
【摘 要】PID控制是《计算机测控技术》课程的主要内容之一。文章主要针对该内容从PID控制算法理论分析、Matlab验证PID控制规律以及实验温度PID闭环控制三个方面进行分析,提出了一些有针对性的教学建议和方法。
【关键词】《计算机测控技术》 PID控制 教学探讨
随着科学技术的飞速发展,采用计算机来实现控制成为现代化生产的必然要求[1]。《计算机测控技术》是我校自动化专业的专业主干课程之一,本课程的目的就是使学生掌握计算机控制系统的硬件、软件的选择、组织配置、设计及应用,即计算机在工业领域中的监测技术以及在该领域内的应用特点。PID控制器设计是《计算机测控技术》的主要内容之一,一般的计算机控制技术教材中都有关于PID控制的内容,主要包括:位置式PID算法、增量式PID算法、PID控制算法的改进和PID参数整定等[2]。但是在教学过程中,很多学生反映这部分内容比较难学,接受和理解起来较为困难。本文从PID控制算法理论分析、Matlab验证PID控制规律以及实验温度PID闭环控制三个方面进行分析,提出了一些有针对性的教学建议和方法,加强理论与实践之间的联系,以提高本部分课程内容的教学质量和教学效果。
一、PID控制算法理论分析
将偏差的比例(P)、积分(I)和微分(D)通过线性组合构成控制量对被控对象进行的控制,称为PID控制。在生产过程自动控制的发展过程中,PID控制是历史最久、生命力最强的一种控制方式。因此,PID控制算法一直是控制相关专业的教学重点,在《自动控制原理》《自动控制仪表》《过程控制系统》和《计算机测控技术》等课程中都有所涉及,只是讲解的侧重点不同。
《计算机测控技术》这门课程主要介绍数字PID控制器的原理及设计方法。由于学生在前期课程中接触过模拟PID算法,所以在具体教学时,我们首先按照比例、积分和微分的顺序分别介绍PID的三种控制作用以及对一般控制系统的动态特性影响;接着讨论三种控制方式组合后P、PI、PD及PID的优缺点;在此基础上,推导出数字位置式PID算式与增量式PID算式,并对这两种算法从数学和应用的角度进行比较分析。
除标准PID算法外,为使PID控制更加灵活多样,更满足对控制系统提出的各种要求,还有各种各样的改进PID算法,如积分分离的PID算法、变速积分的PID算法、不完全微分的PID算法以及带死区的PID算法等。在课堂教学中,教师要注意讲解为什么要提出这些改进的算法,并将改进的算法与标准PID算法进行性能对比。
二、Matlab验证PID控制规律
Matlab软件在数值分析、矩阵运算、信号处理和自动控制等方面都有广泛应用,它内含的动态系统仿真工具Simulink通过方块图的方式来构建系统,可以方便、快速地找到能使系统达到满意性能指标的参数,并以图形的形式反映仿真结果[3-4]。将Matlab引入到《计算机测控技术》课程PID控制部分的教学中,不仅有助于学生对该部分内容的掌握和理解,使学生认识到PID控制规律的本质,还可以培养学生的创造性思维能力。
与PID控制密切相关的参数有比例系数Kp、积分系数Ki和微分系数Kd,熟悉这三个重要参数对过渡过程的影响,有助于快速调节自动控制系统。我们以一个简单的单回路闭环控制系统为例来说明PID作用对控制过程的影响。假设被控对象的传递函数为:,在单位阶跃输入信号作用下,用Matlab仿真来研究参数Kp、Ki、Kd对控制过程的影响。
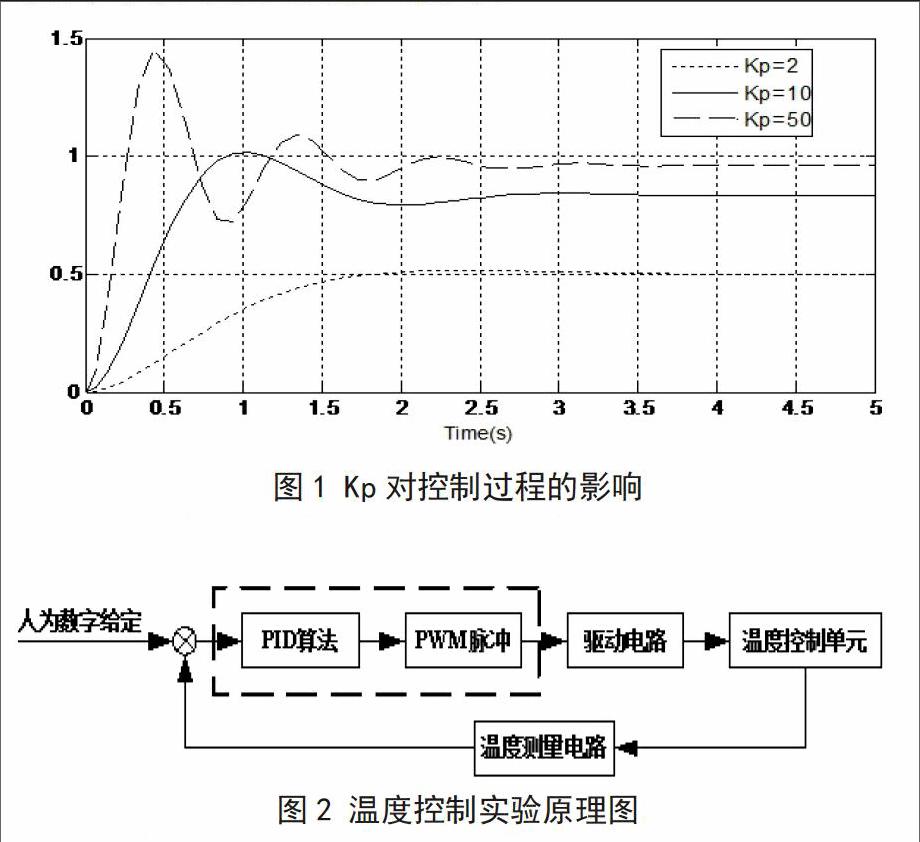
首先采用纯比例控制,图1给出了比例系数Kp变化时的系统阶跃响应曲线图。从图中可以看出:单纯的比例控制无法使系统稳态误差为0,即单纯的比例控制是有差调节。当Kp较小时(Kp=2),稳态误差较大;随着Kp增大(Kp=10),稳态误差逐渐变小;Kp再进一步增大(Kp=50),稳态误差较小,但同时系统振荡也增加了。
图1 Kp对控制过程的影响
三、实验温度PID闭环控制
