孙念明+王波


[摘要]双转台五轴数控机床是进行精密、复杂工件加工的主要设备。由于其内部结构较为复杂,导致误差补偿设计难度较大。文章以双转台五轴数控机床为基础,相应建立移动轴、旋转轴运动数学模型,将工件坐标系当作基础坐标系,通过齐次坐标系变换理论,对其轴运动在基础坐标系中的误差表达式进行推导。针对五轴机床设备两种轴的运动耦合情况,相应提出一种分步实施补偿方法,即优先完成姿态误差补偿再进行误差补偿,尽量调整工件姿态与理想姿态一致。仿真实践证明该方法有助于提高加工精度,可有效避免因补偿导致的运动干涉问题,具有较高的有效性和可行性。
[关键词]五轴数控机床;误差;实时动态补偿;运动模型研究
[DOI]10.13939/j.cnki.zgsc.2017.08.204
双转台五轴数控机床是目前进行精密、复杂工件加工的主要设备,其内部同时存在移动轴和旋转轴,一次装夹即可完成形状较为复杂的自由曲面加工作业,缩短加工周期的同时,有效避免了多次加工可能造成的误差问题,从根本上提高了工件加工质量。在多种因素的共同影响下,五轴数控机床实际工作中不可避免地存在机床误差,并且由于五轴数控机床多出两根旋转轴、内部结构更加复杂,导致其误差元素众多且更加复杂。处于工件加工质量和经济性考虑,对五轴数控机床进行误差补偿具有重要的现实意义。本文针对五轴数控机床内部轴的运动进行了细致分析,相应提出了一种误差补偿方法,具体内容如下。
1五轴数控机床结构特点分析
双转台五轴数控机床是五轴机床的一种常见形式,内部拥有两个旋转轴和三个移动轴,旋转轴均存在于工件运动链一侧,具有总体刚性高、工艺性能优良、坐标行程范围广等特点。
2五轴数控机床轴的运动分析
出于数控编程便捷性考虑,将工件坐标系作为运动分析过程中的基础坐标系,其中各运动轴和刀具的运动均表示成工件坐标系中的变量。本组方法中,五轴数控机床的误差补偿,主要通过针对运动轴输入相应的补偿值,调整工件姿态和刀具位置实现。具体坐标变化关系如图1所示。
首先建立工件坐标系、刀具坐标系以及参考坐标系,其中工件坐标系OWxWyWzW,对应刀位数据源文件;刀具坐标Otxtytzt,表示与刀具固联对应的坐标系,刀尖即为原点;参考坐标系Omxmymzm,参考坐标系表示与旋转轴C固联对应的坐标系,A、C两旋转轴的交点就是该坐标系的原点。
建立工件坐标系之后,其中任意一点对应矢量均可以用V表示,方向矢量和位置矢量可分别表示为(x,y,z)和(i,j,k)两种形式,通过下标具体区分不同的状态和位置。
3双转台五轴数控机床误差的解耦补偿分析
在机床实际工作过程中,工件加工精度是由工件和刀尖的相对位置决定的。对于工件加工的任意时刻,如掌握工件坐标系中的刀尖O1的坐标信息、参考坐标系原点O的坐标信息以及刀尖的实际方向矢量信息,即可借助坐标系关系获得五个运动轴的实际位移值。对比五个运动轴的理想位移值和实际位移值,如二者存在偏差则表示,此状态下进行加工会导致工件尺寸误差,记为Δ。而各运动轴实际位移值与理论位移值间的差值,就是具体的补偿误差,在相应的数控程序中输入方向相反、大小相同的补偿值,即可抵消误差,提高工件加工精度。
