栗辉 李擎 崔家瑞 王粉花

摘? 要:文章针对当前人工智能专业机器人实践教学的现状,围绕机器人相关课程,提出基于多种机器人实验平台的机器人实践教学课程建设,从而更好地满足人工智能专业机器人的实践教学需求和未来办学方向。
关键词:机器人技术;实践教学;模块化
中图分类号:G640 文献标志码:A? ? ? ? ?文章编号:2096-000X(2020)06-0041-03
Abstract: In view of the current situation of robot practice teaching in artificial intelligence specialty, this paper puts forward the course construction of robot practice teaching based on many kinds of robot experimental platform around robot related courses, thus better meet the needs of artificial intelligence professional robot practice teaching and future orientation.
Keywords: robotics; practical teaching; modularity
人工智能專业重点培养学生在智能认知和智能无人系统设计两方面的综合能力,为毕业生从事智能无人系统的研究、设计、开发和管理工作提供技能基础。2017年国务院发布了《新一代人工智能发展规划》,部署构筑我国人工智能发展的先发优势,加快建设创新型国家和世界科技强国。人工智能的快速发展对该专业学生的培养提出了更高层次的要求,尤其在实践与创新能力方面,要求学生除了掌握扎实的专业理论知识外,更需要系统的实践训练,而机器人相关技术作为人工智能专业重要的核心课程,其实践教学内容更需要不断更新和发展。本文主要围绕人工智能专业的实践教学需求和未来办学方向,研究探索机器人技术实践课程群的改革[1][2]。
一、建设背景及意义
学院原有机器人教学平台主要为DRRobot云台轮式机器人,但该型号机器人平台在实践教学中有较强的局限性,主要表现为程序封装性强,仅限于基于机器视觉的运动控制实验,功能单一、程序固化,通用性和开放度不够好,机器人基础原理部分无法通过实验体现,可开放实验较少,无法系统的为学生提供机器人技术相关课程的实验实践项目。因此,实验室引入了“探索者”模块化机器人平台及Nao人形机器人成熟化产品,在原有《机器人组成原理》实验课程的基础上,结合新版培养计划中《智能机器人》、《智能机器人应用设计》等新开设的课程,设计了层次明确、开放性强的机器人实验实践教学体系,实现了从机器人底层原理到上层应用的实践教学,保证知识的延续性并且逐层递进。
面向人工智能专业的机器人实践课程群体系的设计原则和思路主要包括以下几点:
(一)模块化教学
“探索者”模块化机器人平台包括连杆类、平板类和框架类等30多种零件,以及各类智能控制电子元器件,需要学生自己动手完成机器人从零开始的组装设计,能够激发学生的创作热情。平台模块化的设计丰富了实验内容,教师可以根据课堂理论教学内容,为学生准备丰富的实验教学主题,尤其在机器人基础原理部分,可以更直观详尽的进行模块化展示,夯实学生的理论基础[3]。
(二)层次化教学
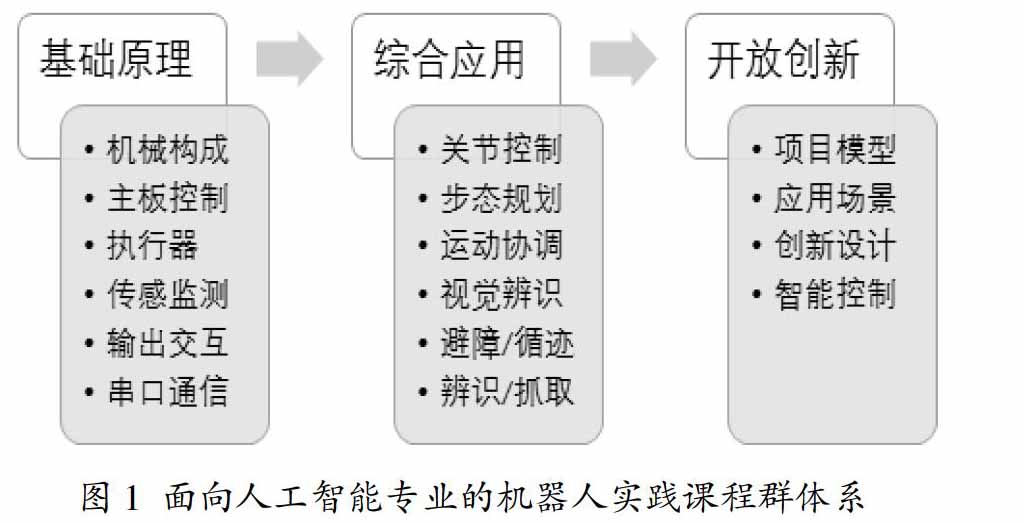
