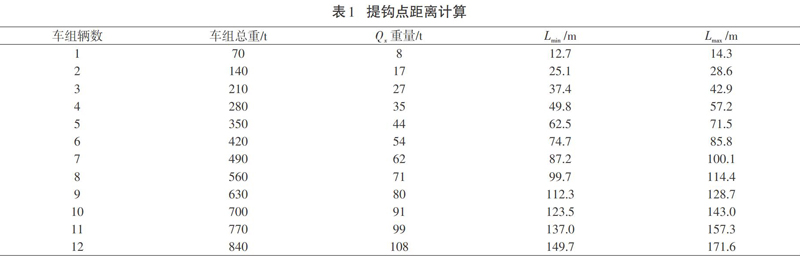
以C70车为例计算该模型的合理性。C70货车标记载重为70 t,换长为1.3,以驼峰主体信号机为原点,分别计算驼峰溜放1辆、2辆……12辆时最小的提钩点距离[Lmin];以驼峰主体信号机为原点,每勾车组的换长作为提钩点的最远距离,确定最远提钩距离[Lmax]。提钩点距离计算结果如表1所示。
4 系统方案的研究
驼峰作业自动提钩装置主要由信息采集系统、控制系统和摘钩机器人三大部分组成,如图2所示。从编组站综合集成自动化系统以及安装在峰顶平台的图像采集、速度测试、车号识别等装置获取的信息经计算机计算并分析判定后传输给控制系统,控制系统形成速度指令、位置指令、动作指令,机器人在接到相关指令后迅速匹配钩提杆形式及位置、车辆速度,指挥机械手臂完成摘钩和护钩动作[6-8]。
4.1 信息采集系统
信息采集系统主要负责四个方面的信息收集,包括在既有CIPS或SAM系统中提取勾计划、通过车号自动识别系统查询钩提杆形式及位置、利用图像识别确定钩提杆位置、采用摄像装备监控作业状况等,相关信息分类进入计算机进行判别。
4.2 控制系统
车站集中控制与车号处理系统将地面识别系统采集到的车辆信息传送到控制系统,控制系统将提取出的车号与勾计划进行匹配,判断是否提钩,并将提钩指令下达给提钩机器人。
4.3 提钩机器人
在驼峰作业区域,每条推峰线路两侧各设置一套自动提钩机器人,提钩机器人按照控制系统发出的指令完成提钩和护钩动作。一套机器人作业时,另一套提钩机器人在作业区始端待命,防止设备故障时影响驼峰解编作业。
5 机器人、导轨及能源系统的选择
考虑到室外环境,为适应大行程、高精度、高速运行等条件,机器人采用地面轮轨行走,行走采用齿轮齿条传动的方式。行走轨道敷设高度与作业通道地面一致,便于人工辅助作业。机器人伺服电机功率约为1.1 kW,设备安装在建筑限界外,停用时,机械臂横向股道外侧,不影响人工作业。
考虑到设备运行的稳定性,行走采用双轨,轨距约为500 mm(需要勘测现场情况)。导轨材料采用Q345合金钢。该合金材料为当前市场常用材料,焊接性能和加工性能优良,性价比高,同时可以满足设备强度要求。
整套装置采用外接电源的方式,外部电源的功率为6 kW,外接电源敷设。驱动机器人行走的伺服电机,根据机械臂自重和作用力大小,电机参数为:电压220 V、功率1.1 kW,驱动机械臂、机械手的伺服电机参数为:电压220 V、功率3 kW,控制系统的参数为:交流电电压220 V、功率0.5 kW。
6 关键技术的处理
6.1 驼峰主体信号的识别及反馈
建立一套驼峰信号采集子系统用于获取驼峰主体信号,系统由采集设备和工控机组成。
采集设备主要由电源屏采集器和信号机电灯电流采集板组成。其中,电源屏采集器实时监测电源屏输入/输出电压、电流、频率、相位,信号机电灯电流采集板实时采集驼峰信号机灯丝继电器(DJ)工作交流电流。电源屏信息通过485接口传输信息,灯丝监测采用CAN总线传输信息。监测信息传输给工控机后,由工控机进行隔离转换处理,并进行逻辑判断和显示意义匹配,同时将驼峰主体信号机的显示意义以指令的方式发送给机械臂控制系统。
6.2 勾计划的获取和识别
目前,在现场中使用的勾计划系统主要是CIPS或SAM编组站综合集成自动化系统,属于不同的公司开发。自动提钩系统在厂家提供的数据接口以及接口协议基础上开发对应的数据接口软件,对勾计划系统中的数据进行提取和处理,并将数据保存在控制计算机中。作为自动提钩系统的数据源,这种数据获取方式是最直接的,可以确保关键数据的有效性和完整性,而且开发数据接口周期短,工作量小,系统相互匹配性强,对其他设备不会造成影响。
6.3 速度测控技术
综合运用轮轴速度传感器和雷达速度传感器进行测速。车辆运行过程中,同时使用轮轴速度传感器和雷达速度传感器进行测速,并对轮轴速度传感器的速度信息和雷达速度传感器的速度信息进行比较,当轮轴速度传感器的速度信息与雷达速度传感器的速度信息差值在容许范围内,轮轴速度传感器信息作为基准速度信息;当差值超出容许范围,采用雷达速度传感器的速度信息进行速度补偿。系统软件主要是对测速传感器的测量数据进行计算处理,并将结果发送至机械臂控制系统。
6.4 定位技术
运用图像识别、激光雷达技术进行立体匹配,通过在多个点的集合中找出对应关系而求得各点的视差,然后根据视差信息和投影模型恢复原始景物的三维空间信息,计算目标提钩杆的三维坐标。摘钩作业过程中,车辆保持运动,机械臂需要在运动中完成摘钩作业,非匀速状态下的速度匹配后,需要快速进行图像识别并进行判断和执行指令。由于峰顶平台和机器人走行轨道长度有限,要求图像处理快速高效,所以选择区域特征匹配算法对图像进行立体匹配,同时可确保计算结果的精确性。
6.5 摘钩作业环境及摘钩力测试
