王攀 王正亚 孔德飞 阳小光 邓兆祥


摘要:以局部覆盖机敏约束层阻尼薄板为研究对象,对振动主动控制展开了研究。首先用ADF阻尼模型表征黏弹性层的阻尼特性,利用有限元法建立系统的动力学模型;并考虑模型的庞大自由度问题,对模型进行降阶处理;其次针对作动器和传感器位置对控制性能的影响问题,综合考虑控制输入与传感输出间关系,优化了作动器与传感器的位置,并对优化后理论模型进行了实验验证;最后针对模型模态参数误差和因舍去高频模态导致的模型混合不确定性问题,设计了μ综合鲁棒控制器,并通过硬件在环实验对控制效果进行验证。实验结果表明:复杂周期信号激励下的振动响应幅值衰减30%左右,白噪声激励下的振动响应的均方根值降低了9.1%左右。
关键词:振动主动控制;机敏约束层阻尼;位置优化;μ综合鲁棒控制
引言
机敏约束层阻尼(Smart Constrained Layer Damping,SCLD)技术兼顾被动约束阻尼与主动控制的優点,其结构与被动约束阻尼技术非常相似,但SCLD的约束层采用纯主动控制的智能材料,既解决了传统被动约束阻尼技术对低频振动控制欠佳问题,又解决了纯主动控制因不可靠失效导致的减振效果完全丧失的缺点。这为解决汽车车身薄板结构在300 Hz以内的低频振动提供了新的解决方案。
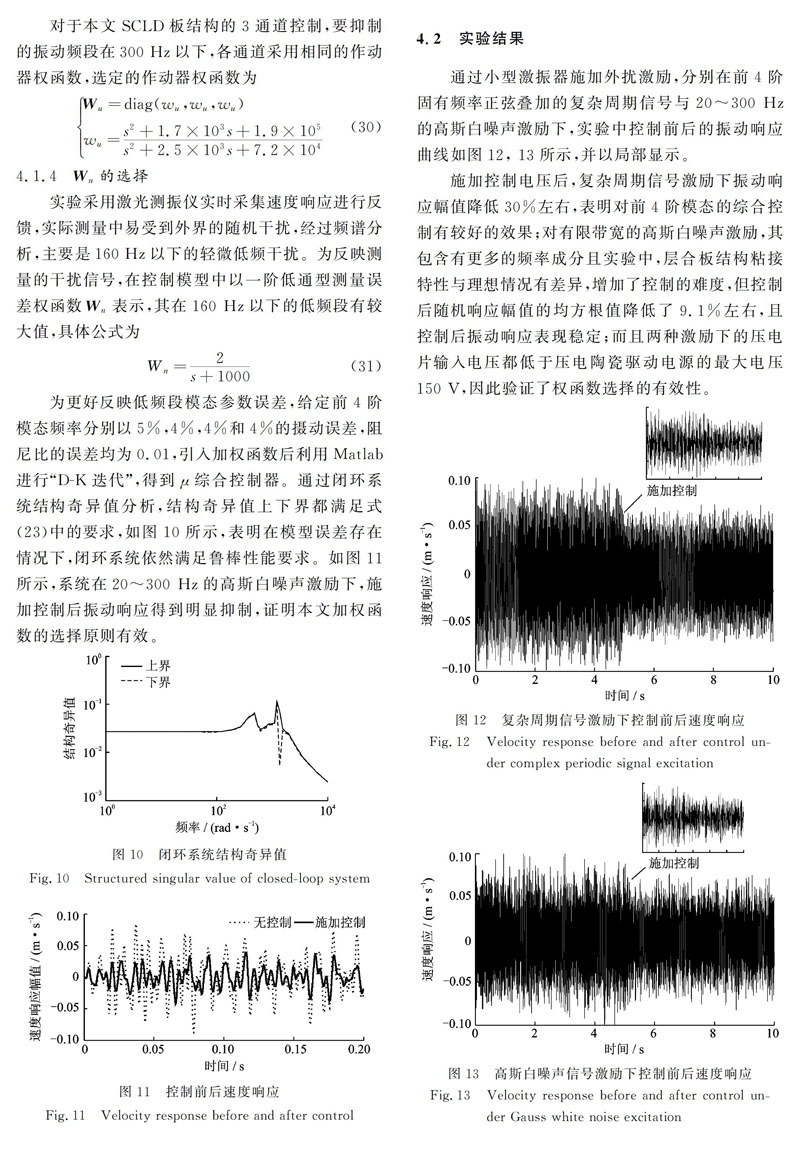
在局部覆盖机敏约束层阻尼(SCLD)板结构的建模中,通常由于建模假设、材料参数误差及模型降阶舍去高频模态等,难以保证用于控制器设计的模型精确性,即出现模型不确定性。虽然,对SCLD结构的H∞鲁棒控制研究证明了H∞控制有较好的鲁棒性,但在处理多个不确定性因素时,其没有考虑不确定性的结构化特征,导致控制具有很大的保守性。而基于结构奇异值理论的μ综合鲁棒控制考虑了模型不确定性的结构化特征,降低了保守性,能同时保证鲁棒稳定性和鲁棒性能,是振动控制领域的研究热点,但其应用于机敏约束层阻尼技术的研究却很少,且SCLD结构模型不确定性因素较多,增加了控制的难度。同时,作动器与传感器的配置位置对控制性能有较大影响,不当的配置位置会导致控制失稳;为保证较大的控制能力和观测能力,大多文献采用基于可控可观性准则的位置优化,但没有考虑作动器与传感器间的位置关系,只能单独对作动器或传感器位置进行优化。
针对以上问题,本文以局部覆盖SCLD对边固支板为研究对象,采用基于模态H2范数的可控可观性准则,综合考虑控制输入与传感输出的关系,进行作动与传感的位置配置;并针对模型的混合不确定性问题设计出了μ综合鲁棒控制器,并开展了振动控制仿真与实验研究。
1机敏约束层阻尼结构动力学模型