通过实践教学经验的积累,构建了体现层次化特征的三个阶段实践体系:基础原理、综合应用、开放创新,而三种不同的机器人实验平台,也使得这三个阶段既相对独立,又互相衔接,满足培养学生基础理论、实践能力、创新能力和工程素质的需求。
(三)开放性教学
“探索者”模块化机器人平台适合让学生自己动手设计各式结构的机器人模型,各机器人构件具备通用性、重构性,构件之间具有统一的接口,可根据用途进行组合,得到所需的机器人构型及功能[3]。实验过程中给出的实验项目设计均为引导性、参考性实验,学生均需要自行选取元器件进行组装和编程,该平台满足了从机器人基础原理到综合应用各个层次的开放性实验,将实验主导权更多的交予学生手中。
此外,在开放创新实验中,DRRobot云台轮式机器人和Nao人形机器人等更为成熟的机器人产品也为学生提供了更多的选择,适合实际应用背景的创新项目研发。
二、机器人技术实践教学
面向人工智能专业的机器人实践课程群主要分为三个层次,所设计的机器人实验项目通过循序渐进的三个阶段课程结合在机器人实验平台的实践操作,让学生能够轻松入门,并在具备相应基础后进一步获得创新实践能力的提高。
(一)机器人组成原理基础实验
第一层次是机器人技术的基础阶段,开设课程有《机器人组成原理》,使用的硬件设备主要为“探索者”模块化机器人平台,其教学目标是了解机器人技术,实验内容主要包括机器人零件构成、主控及编程、执行器、检测与交互、通信等基础内容。
(二)智能机器人综合应用实验
第二层次是应用阶段,开设课程有《智能机器人》,使用的硬件设备包括“探索者”模块化机器人平台及DRRobot云台轮式机器人,其教学目标是通过深入学习单片机控制器、舵机、传感器的内部原理、使用方式,以项目的方式设计实验内容,配合特定的电子模块以及应用场景,达到巩固知识、锻炼实践能力的目的。实验中需要学生自行选择主控版、舵机执行器、传感器等零件模块,完成机械组装,最终编写相应的执行程序来实现。主要内容有扫地机器人、机械臂抓取、循迹小车、机器人运动及步态规划、基于视觉的机器人运动控制实验、基于颜色分拣机械臂的设计与实现等综合设计性实验。
(三)智能机器人开放创新实验
第三层次是开放创新阶段,开设有实践课程《智能机器人应用设计》,同时适用于科技创新、科技竞赛、毕业设计等教学实践环节,使用的硬件设备包括“探索者”模块化机器人平臺、DRrobot云台轮式机器人、Nao人形机器人等所有机器人设备,其教学目标为通过复杂完整的项目锻炼学生的综合实践能力,该部分实验内容为开放性选题,鼓励学生自选主题、自选设备、自行设计实现。教学过程采用CDIO的项目式教学开展,培养学生的工程技术水平和实践素养。
三、应用效果
案例1 课程设计实例
在智能机器人应用设计、智能专业生产实践等课程中,学生运用“探索者”模块化机器人平台自行设计组装并编程实现的机器人模型。如图2,图3。
案例2 科技创新实例
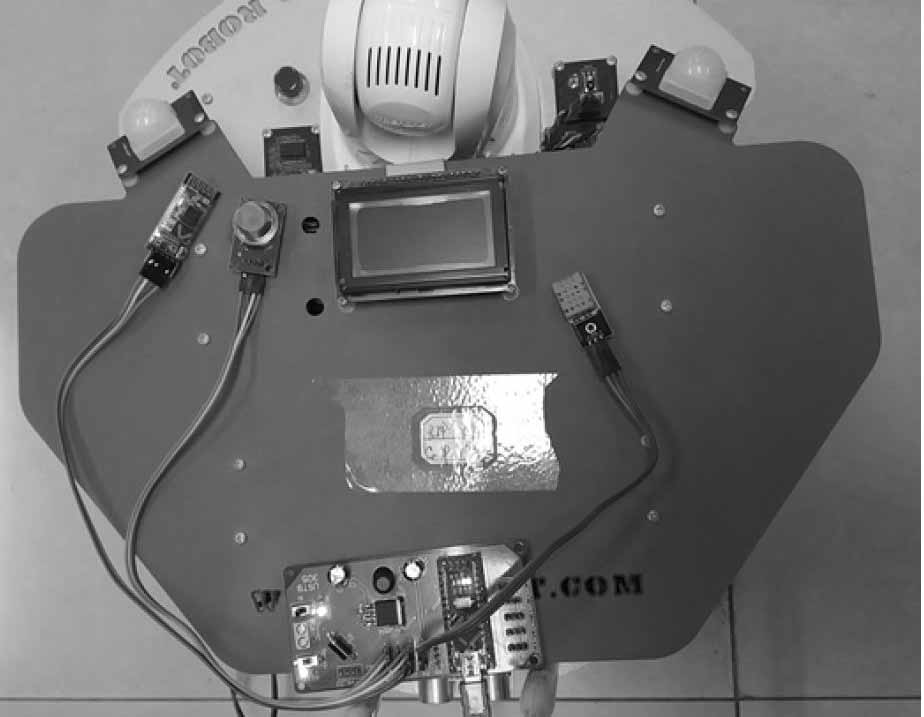
该科技创新项目以DRrobot云台轮式机器人为基础,研发一款针对矿井、地下未知空间和管道等空间的智能探测机器人,实现了半自动移动、自动避障、人脸人体识别进行跟随,并添加Stm32单片机开发板、DHT11温湿度传感器、MQ135有害气体检测传感器,实现了单片机将采集的温湿度气体浓度通过ZIGBEE_E30模块无线射频传输至上位机监测。如图4。
案例3 毕业设计实例