我们的实验是在西安唐都科教仪器公司开发的TD-PITE实验平台上进行的。温度闭环控制原理如图2所示。人为数字给定一个温度值,与温度测量电路得到的温度值(反馈量)进行比较,其差值经过PID运算,将得到控制量并产生PWM脉冲,通过驱动电路控制温度单元是否加热,从而构成温度闭环控制系统。
图2 温度控制实验原理图
下载PID程序调试运行后,改变PID参数IBAND、KPP、KII、KDD,重复实验,观察实验现象,找出合适的参数并记录。其中,实验参数的含义及取值范围如表1所示。
PID控制器控制效果的好坏在很大程度上取决于参数Kp、Ki和Kd的选取是否合适。确定这些参数可以采用理论分析方法,但是工程上一般采用试凑法、扩充临界比例度法或扩充响应曲线法等实验方法来确定,特别是系统被控对象模型参数不确定或不准确时,实验方法较为有效。课堂教学中关于这三种工程整定方法的基本原理和步骤都已详细介绍过。本实验中,我们安排学生根据具体需要选择相应的参数整定方法,并在参数整定过程中,要求学生进一步总结参数整定的经验,以进一步理解PID 控制作用。
【参考文献】
[1]李曼.自动化生产中的计算机控制技术[J].数字技术与应用,2013(03):16.
[2]林敏.计算机控制技术及工程应用[M].北京:国防工业出版社,2010.
[3]高珏.Simulink仿真在PID控制教学中的探索与设计[J].广州化工,2013,41(20):199-200,212.
[4]西安唐都科教仪器公司.80X86微机原理及接口技术实验教程[EB/OL].http://www.doc88.com/p-2002478883717.html,2012.
- 一封家书墨盒赏析
- 《艺苑重光》补遗与勘误
- 王国平书法作品
- 中国书法之歌
- 宜春学院美术与设计学院学生作品
- 浅析广彩瓷器
- 公共艺术社会关系的分化之我见
- 实验动画教学中视觉表现形式的局限与拓展
- 浅析几何图形元素在现代平面设计中的应用
- “读图时代”的新课题
- 美术教育与企业有效经营的思考
- 民俗纪实
- 民国的罗曼蒂克,已在武汉复兴
- 从康震教授的对联说起
- 执子之手,与子偕老
- 李剑华:和风景共生
- 万有楼高塞太虚
- 文化缺失
- 让她们的梦想都能够开花
- 梦想的力量
- 顶天立地李艳红 十年诲人曹隽平
- 十年书法扶贫让大山里的她梦想开花
- 一位湖南农妇的书法逐梦路
- 在艺术的天空里抒写自由与浪漫的女性情怀
- 沐兮九江 浩弥远凉
- biaswise
- bias²
- bias¹
- bib
- bibation
- bibbed
- bibbing
- bible
- bibles
- bible's
- bibless
- biblike
- bibliographer
- bibliographical
- bibliographically
- bibliographies
- bibliographize
- bibliography
- bibs
- bibs'
- bicarbonate
- bicarbonate of soda
- bicarbonates
- bicarbonate soda
- bicentenaries
- 女子洁白柔嫩的肌体
- 女子洁白纯净的面色
- 女子洁白美丽
- 女子流泪,娇美可爱
- 女子浅红色的妆饰
- 女子浓密秀美的头发
- 女子浓黑的头发
- 女子消瘦憔悴
- 女子清丽婉转、美妙动听的声音
- 女子清秀的眉毛和明亮的眼睛
- 女子温柔貌美
- 女子灵巧纤长的手
- 女子爱悦男子
- 女子爱情上的伤害和嫉妒
- 女子爱慕的美男子
- 女子爱慕美男子
- 女子状如初月的秀眉
- 女子玩赏芳香的鲜花
- 女子由家长做主,跟某人婚配
- 女子白润的肌肤
- 女子白里透红的美丽容颜
- 女子的人品贤淑娴雅
- 女子的仪容
- 女子的住房
- 女子的体形