刘林 李静 王欣

[摘? ? ? ? ? ?要]? 为提高学生对机电专业的学习兴趣,加深对自动控制相关概念的理解与应用掌握。设计平衡球滚动测试平台作为示教实例,为了方便教学,基于S7-1200 Siemens PLC 作为控制核心。此类示教实例旨在利用摆杆的角度倾斜,控制小球滚动的运动轨迹,涉及小球位置、速度及加速度等多种物理量的精确操控,同时也可结合小球运动过程中数学物理模型的建立,将自动控制中的定时、中断、循环扫描等方法巧妙地引入其中,达到较好的示教与实训效果。测试结果证明,该平衡球滚动示教平台可行性高,教学效果良好且节省了教学资源和成本。
[关? ? 键? ?词]? 平衡球滚动;示教平台;定时中断
[中图分类号]? G712? ? ? ? ? ? ? ? ? ?[文献标志码]? A? ? ? ? ? ? ? ? ? ? ? [文章编号]? 2096-0603(2019)21-0114-02
高等职业专科学生实践与创造能力的培养是以高职高专学生为主要对象,根本目的是最大限度地激发学生的积极性、主动性、创造性,潜移默化地提高学生动手能力,并让学生掌握独立面对与处理问题的办法,从而提升学生在生活中的实践创造力。
本文针对我系电子电气专业“高职创新实训”课程,设计并实现了一个平衡球滚动实训平台作为示教项目。通过该示教项目,教师可以将一个系统的高职高专创新实训项目的原理、操作等呈现给学生。此外,S7-1200为最新一代Siemens PLC,借此平台可提供较好的学习机会,丰富实训内容,培养学生对新型PLC的感性认知程度,增加教学过程的灵活性。
一、示教平台机械结构部分
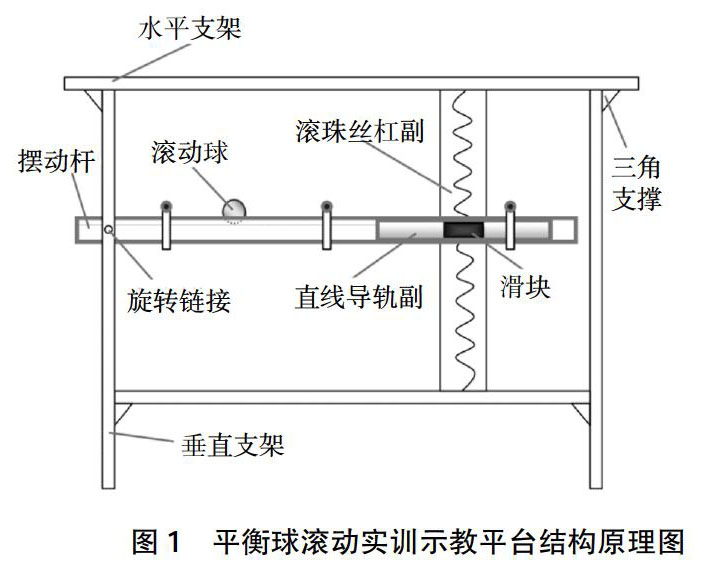
本文所采用的平衡球滚动控制示教系统装置,包括作为基础平台的平台架以及左端经横转轴转动铰链在平台架中的摆动杆和设置在该摆动杆上能沿摆动杆导向来回滚动的平衡球,摆动杆的右端为自由端,该摆动杆的右端设有直线导轨副;直线导轨副包括固定在摆动杆右端一侧面上的直线导轨和与该直线导轨滑动配合的导轨滑块;平台架中纵向安装有滚珠丝杠副,滚珠丝杠副包括受步进电机驱动的丝杠和与丝杠螺旋配合能沿丝杠上下移动的丝杠滑块,丝杠滑块与导轨滑块相连接,如图1所示。
摆动杆上间隔设有多个与S7-1200 PLC输入信号相连的平衡球位置传感器,平台架中安装有用于限定丝杠滑块移动最大上限的上限位置传感器和用于限定丝杠滑块移动最大下限的下限位置传感器,单片机依据平衡球位置传感器反馈的平衡球滚动位置信号以及上限位置传感器反馈的丝杠滑块的上限信号和下限位置传感器反馈的丝杠滑块的下限信号,经内部综合运算处理后电信号控制步进电机的旋转方向,该步进电机旋转驱动滚珠丝杠副利用直线导轨副带动摆动杆以横转轴为旋转轴心上下旋转调节摆动杆的倾斜角度,以控制平衡球的预定运动轨迹,实现平衡球在摆动杆上静止或做周期性往复滚动的精控示教。
二、示教平台硬件部分
