刘彪 肖宏儒 宋志禹

摘要:果园施肥是果园种植中的一个重要作业环节,现有的果园施肥机械大多都是针对颗粒肥的,只有部分施肥机械可以施有机肥,但施肥深度达不到要求或需要人工覆土,劳动量大。针对这种情况,研究一种果园有机肥旋切变深施肥机;介绍该施肥机的机械组成、工作原理并分析旋切施肥部件作业时的力学性能,建立相关力学方程,进行定性分析;确定前进速度、刀轴转速、施肥深度为主要影响因素,并对其进行试验和优化,得出因素水平的最优参数组合,即前进速度为0.1 m/s、刀轴转速为250 r/min、施肥深度为20 cm,此时功率为1.75 kW,土壤和肥料混合均匀性差异系数为20.31%,碎土率为81.36%。结果仅对果园有机肥旋切变深施肥机作业提供参考。
关键词:果园机械;旋切施肥;力学性能;试验分析;优化
中图分类号: S224.2 文献标志码: A 文章编号:1002-1302(2019)01-0230-07
随着生活水平的提高,人们对水果的需求也越来越大。我国果园种植面积也在不断增加,目前已成为世界上果园种植面积最大的国家。果园施肥技术是影响水果品质和产量的重要因素之一[1]。目前我国的果园施肥机械类型主要有果园开沟施肥机和果园挖穴施肥机,这2种类型的果园施肥机主要是针对颗粒肥的,不适用有机肥(如厩肥等)的机械化施肥。同时,根据果园施肥的深度要求,施肥深度应该位于 20~40 cm范围内且深度越高一般肥料的利用率越高[2-5]。施肥深度过低不利于肥料的吸收利用,施肥深度过高也会造成肥料的利用率低,达不到经济作物种植的要求。现有的集施肥、覆土于一体的果园施肥机施肥深度达不到 40 cm,满足不了果园施肥深度的要求,降低了肥料的利用率。为了提高肥料的利用率,增加果树的产量和质量以及机械化施有机肥(如厩肥等)的果园施肥机械,本研究设计了一种果园有机肥旋切变深施肥机,分析了旋切变深施肥机力学特性,并进行试验。
1 有机肥旋切变深施肥机设计
1.1 有机肥旋切变深施肥机整体设计
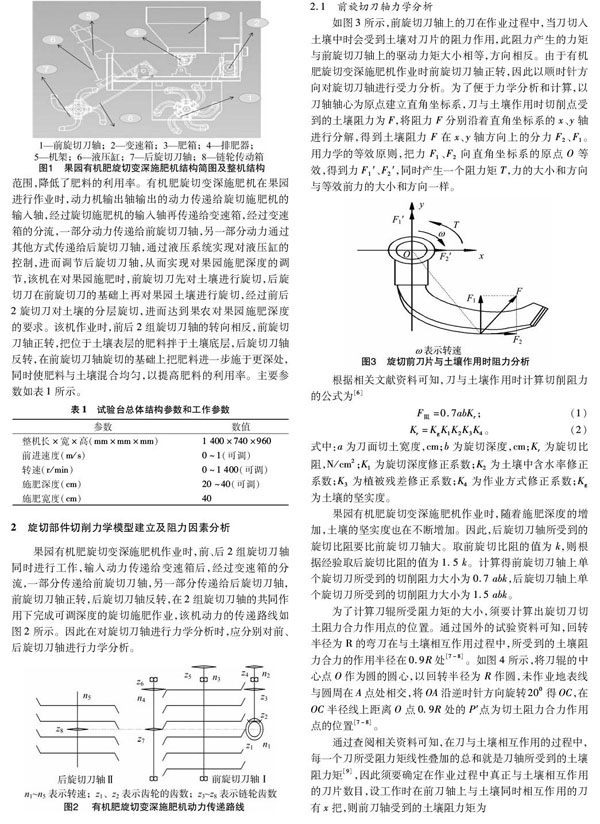
如图1所示,有机肥旋切变深施肥机主要由机架、液压缸、前旋切机构、后旋切机构、链轮传动箱、施肥部件以及变速箱等部分组成。输入动力传给变速箱后,经过变速箱的分流,一部分传递给前旋切刀轴,另一部分传递给后输入轴,后输入轴与链轮传动箱前端相连,链轮传动箱后端与后旋切刀轴相连,液压缸通过铰链固定在机架和链轮传动箱上,旋切机构通过液压缸的调节作用来控制后旋切刀轴,实现对果园施肥深度的调节。
1.2 整机工作原理