我国货车车型繁多,生产年代不同,标准不一。车辆本身的提钩种类较多,按作用方式分为上提钩和下提钩两大类。加之结构各式各样,车辆侧面还有很多其他装置,如手闸制动杆、风管路接头、制动踏板等分布在车钩把的上下左右,阻碍机械手伸进和提钩动作。车辆提钩杆本身位置也不固定,使机械手不易抓住。各种结构复杂因素增加了自动提钩的难度。用弹簧测力计测试32台静止车体上的提钩力可知,实测值分布在30~200 N,多数集中在50~80 N。
7 结语
铁路编组站作业效率直接影响铁路运输系统的整体运输效率与运输秩序,提高编组站作业效率是提升路网整体输送能力和运输送达速度的关键,是适应铁路运量快速增长的有效手段。研究设计驼峰作业自动提钩装置,改变传统人工作业模式,可以协助或替代驼峰线上作业人员的工作,极大改善工人的工作环境,降低安全风险,提高作业效率,打通影响编组站作业综合自动化的瓶颈环节。当前,人工智能产业中图像识别、激光雷达和工业机器人已被广泛应用到各领域,而且技术日趋成熟。将机器人自动提钩技术运用到驼峰作业中,能克服人工提钩劳动强度大、安全性差以及提钩效率低的弊端。
通过研究可知,用行走式机器人来实现编组站摘钩作业自动化在技术上是可行的,但驼峰解体自动摘钩系统是一个亟待解决的世界难题,至今还是制约编组站全面自动化的关键所在。要真正实现驼峰解体自动化,就要确保运动状态下机器人的识别能力、分析能力、判断能力,确保其能准确完成各项指令。
参考文献:
[1]安迪,马玉坤,宋海锋,等.编组站提钩自动化智能识别设计[J].铁道运输与经济,2020(3):54-60.
[2]隋英楠,牛瑞雪,郝佳轩,等.驼峰解体提钩自动装置设计研究[J].建筑工程技术与设计,2018(6):1254.
[3]张所斌.基于自动摘钩机器人模型的设计与制作[D].成都:西南交通大学,2017:12-14.
[4]王战中,赵赛,刘超颖,等.铁路货运悬挂式自动摘钩装置设计与运动仿真[J].机械设计与制造,2013(6):215-220.
[5]何霄.驼峰提钩自动化系统中目标捕捉的研究[D].兰州:兰州交通大学,2013:33-38.
[6]臧立超.铁路货车摘钩机器人设计与仿真研究[D].石家庄:石家庄铁道大学,2013:13-20.
[7]何霄,李国宁,翟琛.基于双目立体视觉技术的驼峰自动摘钩设备研究[J].科学技术与工程,2013(6):1526-1531.
[8]王小东,谢金虎,崔炳谋,等.驼峰解体作业中自动提钩机制的研究[J].铁路计算机应用,2008(4):5-8.
- 智慧城市视野下城市规划创新探究
- 基于因子分析法失地农民的城市融入评价体系
- 我国农民工社会政策的演变路径探析
- 城乡一体化背景下的农村电子商务发展研究
- 城镇化背景下现代农业金融的发展思路研究
- 通向城市户籍制度改革的阶梯
- 江苏城乡二元结构现状及实现城乡统筹的政策建议
- 加强农村基层党组织建设探究
- “村改居”法律程序的缺失与完善
- 淮安市人口城镇化与土地城镇化的协调关系研究
- 火力发电厂动态成本的分析与探究
- 构建循环经济下会计核算体系的路径探究
- 用生态文明建设助推佳木斯经济振兴发展
- 以转型推进能源企业的可持续发展分析
- 大兴安岭地区碳汇量市场经济化机制初探
- 生态农业视域下农村经济可持续发展道路探究
- 化工行业环境风险评估研究
- 发展我国低碳经济探析
- 雾霾现象对我国造成经济损失分析和治理方案研究
- 老河口市相对资源承载力与可持续发展研究
- 绿色会计若干问题的原因及探析
- 鞍山生态矿山平台构建的对策研究
- 云服务环境中低碳型教育信息化模式研究
- 加大广西农村水利设施建设金融扶持的思路分析
- 京津冀大气污染的财税政策选择研究
- inherited
- inheriting
- inheritor
- inheritors
- inheritresses
- inheritrices
- inheritrixes
- inherits
- in-her-stocking-feet
- inhibit
- inhibitable
- inhibited
- inhibitedly
- inhibitedness
- inhibiter
- inhibiting
- inhibitingly
- buffeter's
- buffeters
- buffeting
- buffets
- buffet²
- buffet¹
- buffing
- buffish
- 绮岁
- 绮岁如流
- 绮帐
- 绮席
- 绮幔
- 绮幕
- 绮年
- 绮年玉貌
- 绮怀
- 绮态
- 绮思
- 绮情
- 绮户
- 绮才
- 绮札
- 绮构
- 绮栊
- 绮树
- 绮梦
- 绮楼
- 绮榭
- 绮槛雕栏
- 绮注
- 绮琴
- 绮琴化洽