霍彦希 张诚诚 董振宇 陈伟 张志捷
摘 要 为了解决快递行业“最后一公里”耗时耗力难题,文章介绍了一种基于单目视觉SLAM的无人快递车的设计方案,以OpenCR为控制核心,以无线WiFi技术为信息收发媒介,以单目SLAM技术为同时定位与地图构建基础,利用移动机器人导航技术,使无人快递车与快递员和收件人友好交互,完成路径规划并自主导航寄送快递,实现高效便捷寄收快递,具有成本低廉、操作简单、简洁高效等特点。
关键词 同时定位与地图构建;移动机器人导航;路径规划
中图分类号 TP3 文献标识码 A 文章编号 1674-6708(2019)232-0117-02
一种基于单目SLAM的无人快递车能自主导航,将快递员投递到快递柜的物品送至目的地,并在沿途能主动避障并重新规划,这样就大大提高了快递员的效率,也给收件人提供了便利。
1 无人快递车设计方案
根据功能需求,需要设计服务端模块,人机交互模块,构图和导航模块,底层运动控制模块。对于PC及移动终端,其与OpenCR开发板和服务端选择使用无线通信。OpenCR开发板与传感器和里程计模块选择对应的USB接口或者串口。无人快递车可完成以下功能:快递员与无人快递车进行交互,将快递寄存在无人快递车的快递柜中,无人快递车根据物流信息从服务端获取收件人地址,自动导航至目的地址附近,将开柜二维码加密后发送至收件人手机App并发送验收提醒。收件人凭借二维码开柜提取货物确认签收。使用分模块设计,将敏感信息存储在服务端,使敏感信息泄露可能性降低,简化了快递员操作流程,保护了收件人的隐私。
2 构图和导航模块
2.1 地图构建模块
快递员在首次使用无人快递车前操控无人快递车在工作区域进行地图构建。无人快递车在构图过程中启动激光雷达扫描外部环境,标记行驶过程中的障碍物体,将地图保存在内存中。
基本工作原理为,激光扫描模块利用Gmapping算法中使用的一种高效的Rao-Blackwellized粒子滤波将收取到的激光测距数据最终转换为栅格地图。粒子滤波要经历初始化、转移、决策、重采样、滤波、地图生成6个阶段。
在构图过程中采用激光雷达进行闭环检测。因为道路场景比较复杂,因此地图构建过程中选择车流量较少的时候进行地图构建,减少干扰因素,提高激光扫描匹配的成功率和准确度。匹配算法采用Olson算法。SLAM构建的静态环境地图将作为无人快递车路径规划和导航过程中的静态基准地图。无人快递车在导航过程将根据传感器数据在静态基准地图的基础上不断更新动态地图。如果遇到道路堵塞时将暂时更新静态的地图并覆盖原先的静态基准地图。
2.2 导航与避障模块
无人快递车根据激光雷达构建的静态地图作为路径规划的基础。根据从服务端获取的当前收件人地址,无人快递车将其标记在静态地图中,采用ROS中的Gmapping算法生成最佳导航路径,并沿此路径寄送快递。在导航过程中启用激光雷达不断更新地图,当遇到移动速度较快的动态物体时,无人快递车根据单目相机多次扫描的结果预判是否有可能与其相撞。无人快递车根据运动物体的运动轨迹重新规划当前导航路径进行主动避让,同时不断测试当前物体的运动轨迹,一旦无法避让,则立即停止直到运动物体原理冲突路径后再启动导航模块。
当无人快递车检测到道路阻塞之后,无人快递车将利用传感器传回的数据更新局部地图,然后在更新后的地图的基础上重新规划一条可行路径。当所有路径均不可行时,无人快递车将退出此次导航,选择下一收货人地址进行配送。
2.3 里程计模块
无人快递车的里程计基于OpenCV中特征点的提取和匹配。采用SIFT特征点算法,使用组和层的结构在尺度空间上构建高斯差分金字塔;然后探索上一步建立的高斯尺度空间;通过高斯差分来识别潜在的对尺度和旋转不变的特征点进而实现极值检测及特征点的定位;基于图像局部的梯度方向,分配给每个关键点位置一个或多个方向对特征方向进行赋值。通过上述步骤找到的SIFT特征点的位置、方向、尺度信息,最后使用一组向量来描述特征点及其周围邻域像素的信息最终生成特征描述子。特征点的匹配分为3个步骤:提取图像中的關键点,根据得到的关键点的位置计算特征点的描述子,根据特征点的描述子进行匹配。
3 软件程序设计
3.1 寄送模块
快递员将货物寄存在无人快递车的快递柜时,无人快递车把快递柜门的编号发送到服务端,服务端生成一个二维码发送到收件人的手机App,并把二维码和对应快递柜门的编号的对应关系存储起来,快递员将所有的货物寄存结束后设定无人快递车开始寄送快递。