传统的果园施肥机械主要为开沟施肥机,施肥方式一般为开沟-施肥-覆土,而开沟施肥机主要存在的缺点为所施肥料种类大多为颗粒肥,不能进行联合作业,施入土壤后的肥料主要位于所开沟槽的底部,不能布满所开沟槽的整个空间范围,降低了肥料的利用率。有机肥旋切变深施肥机在果园进行作业时,动力机输出轴输出的动力传递给旋切施肥机的输入轴,经过旋切施肥机的输入轴再传递给变速箱,经过变速箱的分流,一部分动力传递给前旋切刀轴,另一部分动力通过其他方式传递给后旋切刀轴,通过液压系统实现对液压缸的控制,进而调节后旋切刀轴,从而实现对果园施肥深度的调节,该机在对果园施肥时,前旋切刀先对土壤进行旋切,后旋切刀在前旋切刀的基础上再对果园土壤进行旋切,经过前后2旋切刀对土壤的分层旋切,进而达到果农对果园施肥深度的要求。该机作业时,前后2组旋切刀轴的转向相反,前旋切刀轴正转,把位于土壤表层的肥料拌于土壤底层,后旋切刀轴反转,在前旋切刀轴旋切的基础上把肥料进一步施于更深处,同时使肥料与土壤混合均匀,以提高肥料的利用率。主要参数如表1所示。
2 旋切部件切削力学模型建立及阻力因素分析
果园有机肥旋切变深施肥机作业时,前、后2组旋切刀轴同时进行工作,输入动力传递给变速箱后,经过变速箱的分流,一部分传递给前旋切刀轴,另一部分传递给后旋切刀轴,前旋切刀轴正转,后旋切刀轴反转,在2组旋切刀轴的共同作用下完成可调深度的旋切施肥作业,该机动力的传递路线如图2所示。因此在对旋切刀轴进行力学分析时,应分别对前、后旋切刀轴进行力学分析。
2.1 前旋切刀轴力学分析
如图3所示,前旋切刀轴上的刀在作业过程中,当刀切入土壤中时会受到土壤对刀片的阻力作用,此阻力产生的力矩与前旋切刀轴上的驱动力矩大小相等,方向相反。由于有机肥旋切变深施肥机作业时前旋切刀轴正转,因此以顺时针方向对旋切刀轴进行受力分析。为了便于力学分析和计算,以刀轴轴心为原点建立直角坐标系,刀与土壤作用时切削点受到的土壤阻力为F,将阻力F分别沿着直角坐标系的x、y轴进行分解,得到土壤阻力F在x、y轴方向上的分力F2、F1。用力学的等效原则,把力F1、F2向直角坐标系的原点O等效,得到力F1′、F2′,同时产生一个阻力矩T,力的大小和方向与等效前力的大小和方向一样。
2.3 旋切部件阻力因素分析
通过“2.1”“2.2”节的分析可知,果园有机肥旋切变深施肥机作业时,施肥深度、刀片数量、传动比以及土壤特性等情况都会影响土壤阻力的大小。果园有机肥旋切变深施肥机作业时,前、后2组旋切施肥部件同时进行旋切施肥作业,机器工作过程中遇到的阻力主要为刀片与土壤相互作用过程中产生的土壤阻力。该机与传统的果园施肥机械相比有以下优点:(1)在施肥深度和宽度相同的情况下,由于该机采用前、后2组刀轴在不同施肥深度范围内共同作业,從而避免了因施肥深度增加而土壤阻力急剧增大的情况。(2)该机前、后2组旋切施肥部件转向相反,作业时前旋切刀轴正转,把位于土壤表层的肥料拌于土壤底层,后旋切刀轴反转,在前旋切刀轴旋切的基础上把肥料进一步施于更深处,同时使肥料与土壤混合均匀,可提高肥料的利用率。(3)该机作业时可以根据需要对施肥深度进行调节,最大施肥深度可达40 cm。