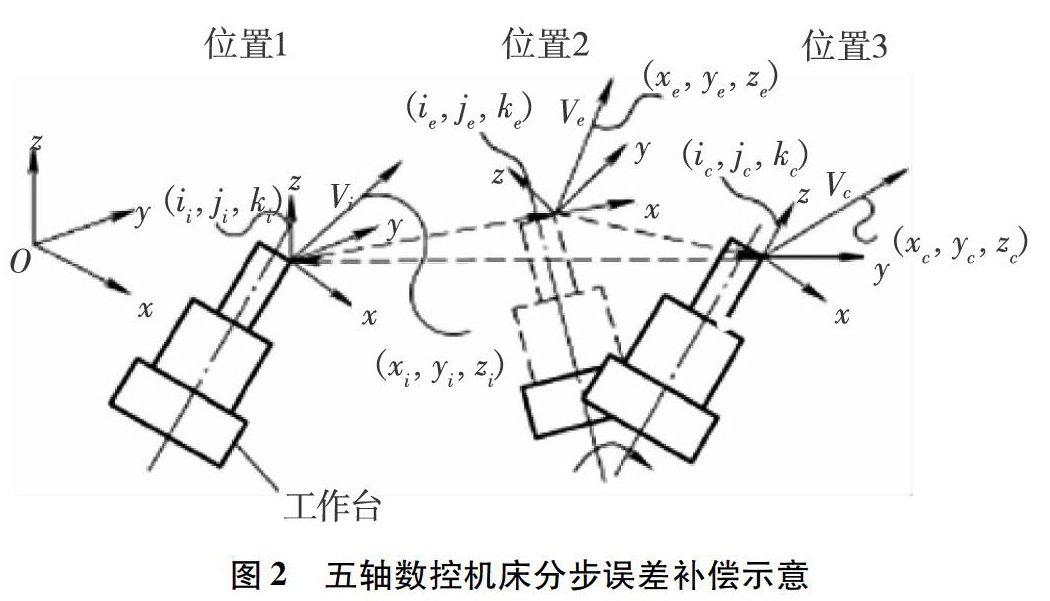
就双转台五轴数控机床而言,对其操作进行误差补偿的难点主要在于,其同时拥有两个旋转轴。在机床工作过程中,其旋转轴和移动轴同时进行运动,旋转轴的工作转动将直接影响工件在移动轴方向的实际运动情况,也就是说即使移动轴坐标与理论位置一致,在旋转轴位置调整过程中,也会对工作台位置造成影响,即在平移运动和转动运动间存在耦合,針对这一情况,简单的轴补偿不发满足机床实际补偿要求,必须充分考虑到移动轴和旋转轴间的运动影响关系,优先进行解耦处理,在进行分布补偿,才能有效提高误差补偿的准确性和有效性。分步补偿的具体步骤为,先完成姿态补偿,在完成位置补偿,实际过程如图2所示。
在图2中,位置1表示工件理想位置,位置2表示工件实际位置。在实际补偿过程中,先调整转动轴对工件姿态进行调整,使其方向矢量保持与理论状态一致,即调整至位置3。受旋转轴与运动轴间的耦合影响,工件对应的位置矢量也会发生一定的变化,此时通过调整移动轴即可完成位置补偿,除原始位置误差外,还需补偿因转动轴运动导致的新误差,最终完成对工件的误差补偿。
3.1姿态补偿调整分析
姿态补偿调整是指位置2调整至位置3的过程,利用坐标系关系可表示为(ic,jc,kc)调整至(ie,je,ke),从而形成全新的刀尖矢量,记为Vc。
4仿真分析
曲面轮廓工件是双转台五轴数控机床加工的典型零件。借助UG软件构建相应的曲面轮廓工件实体造型,并在此基础上进行加工验证,记录生成的刀位数据文件信息。
实际操作过程中,工作人员在加工工件轮廓表面选取采样点10个,通过相应的数学计算,得出准确的零件尺寸误差。随后,根据本文阐述的分步误差补偿方法,建立相应的误差补偿数学模型并编制相应的补偿程序。将采样点的计算误差参数依次输入建立的模型程序,核算各采样点的位置补偿误差和姿态补偿误差,随后将补偿误差输入至原始的刀位文件,并相应生成修改完成的刀位文件,最终得到相应的零件补偿仿真模型。
仿真实践分析可得出以下两点结论:一是分步误差补偿方法可有效降低机床误差最大值,同时使残余误差分布变得更加均匀,即有效减小均方差;二是就五轴联动机床而言,对其进行误差补偿还需综合考虑不同轴的耦合关系,优先进行姿态误差补偿、随后进行位置误差补偿,以提高误差补偿准确度。
5结论
综上所述,五轴数控机床作为现阶段进行复杂工件加工的主要手段,在数控机床领域占据重要地位。受其内部结构复杂性影响,进行误差补偿具有一定的难度。本文从五轴数控机床中不同轴的运动入手,相应提出了先进行姿态误差补偿、后进行位置补偿的误差补偿方法,经仿真实践证明,具有较高的可行性和有效性。
参考文献:
[1]张宏韬.双转台五轴数控机床误差的动态实时补偿研究[D].上海:上海交通大学,2011.
