陈金舰


摘 要:目前,甘蔗种植耗时长、劳动强度大,人们需要提高种植过程的机械化和智能化水平,而YOLOv3算法可以为机械数据采集和实时处理提供有力支持,因此有必要基于YOLOv3对甘蔗茎节实时動态识别与机械臂轨迹仿真进行研究。本文通过提取甘蔗茎节信息和构建YOLOv3网络结构对甘蔗茎节进行实时动态识别,提高识别效率和精确度;通过建立机械臂虚拟样机,对机械臂运动学进行仿真,提高轨迹仿真正确性。经过试验验证和对比分析,设计的实时动态识别和轨迹仿真方法具有较好的准确性,能够应用于甘蔗实际种植中。
关键词:YOLOv3算法;甘蔗茎节;动态识别;轨迹仿真
中图分类号:S566.1文献标识码:A文章编号:1003-5168(2021)02-0012-03
Real-time Dynamic Recognition of Sugarcane Stem Nodes and Simulation of Robotic Arm Trajectory Based on YOLOv3
GUO Jinjian
(ZhanJiang Preschool Education College (Basic Education College of Lingnan Normal University),Zhanjiang Guangdong 524000)
Abstract: At present, sugarcane planting is time-consuming and labor-intensive, people need to improve the mechanization and intelligence level of the planting process, and the YOLOv3 algorithm can provide strong support for mechanical data collection and real-time processing, therefore, it is necessary to study the real-time dynamic recognition of sugarcane stem nodes and the simulation of manipulator trajectory based on YOLOv3. In this paper, the real-time dynamic recognition of sugarcane stem nodes was carried out by extracting the information of sugarcane stem nodes and constructing the YOLOv3 network structure to improve the efficiency and accuracy of recognition; by establishing a virtual prototype of the robotic arm, the kinematics of the robotic arm was simulated to improve the accuracy of the trajectory simulation. After experimental verification and comparative analysis, the designed real-time dynamic identification and trajectory simulation methods have good accuracy and can be applied to actual sugarcane planting.