3 主要部件设计
3.1 旋切刀轴
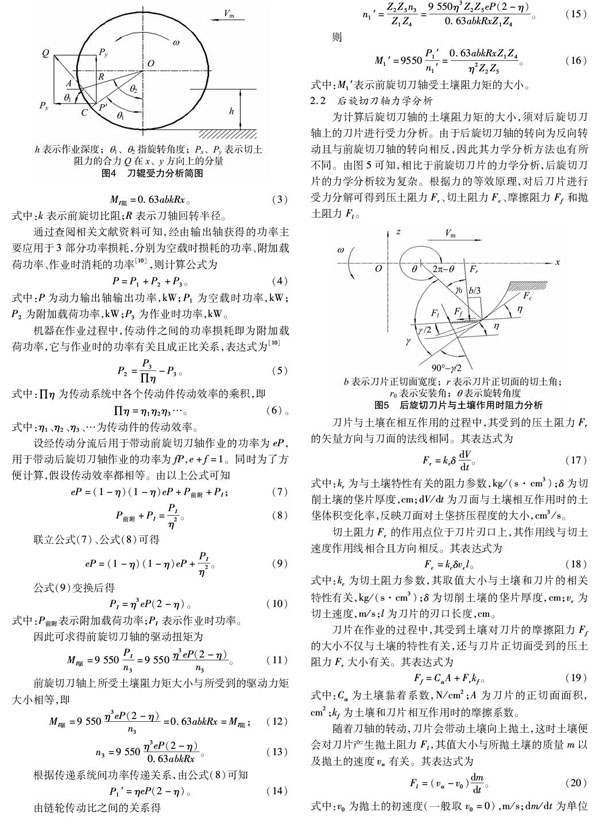
果园旋切施肥机在进行作业时,前、后2组旋切刀轴同时工作,旋切刀轴所受的力是旋切刀所受力的合成。旋切刀轴有实心和空心2种形式,在实际应用中常选用空心刀轴,因此本研究旋切刀的刀轴采用空心形式。前旋切刀轴的动力通过变速箱的输出动力得到,通过轴承固定在机架上,完成对浅层土壤的旋切作业。后旋切刀轴的动力通过链轮传动箱中的链轮获得,并将其通过轴承与链轮传动箱相连,完成对深层土壤的旋切作业。在前、后2组旋切刀轴的共同作用下,完成对果树的施肥。
3.2 液压调节机构
在对果园施肥时,由于后旋切刀轴的旋切深度可调,因此对后旋切刀轴采用液压缸进行旋切深度调控。选择符合要求的液压缸,将其一端通过铰链固定在机架上,另一端通过铰链与链轮箱相连。液压缸的液压油路与拖拉机的液压系统进行连接,工作时,通过调节拖拉机的液压系统来控制后旋切刀轴的旋切施肥深度。
4 试验与分析
4.1 试验设备
由于在田间作业时不易于测量刀轴转速和功率等相关试验参数,因此本试验于江苏大学土壤试验台进行。如图6所示,该土槽长度为17 m,宽度为2 m,土槽内的土壤从果园中获取。试验前对土槽内土壤进行整理:(1)每次试验前都要翻土,敲碎板结的土块,均匀适量洒水;(2)将土壤进行分层压实;(3)洒水、压实后的土壤放置约1 d,使土壤中水分均匀渗透。试验时测得土壤的平均含水率约为24%。依据GB/T 20346.1—2006《施肥机械 试验方法》、GB/T 5262—2008《农业机械试验条件 测定方法的一般规定》等相关国家标准和JB/T 9803.2—1999《耕整机 试验方法》的规定,对功率、土壤和肥料混合的均匀性差异系数、碎土率等试验指标进行测定。
4.2 试验指标及其测试方法
4.2.1 功率 本试验通过安装的传感器来测量相应的转速和扭矩,再根据功率与转速和扭矩之间的关系式间接测出所需功率的大小。功率计算公式为P=T×n9 550。
4.3.1 数据处理 该试验采用SAS 9.4软件对数据进行处理。
4.3.2 试验结果极差分析 由表3可知,以功率作为试验指标时,各试验因素水平的较优组合为A1B3C1,各因素作用的影响顺序为前进速度>施肥深度>刀轴转速;以土壤和肥料的混合均匀性变异系数作为试验指标时,各试验因素水平的较优组合为A1B3C3,各因素作用的影响顺序为以前进速度>刀轴转速>施肥深度;以碎土率作为试验指标时,各试验因素水平的较优组合为A1B3C3,各因素作用的影响顺序为以前进速度>刀轴转速>施肥深度。
5 讨论