[2]姜辉.五轴数控机床几何与热误差实时补偿关键技术及其试验研究[D].上海:上海交通大学,2014.
[3]张宏韬,杨建国,姜辉,等.双转台五轴数控机床误差实时补偿[J].机械工程学报,2010(21).
[4]何振亚.五轴数控机床几何与热致空间误差检测辨识及模型研究[D].杭州:浙江大学,2014.
[5]张毅.数控机床误差测量、建模及网络群控实时补偿系统研究[D].上海:上海交通大学,2013.
- 配网电力工程技术的可靠性发展研究
- 浅议电能计量装置改造的技术措施
- 双梁桥式起重机结构设计和优化分析
- 论企业市场经济发展中宏观经济管理的重要性及措施
- 新技术研发珠宝和先进技术鉴定方法刍议
- 电力系统接地与等电位浅谈
- 基于电网储能电站储能变流器PCS运行故障分析
- 食品品质、安全检测技术
- 城市住宅燃气管道工程的施工安装技术
- 道桥施工中的混凝土施工技术探究
- 关于文物古建筑修缮施工前的技术工作要素探索
- 水利水电工程施工中导流及围堰技术分析
- 门式双梁起重机小车轨道焊接工艺的改进
- 电力输配电线路中的节能降耗技术的探讨
- 弹体尾喷管密封结构有限元分析
- 三维建模技术概述
- 电力基建现场安全管理工作分析
- 农田水利工程给排水施工技术质量和控制分析
- 探讨基层农艺技术推广和应用的强化途径
- 焦化烟气脱硫脱硝除尘一体化工艺技术探讨
- 机械电气设备自动化调试技术的相关分析
- 金矿选矿废水处理工艺概述
- AN(Ⅱ)装置
- 大数据时代下基于OKR的公司内部绩效管理模式分析
- 甜樱桃采后病害、贮藏期间品质变化及其防腐保鲜技术
- noncontingent
- noncontingently
- noncontinuable
- noncontinuably
- noncontinuation
- noncontinuations
- noncontinuities
- non-continuity
- noncontinuity
- noncontinuously
- noncontinuousness
- noncontinuousnesses
- noncontraband
- noncontrabands
- noncontract
- noncontraction
- noncontractions
- noncontracts
- noncontractual
- non-contradiction
- noncontradictions
- noncontradictories
- non-contradictory
- noncontradictory
- noncontributable
- 作冰
- 作决定
- 作准
- 作凶事,为凶人
- 作出判断
- 作出判断和决定
- 作出发准备
- 作出最后结论
- 作出某种暗示
- 作出结论
- 作刁
- 作刘参谋
- 作则
- 作则垂训
- 作刚作柔
- 作判断
- 作别
- 作制
- 作剑
- 作剧
- 作力
- 作劲
- 作势
- 作协
- 作反