Keywords: YOLOv3 algorithm;sugarcane stem section;dynamic recognition;trajectory simulation
甘蔗是我国重要的经济农作物,不仅是制作蔗糖的主要原料,还是化工产业的重要原料。机械臂装置是甘蔗种植过程的关键部件,是提高作业效率的关键,对于提高甘蔗质量和生产收益、降低成本具有重要作用[1]。YOLOv3算法能够对甘蔗特征进行识别定位,为种植机械数据采集和实时处理提供有力支持,进一步提高检测速度和识别效率[2]。因此,本文基于YOLOv3对甘蔗茎节实时动态识别与机械臂轨迹仿真进行研究。
1 基于YOLOv3的甘蔗茎节实时动态识别
1.1 提取甘蔗茎节信息
在采集的甘蔗图像中,甘蔗目标只占少部分区域,剩余大部分区域为背景,复杂的背景对甘蔗茎节的识别产生一定影响,因此在进行动态识别前首先需要从图像中分割甘蔗目标,提取其信息特征。一方面,可以缩小图像识别范围,降低背景对茎节识别的干扰,减小后续算法输入规模,提高运行效率;另一方面,甘蔗目标的直径和横轴交角是算法的关键参数,为分析茎节粗度和定位提供重要参考依据[3]。迭代线性拟合算法可用于估计甘蔗目标的近似线性趋势,根据图像白点像素聚集程度趋近于实际目标的标准,分割甘蔗目标。下面以图像的某像素位置为中心,将周围区域的白点像素数与面积的比值定义为图像局部密度,其计算公式可以表示为:
[ρx=1Jxi∈JxIi]? ? ? ? ? ? ? ? ? ? ? ? ?(1)
式中,[ρx]为图像局部密度;[x]为某一像素位置;[Jx]为该像素的局部邻域像素集合;[Ii]为图像的像素值。
若将图像的所有像素位置替换成局部密度值,则甘蔗图像转化为局部密度图像,再通过阈值抑制过滤干扰像素,具体公式可以表示为:
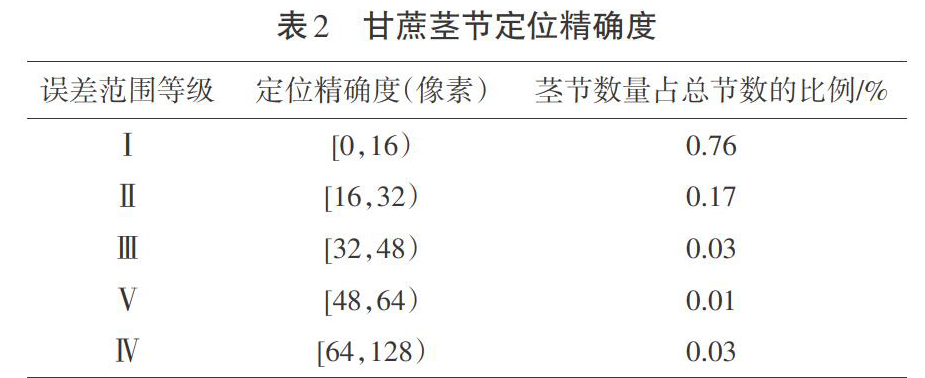
[ρx=0,ρx 式中,[l]為过滤阈值;[m]为低抑制比例;[n]为高抑制比例;[am,n]为去除低值和高值后的密度平均值。 下面通过调整双抑制阈值,对图像执行边缘算子操作,得到甘蔗目标线性趋势信息,进而确定目标基线位置[4-5]。迭代后,稳定的拟合线与横轴的相交角度可作为甘蔗目标与横轴交角的特征信息估计。本研究通过白点像素距离计算甘蔗目标直径,沿横轴方向将图像划分为列块集合,列块高度可以表示为: [Hb=Ve-Vs]? ? ? ? ? ? ? ? ? ? ? ? ? ? (3) 式中,[Hb]为每个列块高度;[Ve]为经纵向投影后的最前面非零值位置;[Vs]为最后面非零值位置。 下面计算所有列块的高度,在高度集合中删除极大和极小值,剩余列块的平均高度值即甘蔗的直径,甘蔗直径的估算公式可以表示为: [GH=1BSl∈BSHBSl]? ? ? ? ? ? ? ? ? ? ? ? ?(4) 式中,[GH]为甘蔗直径;[BS]为列块集合。 通过对甘蔗目标进行分割,人们可以得到横轴交角和甘蔗直径的特征信息估计。 1.2 构建YOLOv3网络结构 YOLOv3网络是一种物体定位识别算法,具有定位速度快、识别效率高的特点,主要通过计算损失函数,检测不同尺度大小的目标[5]。本文采用的损失函数可以表示为: [LP,W=p=1Pa×log1-gxp,Wyp=0b×log1-gxp,Wyp>λoothers]? ? ? (5) 式中,[P]为甘蔗图像;[W]为网络学习参数;[g]为激活函数;[λ]为正负样本判定参数;[a]为负样本系数;[b]为正样本系数;[xp]和[yp]为图像像素点坐标。 检测图像像素边缘性时,本研究采用多分辨率模式,以1、2和5为倍数变换图像分辨率,将其输入卷积神经网络,根据网络输出的平均结果得到边缘检测指标。 1.3 甘蔗茎节定位识别 在卷积神经网络中输入甘蔗图像,可以得到边缘概率图像,其像素值表示该位置为边缘点的确信程度。首先从边缘概率图像中提取甘蔗目标茎节信息,对图像执行启发式茎节定位算法。