S7-1200作为Siemens最新一代PLC的可编程控制核心,其卓越的性能致使设计与开发效率达到最优的效果。基于S7-1200的控制系统在最大限度上优化了整体的设计,且将项目开发成本控制到最好的结果。因此,本示教项目的滚动球示教平台采用以S7-1200 PLC为核心控制芯片。
平衡球滚动示教平台控制系统包括5个模块。(图2)
其中,电源模块,用于为示教平台供电; S7-1200 PLC,用于处理I/O交互信息,控制每个模块高效运行;霍尔接近开关模块,用来检测小球滚动运行过程中其所处的位置以及通过监测相邻两点之间的运动时间来推算当前运动速度;限位模块,用于控制摆杆的运动位置不过限位;步进电机驱动模块,用于驱动步进电机带动摆杆移动至相应的角度以控制小球以预定的速度运动到目的地位置。
三、示教平台软件及界面
(一)软件部分
本论文的平衡球滚动控制示教系统平台,可实现的示教功能及软件算法如下:
1.可实现摆动杆的水平定位,其主要实现方法是:首先通过PLC控制步进电机带动丝杠旋转,使摆动杆右端低速向下运动,当运动至下限位时即限定丝杠滑块移动的最大下限位,减速停止。而后步进电机反向快速运动,使摆动杆到达水平位置(位移量能经准确测量后给定);此时,将一小球即平衡球放在摆动杆上的任意位置,小球静止不动。
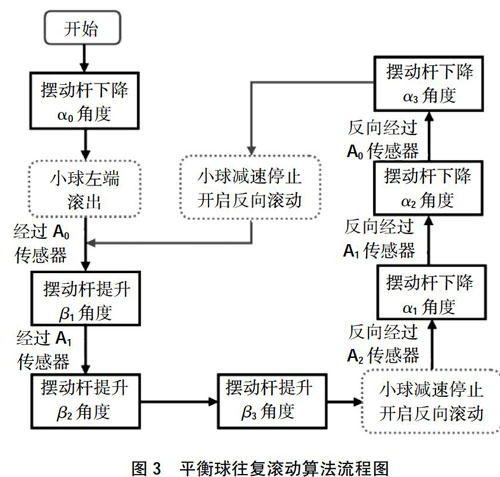
2.将小球放置摆动杆的最左端即左限位挡板限定的左端位置,通过控制摆杆倾斜一定的角度,使其滚动起来,经过平衡球位置传感器时,通过软件实时扫描可触发相应开关,并通过调整摆动杆的角度来控制小球的预定运动轨迹。最终可使小球在摆动杆上做周期性往复滚动,控制则由PLC控制实现。具体算法框图如图3所示:
3.通过测量摆动杆上任意连续两点间的小球滚动时间,可测量当前摆动杆的倾斜角度,此项可采用单片机中的定时中断结合外部中断的方式来实现,外部中断主要用于将平衡球位置传感器的信号输入控制系统内部,用于触发定时中断开启累计毫秒个数,直至小球滚动到下一检测点时即下一个平衡球位置传感器时,停止计数,所统计的时间可用于改变摆动杆的倾角,以控制小球的预定走位。其具体算法如图4所示。
(二)界面部分
本文根据高职学生实训教学平台的特点,在S7-1200上位触摸屏设计了平衡球示教监控系统平台。控制界面设定包含平衡球的运行速度,霍尔接近开关传感器用于检测小球滚动位置。Auto控制与Manual控制界面实现了触摸屏与平衡球系统之间的全双工通信。
四、结论
本文通过研制平衡球滚动实训示教平台,以实现一种利用示教结合实训的方法来进行“高职高专创新实训”课程的理实一体化教学方法。本示教实例是以平衡球滚动的示教机构为主体,让学生能够扎实学习并掌握以下关键知识点:
(1)PLC可编程控制器以及其数字模拟量系统的硬件设计方法;(2)PLC可编程控制器的定时、中断软件高阶编程方法;(3)PLC控制器与其他传感器或硬件的连接;(4)学习并掌握下位机(lower)与上位机(upper)之间通信方式;(5)触摸屏编程语言学习及组态软件设计方法。
参考文献:
[1]马树军,金铁铮.面向校内生产实习的电火花成型加工技术在线示教系统探索和研究[J].中国现代教育装备,2019(1):15-17.