机敏约束层阻尼(SCLD)结构自下而上分别为基层(BASE)、黏弹性阻尼层(VEM)和压电约束层(PZT),当基层板振动时,黏弹性层发生剪切变形并消耗振动能量,控制器根据传感器采集的振动信息,主动调节压电层的电压使其产生拉伸或压缩,使黏弹性芯层的剪切变形进一步加强,增强结构阻尼力,从而提高结构振动能量耗散能力。
利用有限元法将板离散为多个矩形单元,其中SCLD部分单元如图1所示,其长和宽分别为a和b。每个单元有4个节点,每个节点有7个自由度,这7个自由度分别是约束层、基层面内x向和y向位移自由度,结构沿z向的位移自由度,单元绕x轴转角自由度,及绕y轴转角自由度。
- 社区治理现代化的实践与思考
- 关于深入推进深度贫困民族地区脱贫攻坚的调查与思考
- 突显基层区域性党建优势夯实新型社区党建基础
- 党的作风建设永远在路上
- 论持之以恒坚持党校教学“三为主”原则
- 关注关爱失地农民促进社会稳定发展
- 从边缘到中心:开放之路在中国
- 改革开放四十年社会道德的变迁
- 新时代乡村知识分子在乡村治理体系中的作用探究
- 乐山旅游发展四十年回顾与展望
- 找准战略性新兴产业 建设乐山创新高地
- 农村经济体制改革初期的政治动员机制探析
- 农村土地流转研究文献综述
- 改革开放前后支付方式的变迁
- 改革开放四十年产业结构对我国经济增长影响的实证分析
- 从先富共富到共享发展
- 邓小平现代化战略目标的形成与发展探析
- 改革开放四十年的变与不变
- 江山多娇 人生芳华
- “互联网+”背景下农村电商扶贫的机遇、挑战及应对
- 科技创新与经济发展融合问题研究综述
- “互联网+”时代乐山旅游信息化建设探讨
- 关于国企混合所有制改革的几点认识
- 《资本论》是马克思的宏伟纪念碑
- 方法之维:审判团队的构建与完善
- pooh-pooh
- pooh-poohed
- pooh-pooher
- pooh-poohers
- pooh-poohing
- pooh-poohs
- poohs
- pool
- pooled
- pooler
- poolers
- poolest
- pooling
- pool's
- pools
- pool/swimming pool
- pooly
- pool²
- pool¹
- pooped
- pooper scooper
- poop scoop
- poor
- poor/bad
- poorer
- 上席
- 上平
- 上平声
- 上年
- 上年头年
- 上年纪
- 上床
- 上床便睡,定是高人;支枕无眠,必非闲客
- 上床夫妻,下床君子
- 上床夫妻,落地君子
- 上床睡觉
- 上床脱屣,不知生死
- 上床脱屣,不知生死。
- 上床萝卜下床姜
- 上床萝卜下床姜。
- 上庙不烧香——眼里没神
- 上庠
- 上座
- 上座率
- 上引号
- 上弦
- 上弦月
- 上弦的月亮
- 上 当
- 上当