根据给定阈值范围和阈值变化步长,可以得到二值化图像系列,具体表示为: [Per=BerP,tt∈T]? ? ? ? ? ? ? ? ? ? ? ? (6) 式中,[Per]为二值化图像系列;[Ber]为图像二值化操作;[P]为边缘概率图像;[T]为步长变化。 变量[T]用公式可以表示为: [T=ts-n×0.02>e,n=0,1,2...]? ? ? ? ? ? ? ? ?(7) 式中,[s]为起始阈值;[e]为终止阈值。 生产验证模板验证二值图像,提取茎节边缘线。接着,对候选位置进行验证,以每个候选位置对应横轴为参考,纵向上移动验证模板,验证完所有二值化图像系列,对保留区域进行逻辑操作,得到茎节识别结果。 2 甘蔗种植机的机械臂轨迹仿真 2.1 建立机械臂虚拟样机 首先使用SolidWorks软件建立机械臂模型及装配体模型,为构建虚拟样机奠定基础。装配的主要部件包括机械臂上臂、下臂、转动座和固定座等,按照实际配合关系生成装配体。然后,选择整个装配体模型进行静态干涉检查,修正各部件的相对位置,直至整体不存在干涉部位。接下来,检测动态干涉情况,根据实际情况对机械臂添加旋转副和运转函数,选取适当的驱动马达速度值,检查全局干涉情况,进一步确保三维模型的正确性。将修正好的三维机械臂模型复制到ADAMS工作目录中,构建机械臂虚拟样机。在ADAMS设置好工作环境,依次定义和添加机械臂各个零件的材料属性,并根据部件间相对运动关系添加模型约束,达到整体约束效果。为确保各转动副能按预期运动,人们需要对模型添加驱动设置,经过以上步骤,完成机械臂虚拟样机的构建。 2.2 机械臂运动学仿真 机械臂运动学仿真由正运动和逆运动两部分组成,正运动仿真实质是根据各关节旋转角度,推导空间坐标位置和形态;逆运动仿真实质是由空间坐标位置和形态,反向推导各关节旋转角度。首先建立连杆坐标系[D-H],得到齐次变换矩阵。 构建虚拟样机,为机械臂轨迹仿真奠定了基础。在验证模型信息正确后,人们可以利用ADAMS的测量和输出功能,对模型进行参数提取和运动轨迹仿真。 3 试验结果与分析 3.1 甘蔗茎节实时动态识别效果 为检验本文提出的甘蔗茎节识别方法的效果,笔者设计10组试验,原始图像像素大小为1 280[×]1 024,试验结果如表1所示。 由表1可知,本文设计的甘蔗茎节实时动态识别方法的识别率较高,识别速度也较快。为验证本文方法的茎节定位精度,笔者设计定位误差试验,其共分为5个误差等级,试验结果如表2所示。 由表2可知,93%的甘蔗茎节的定位误差处于32像素以内,表明甘蔗图像经过识别后,茎节附近的边缘线与其他区域存在较大差异,具有一定的独特性,边缘线可作为茎节识别的重要依据[6-8]。 3.2 甘蔗茎节识别效果对比测试 为检测本文甘蔗茎节识别方法的有效性,本研究将本文方法设置为试验组,将基于小波变换和结构化机器学习的茎节识别方法设置为对照组,分别从茎节完整识别率、消耗时间和定位精确度三个指标对识别方法进行对比,其中定位精确度用误差在32像素以内的茎节数量比例表示,对比结果如表3所示。 由表3的对比结果可知,与其他两种方法相比,本文设计方法具有速度快、识别率高和精度高的特点,具有较高的实用性。 3.3 机械臂轨迹仿真对比测试 为检验本文机械轨迹仿真方法的有效性,本研究将其与其他两种传统方法进行对比测试,从仿真准确度、运动平均速度和时间三个指标评价仿真方法的效果,对比测试结果如表4所示。 由表4对比结果可知,本文设计的轨迹仿真方法具有准确率高和速度快的特点,可应用于实际的機械臂运动空间求解中。 4 结语 本文基于YOLOv3对甘蔗茎节实时动态识别与机械臂轨迹仿真进行研究,提高了甘蔗茎节的识别精确度和机械臂轨迹仿真的准确度,有助于进一步促进甘蔗种植的机械化发展。对于机械臂的轨迹仿真,本文没有考虑运输面板对机械臂的影响,以后研究可以对机械臂最小轨迹路线和运输截面角度进行探讨。 