该毕业设计“基于Nao机器人的目标识别和行为设计”,基于Nao机器人,设计一种控制算法,实现机器人自主搜寻、识别与定位目标物体,运用机器人运动学原理规划行走路径,并调动机器人手臂实现对目标物体的抓取,以实现为人们提供智能化服务的目的。如图5,图6。
四、结束语
本文通过对人工智能专业机器人实践教学的改革探索,提出了模块化、层次化、开放性的机器人实践课程群建设。在教学过程中,学生能够基于模块化技术了解机器人组成原理,能够自主性设计机器人应用主题,并且结合科技创新、科技竞赛提高学生自主创新能力和团队协作精神,学生根据课程体系由浅入深的完成了机器人工程综合应用能力的系统性实践训练,达到提高人工智能专业学生的实践创新能力的目的,从而适应新兴技术的发展和未来社会技能型人才的需求。
参考文献:
[1]许超,单晶,宋飞,等.模块化机器人平台的创新实验设计与实现[J].辽宁大学学报(自然科学版),2018,45(02):129-132.
[2]朱海荣,吴瑜.基于工程教育专业认证的机器人创新实验平台开发[J].实验技术与管理,2018,35(11):32-37.
[3]王滨生,刘辉,刘佳男,等.模块化机器人创新教学与实践[M].哈尔滨工业大学出版社,2016.
- 高职院校建筑工程类专业特色办学模式研究
- 高职院校提升学生质量要解决的几个突出问题
- 浅谈高职高专医学类院校开设《物理学》课程的重要性
- 关于信息化对职业教育管理发展推动的探讨
- 论高职院校图书馆开展人文素质教育的有效途径
- “以赛促教、以赛促学”
- 高职培训实效性研究
- 高职数字出版专业人才培养模式探索与实践
- 高职汽车运用技术专业设置与人才培养目标探讨
- 高职英语教学中文化导入的模式研究
- 高职院校教学资源网站建设现状与建设思路
- 浅谈高职学生能力的培养
- 试论英语写作大赛对高职院校公共英语写作教学的影响
- 国内外高职院校课程体系的比较及启示
- 体育教学中的交流活动刍议
- 浅析篮球游戏在篮球教学中应用的作用及教学要求
- 对优化高校体育教学模式的全面思考
- 多元立体式舞蹈教学对幼师生发展价值的探讨
- 浅论传统教育图书出版的数字化转型
- 浅议高校学生干部管理
- 重新审视高校教学秘书在教学管理中的角色和作用
- 南宁市生源地信用助学贷款学生信用状况分析及对策
- 简谈高校党务工作的虚实
- 基于企业识别的酒店管理专业文化建设研究
- 高校学生管理法治化中的常见问题及其对策研究
- meanstested
- means-ˌtested
- means-ˌtesting
- meant
- meantime
- meantimes
- mean to
- mean to do sth
- mean well
- mean-well
- meanwhile
- meanwhiles
- mean²
- mean³
- mean¹
- measles
- measleses
- measlier
- measliest
- measly
- measurabilities
- measurability
- measurability, measurableness
- measurable
- measurablenesses
- 贪夫
- 贪夫徇利
- 贪夫徇财
- 贪夫徇财,烈士徇名
- 贪夫殉利
- 贪夫殉财
- 贪夺
- 贪奢
- 贪如虎狼
- 贪如饕餮
- 贪婪
- 贪婪且不满足
- 贪婪且有秽行
- 贪婪之心
- 贪婪之甚
- 贪婪争竞
- 贪婪侵夺
- 贪婪傲慢
- 贪婪冥顽
- 贪婪凶恶
- 贪婪凶恶的人
- 贪婪凶暴
- 贪婪凶横
- 贪婪凶残
- 贪婪凶残的人