本模块设计采用C++语言编写,在main()函数中初始化变量。然后进入等待while(true)循环,依次经过等待输入指令函数、确认货物入柜函数、生成二维码并发送提醒函数。这个三函数在while(true)中循环,当快递员完成投递并输入开始工作指令后,无人快递车将开始进入自动导航寄送状态。无人快递车提取当前所送货物的目的地址并在静态地图上标注,自动规划当前位置到目的地址的最佳路径并启动自动导航,在寄送过程中通过激光距离传感器模块和视觉传感器模块不断更新地图并优化导航路径。
3.2 送达提示模块
车辆每隔1秒检测自身的位置,当检测到目的地与自身位置的距离小于预先设定的阈值时,执行送达提示函数,无人快递车给收件人发送二维码和验收提醒消息,收件人凭借二维码打开相应的快递柜,提取货物并关闭快递柜完成取货操作。无人快递车开始自主导航至下一收件人地址,直到所有快递寄送完成后返回快递员预先指定地址。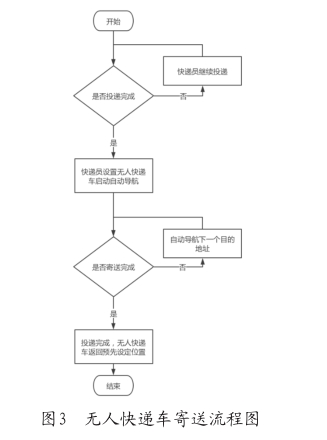
本模块包括定位查询函数和验收提醒函数。在寄送状态中定位查询函数负责查询当前位置与目标位置的距离是否小于设定阈值,当检测到当前位置与目标位置的距离小于设定阈值时,验收提醒函数利用无人快递车中内置的无线网络向服务端验收提醒函数API接口发送请求,服务端将验收消息推送到对应收件人手机App中。收件人凭自己手机上的二维码在无人快递车的二维码扫描仪前扫描,无人快递车根据二维码的信息向服务端发送请求获取对应快递柜门的编号打开对应的快递柜门,收件人完成取货后无人快递车将对未送的快递进行排序,选择距离当前位置最近的收件人地址进行派送,并开始重新规划路径。
参考文献
[1]邓明华,陈云红,王晶晶.基于单目视觉的移动机器人SLAM系统构建[J].南方农机,2019(1):20-21.
[2]邹谦.基于图优化SLAM的移动机器人导航方法研究[D].哈尔滨:哈尔滨工业大学,2017.
[3]杨雪梦,姚敏茹,曹凯.移动机器人SLAM关键问题和解决方法综述[J].计算机系统应用,2018,27(7):1-10.
[4]杨芳.基于OpenCV的双目视觉系统目标定位与测距方法研究[D].银川:宁夏大学,2018.
- 我国中学生价值观的培育 受消费主义的影响研究
- 浅谈农村义务教育政策落实的现状与对策
- 居家养老模式与高龄老人健康研究
- 财税视角下农村公共产品供给的影响因素与机制创新
- 对于跨越卡夫丁峡谷理论的再认识
- 浅谈价格认定机制对 放开价格行为的引导和规范
- “家居+餐饮”模式下顾客体验与品牌忠诚构成要素的关系研究
- 基于地基激光雷达的建筑物三维建模
- “一带一路”与马歇尔计划的比较研究
- 成都市PPP模式发展现状及对策研究
- 江苏省农民移动信息服务 需求演变研究
- 现代人才发展治理体系的内涵、 框架及构建策略研究
- 供给侧改革背景下共享经济商业模式研究
- 云南省软件业发展态势与对策分析
- 关于设备制造企业成本管理的几点分析
- 建筑安装施工企业降低工程成本的方法探讨
- 基于业财融合视角下的电力建安业工程预算管理研究
- 事业单位全面预算管理问题研究
- 行政事业单位固定资产内部控制研究
- 大数据时代城市突发事件政府应急管理创新
- 浅谈行政事业单位内部控制存在的问题及对策
- 浅析现代企业内部审计体系建设
- 大数据背景下政府信息公开面临的挑战和机遇
- 浅析事业单位国有资产管理
- 企业发展各阶段的预算管理
- nonostentation
- nonostentations
- nonoverhead
- nonoverheads
- nonoverlapping
- nonoverlappings
- nonowner
- nonowners
- nonowning
- nonoxidizable
- nonoxidizing
- non-oxidizing
- nonoxygenated
- nonpacifiable
- nonpacifist
- nonpacifists
- nonpagan
- nonpaganish
- nonpagans
- nonpaid
- nonpalatabilities
- nonpalatability
- nonpalatable
- nonpalatableness
- nonpalatablenesses
- 议论不一
- 议论严正刚直
- 议论中所持的观点以及支持这一观点的理由
- 议论为政之道
- 议论之士
- 议论云兴
- 议论他人是非
- 议论价格
- 议论军事
- 议论协调
- 议论和进谏
- 议论国事兴革
- 议论型导语
- 议论多
- 议论大道
- 议论宫廷内部事务的嫌疑
- 议论广泛而细微
- 议论式悼词
- 议论很多,纷扰不宁
- 议论性散文
- 议论或吵闹声
- 议论指摘
- 议论指斥
- 议论政事
- 议论文