参考文献: [1]齐榕,贾瑞生,徐志峰,等.基于YOLOv3的轻量级目标检测网络[J].计算机应用与软件,2020(10):208-213. [2]吴疆,孙怡峰,汤光明,等.基于改进YOLOv3的同步目标定位与多种属性识别[J].计算机应用,2020(1):1-7. [3]蔡锦华,祝义荣.基于改进YOLOv3的目标跟踪算法研究[J].计算机仿真,2020(5):213-217. [4]郭无极,杨望,温翔,等.切段式甘蔗收割机排杂仿真建模方法研究[J].农机化研究,2020(8):6-12. [5]盛奋华,陈祖爵.基于虚拟仿真技术的甘蔗收割机喂入装置研究[J].农机化研究,2016(9):59-63. [6]张东红,吴玉秀,陈晨.基于图像处理的甘蔗茎节识别与蔗芽检测[J].洛阳理工学院学报(自然科学版),2019(2):67-72. [7]石昌友,王美丽,刘欣然,等.基于机器视觉的不同类型甘蔗茎节识别[J].计算机应用,2019(4):1208-1213. [8]温翔,杨望,郭无极,等.切段式甘蔗收割机排杂离散元仿真参数标定及验证[J].中国农机化学报,2020(1):12-18.
- 商业银行贷前调查中财务分析工作存在的问题
- 加强财务信息化建设,提升财务管理水平
- 加强油田企业全面预算管理的探讨
- 预算编制与预算执行管理中的难点和对策
- 经济转型发展下煤炭企业财务管理工作分析
- 中小企业预算管理和财务控制研究
- 试析高速公路工程建设项目财务管理
- 试析企业如何加强全面预算管理
- 新形势下事业单位财务管理的问题与对策
- ERP视角下的企业全面预算管理优化
- 浅谈PDCA循环管理在公立医院财务管理的作用及具体应用
- 浅析医院财务管理中的会计审核及内控制度建构
- 新形势下构建行政事业单位预算管理模式探析
- 事业单位财务管理信息化建设探讨
- 探究医院全面预算管理流程及成本控制的关键点
- 浅谈小企业如何充分发挥财务管理作用
- 浅析加强财政资金全面预算管理和项目资金绩效评价的现实意义
- 如何应用医院总会计师制度强化医院财务经济管理
- 战略导向下,与相关管控工具融合的全面预算
- 科技企业发展中的风险投资与私募股权投资支持研究
- 证券公司内部控制的探讨
- 非营利性科研机构绩效考评体系探讨
- 媒体关注对并购绩效的影响
- 农业科研单位项目资金的绩效管理与评价研究
- 浅析公路行业人力资源管理存在的问题及对策
- unrescuable
- unrescued
- unresembling
- unresented
- unresentful
- unresentfully
- unresentfulness
- unresentfulnesses
- unresenting
- unreserved
- unreservedly
- unreservedness
- unreservednesses
- unresident
- unresidential
- unresidual
- unresigned
- unresilient
- unresiliently
- unresistant
- unresolute
- unresolutely
- unresoluteness
- unresolutenesses
- unresolved
- 跑了电的戏匣子——没完没了
- 跑了的是大鱼
- 跑了羊修圈
- 跑了耗子来了狐狸
- 跑了虾公捉到鲤鱼
- 跑了跑了,一跑百了
- 跑二排
- 跑二腿
- 跑京
- 跑信
- 跑关系
- 跑兵荒
- 跑冒滴漏
- 跑出去的马好抓,说出去的话难收
- 跑出去的马好抓,说出去的话难追
- 跑到旱岸上捕鱼虾——根本没影儿的事
- 跑单帮
- 跑发
- 跑合
- 跑合儿
- 跑圆场
- 跑圈儿
- 跑在头里的兔子先挨枪
- 跑堂口
- 跑外