果园的施肥方式主要有开沟施肥和挖穴施肥,即由施肥机进行开沟和挖穴,人工在所开的沟槽或穴内进行施肥,然后再由人工进行埋土,加大了劳动强度以及人工成本。虽然也有部分施肥机可以对果园机械化施肥,但大多是针对颗粒肥的机械化施肥,不能施像厩肥这样的有机肥。本试验设计的果园有机肥旋切变深施肥机不仅可以进行机械化施肥,也可以对果园进行厩肥的机械化施肥。该机在试验时仅考虑了前进速度、刀轴转速、施肥深度对指标影响的大小,并没有考虑土壤平整度以及土壤类型对指标的影响情况。因此,本试验的研究结论仅在特定的土壤含水率、土壤平整度以及坚实度条件下适用,对于其他土壤特征形式仍需要更加深入的研究和分析。
6 结论
分析了果园有机肥旋切变深施肥机作业时的力学性能,根据作用力与反作用力的关系建立了驱动力与土壤阻力之间的关系,并建立了驱动力矩与阻力矩的力学方程,找出了在作业过程中影响土壤阻力大小的相关因素。
果园有机肥旋切变深施肥机集旋切-施肥-覆土于一体,降低了果农的劳动强度,改变了传统果园的施肥方式;同时,不仅施肥量可以根据果园的需求进行调节,施肥深度也可根据需求进行调节且最大施肥深度可达40 cm。
根据试验结果可知,在施肥作业的过程中影响综合指标的因素按照试验分析的结果排序为前进速度>刀轴转速>施肥深度,相关因素各水平的最优参数组合为A1B3C1,即前进速度为0.1 m/s,刀轴转速为250 r/min,施肥深度为20 cm,此时功率为1.75 kW,土壤和肥料混合均匀性变异系数为20.31%,碎土率为81.36%。
参考文献:
[1]李建剛,侯宗海,董元华. 丰县果树施肥的现状、存在问题及建议[J]. 江西农业学报,2014,26(11):79-81,86.
[2]平吉成,陈 宇. 宁夏引黄灌区果园施肥针对性和施肥深度问题调查分析[J]. 北方园艺,2000(2):28-29.
[3]郭文龙,郭俊炜,党菊香. 基于果园土壤肥力评价和测土施肥的土样采集适宜深度的研究[J]. 陕西农业科学,2007(4):63-64.
[4]刘 彪,肖宏儒,宋志禹,等. 果园施肥机械现状及发展趋势[J]. 农机化研究,2017,39(11):263-268.
[5]赵 娜,刘全清,陈延军,等. 曲周县苹果园施肥现状及评价[J]. 黑龙江农业科学,2013(1):41-42.
[6]奚小波,缪 宏,赵 荔,等. 大耕深旋耕刀激光冲击强化残余应力研究[J]. 高压物理学报,2015,29(1):52-58.
[7]赵亚祥. 旋耕机的结构及运动参数对其作业性能的影响研究[D]. 长春:吉林农业大学,2015.
[8]张孝安. 农业机械设计手册[M]. 北京:中国农业科学技术出版社,2007:237.
[9]王建定,桑正中,陈翠英,等. 卧式旋耕机刀轴扭矩及其波形推断[J]. 江苏工学院学报,1986,7(3):63-70.
[10]贺小伟. 高茬秸秆旋耕翻埋功耗检测系统设计与试验研究[D]. 武汉:华中农业大学,2014.
[11]吴建民,陶菊春. 用综合加权评分法优化钻井泥浆配方的研究[J]. 农业工程学报,2002,18(2):45-48.