[2]郝雯娟,任严伟.大学生创新课程实例:智能小车平台实现[J].电子电气教学学报,2018(1):129-133.
[3]张晓琪,王旭,尹天浩,等.科技创新智能实训平臺研制[J].试验技术与管理,2019(3):128-131.
- 如何将现代教育技术有效地融合到幼儿教育课堂
- 自然角活动中幼儿良好观察能力的培养
- 浅谈少年乒乓球运动员专项身体素质训练
- 高职院校“厂中校”运行模式的研究与实践
- 高分子材料燃烧合成技术探析
- 建筑制图与识图教学初探
- 高职会计电算化教学心得
- 河北高校英语专业多模态听力教材及教学方法探析
- 大学生考研焦虑与情绪调节策略研究
- 我国居民脂肪肝影响因素的研究进展
- 构建满足职业院校软硬结合的网络综合实验室
- 关于EFL教学中教师反馈研究的分析及相关实验设计
- 高职院校如何用心理学知识应对就业难题
- 新媒体背景下大学生时间管理有效途径探析
- 新时期高校教学改革与素质教育的相关思考
- 多元化评价,激发学生探究兴趣
- 创建生活力校园 建设新生活学校
- 例谈小学数学课堂教师提问存在的问题及其改进策略
- 农村寄宿制小学信息技术课教学的几点思考
- 让“裸备”助力小学语文教学
- 科学课程发展三思
- 妙用 Chant,增强趣味
- 规范数学语言 发展思辨能力
- 亲近生活 教学合一 妙笔生“花”
- 提核心问题,做大气的数学教师
- nondiscretionary
- nondiscriminating
- nondiscriminatingly
- nondiscriminations
- non-discursive
- nondiscursive
- nondiscursively
- nondiscursiveness
- nondiscursivenesses
- nondiscussible
- nondiseased
- nondisguised
- nondisintegrating
- nondisinterested
- non-disjunction
- non-disjunctional
- nondismemberment
- nondismemberments
- nondismissal
- nondismissals
- nondisparate
- nondisparately
- nondisparateness
- nondisparatenesses
- nondisparities
- 陶冶使之美好
- 陶冶使成就
- 陶冶化育
- 陶冶培养
- 陶冶心情
- 陶冶性情
- 陶冶性情的力量
- 陶冶性灵
- 陶冶情操,使心情舒畅
- 陶冶或煅炼人的环境
- 陶冶教化
- 陶冶教化世俗
- 陶冶百姓
- 陶冶练习
- 陶冶调治
- 陶冶身心,涵养德性
- 陶冶造就
- 陶冶造就人才
- 陶冶,培育
- 陶冶,造就
- 陶冶,锻炼
- 陶冶,陶铸
- 陶刀
- 陶制之砚
- 陶制的刀