[12]方延旭,杨培岭,宋素兰,等. 灌区生态系统健康二级模糊综合评价模型及其应用[J]. 农业工程学报,2011,27(11):199-205.
[13]于昭洋,胡志超,王海鸥,等. 大蒜果秧分离试验装置的设计与测试[J]. 农业工程学报,2013,29(16):7-15.
[14]麻芳兰,何玉林,李尚平,等. 甘蔗收获机切割性能的模糊综合评价与优化[J]. 农业机械学报,2006,37(12):79-82.
[15]吴德林,周云飞. 高速铣削切削参数的模糊正交优化方法[J]. 机械工程师,2008(8):91-93.
[16]张国凤,胡群威. 基于满意度原理的旋转式分插机构多目标优化设计[J]. 农业工程学报,2012,28(9):22-28.
[17]陈 魁. 试验设计与分析[M]. 北京:清华大学出版社,2005:72-128.
[18]高化猛,陶辰立,石 磊. SAS环境的正交试验数据分析与检验[J]. 军械工程学院学报,2015,27(6):4-7.
[19]翁何霞,张庆远. 在正交试验设计中SAS编程处理的应用[J]. 中国医院药学杂志,2008,28(4):326-327.
[20]李成松,高振江,坎 杂,等. 酿酒葡萄果-蒂振动分离试验[J]. 农业工程学报,2015,31(9):39-44.曹燕篆,王小娟,袁旭峰,等. 利用废纸产纤维素酶复合菌系的筛选及性质研究[J]. 江苏农业科学,2019,47(1):237-241.
- 某型发动机低压一级涡轮盘榫头接触应力计算分析
- 汽动给水泵转动部件卡涩原因分析及防范措施
- 海上模块钻机人机工程设计改进探讨
- 锯切参数对圆锯片消音的影响及优化
- 汽车前端模块注塑模具设计要点
- 3号机组疏水系统优化
- 离心泵的故障分析
- 基于运行实践的调度工作评价体系应用探索
- 游梁式抽油机曲柄销轴故障诊断与解决对策
- 高矿压深井工作面卸压强度在降低工作面冲击危险性中的作用与研究
- 真空泵板式换热器冷却水改造
- 既有线开行重载列车的条件与对策
- 新冠疫情下食品安全检测的重要性
- 影响螺杆钻使用原因分析及对策
- 探讨配电网自动化供电可靠性的影响因素
- 浅析茶叶机械的维护
- a-乙酰乳酸脱羧酶(ALDC)对酿酒中双乙酰控制效果研究
- 饰用金属材料工艺及其发展对策
- 分布式光伏电站建设成本及收益分析
- 煤粉锅炉降低飞灰可燃物的研究
- 新能源汽车需求与库存量预测
- 浅谈锅炉风机的安装要点
- 智能乒乓球发球机控制系统
- 液压式法兰开度器
- 碳纤维汽车前地板DV测试对其变形影响研究
- noncausable
- noncausal
- non-caustic
- noncaustic
- noncaustically
- noncelebration
- noncelebrations
- noncelebrities
- noncelebrity
- non-celebrity
- noncelestial
- noncelestially
- noncelibate
- non-celtic
- noncensored
- noncentral
- noncereal
- noncereals
- noncerebral
- nonceremonial
- nonceremonially
- noncertainties
- noncertainty
- noncertificated
- noncertified
- 酒在肚时,事在心里
- 酒在肚里,事在心头
- 酒在肚里, 事在心头。
- 酒地花天
- 酒地花天不知老
- 酒场
- 酒场酒铺
- 酒坊酒馆
- 酒坐
- 酒坛
- 酒坛破了大家断饮,饭碗破了一人断食
- 酒坛诗社
- 酒垆
- 酒垆记黄
- 酒士
- 酒壶
- 酒壶的美称
- 酒壶虽小胜大海,淹死多少贪杯人
- 酒壶里吵架——胡(壶)闹
- 酒壶里打跟头——壶(胡)来
- 酒壺
- 酒多
- 酒多人醉,书多人贤
- 酒多伤身,气大伤人
- 酒多画少