荣庆
摘 要:本文针对单模型的机动目标,具体阐述了匀加速模型(CA)的应用实例,通过算法仿真分析出这两个模型在实际应用中的优缺点,并且指出CV模型应用的局限性,以及CA模型在加速度跳变的时刻存在一个收敛的过程,为以后通过改善跟踪门来解决单模型机动目标跟踪性能的方案提供参考依据。
关键词:机动目标;雷达跟踪;仿真;匀加速单模型
DOI:10.16640/j.cnki.37-1222/t.2019.14.116
1 提出问题及场景假设
(1)问题描述。本文研究的例子是二维平面雷达。然而,当发现目标运动的时候,要实现准确无误的追踪目标就显得有一定难度,因为一般情况下,很难十分精准的预测运动目标的下一步状态[1]。因此就需要提供準确的机动目标跟踪模型。现如今广泛使用的机动目标跟踪模型一般为匀速度模型(CV),匀加速模型(CA)以及Signer模型[2]。由于量测数据大多含有噪声和杂波,为了提高目标状态(位置、速度等)估计精度,通常要对量测数据进行预处理以提高数据的准确度和精度。
(2)场景假设。假设有一个坐标雷达来观察飞机上的移动目标。移动速度为200米/秒,目标的起点为原点,匀加速度运动在x轴方向上进行50-100秒。加速度ax=20m/s,ay=0m/s,并且在x轴的正方向上以100-150s执行恒速线性运动,实现目标机动。设定雷达的扫描周期T=2秒,针对于目标进行观察,其噪声的标准差等于100米。建立了雷达跟踪算法,建立算法仿真。
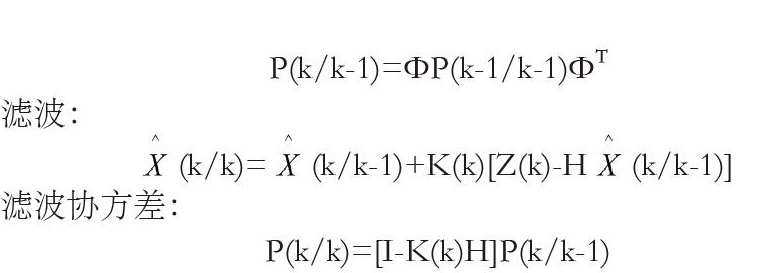
2 模型算法
考虑随机干扰情况。当目标无机动,即目标作匀速或匀加速直线运动时,可分别采用常速CV模型或三阶常加速CA模型。
从以上方可看出,CV和CA都适用于线性模型,为目标跟踪算法优化计算。但是当目标发生机动,其加速度矢量有了改变,运用此模型后的跟踪效果将会不太理想,因此就要求立足于目标的机动情况来运用相关模型。
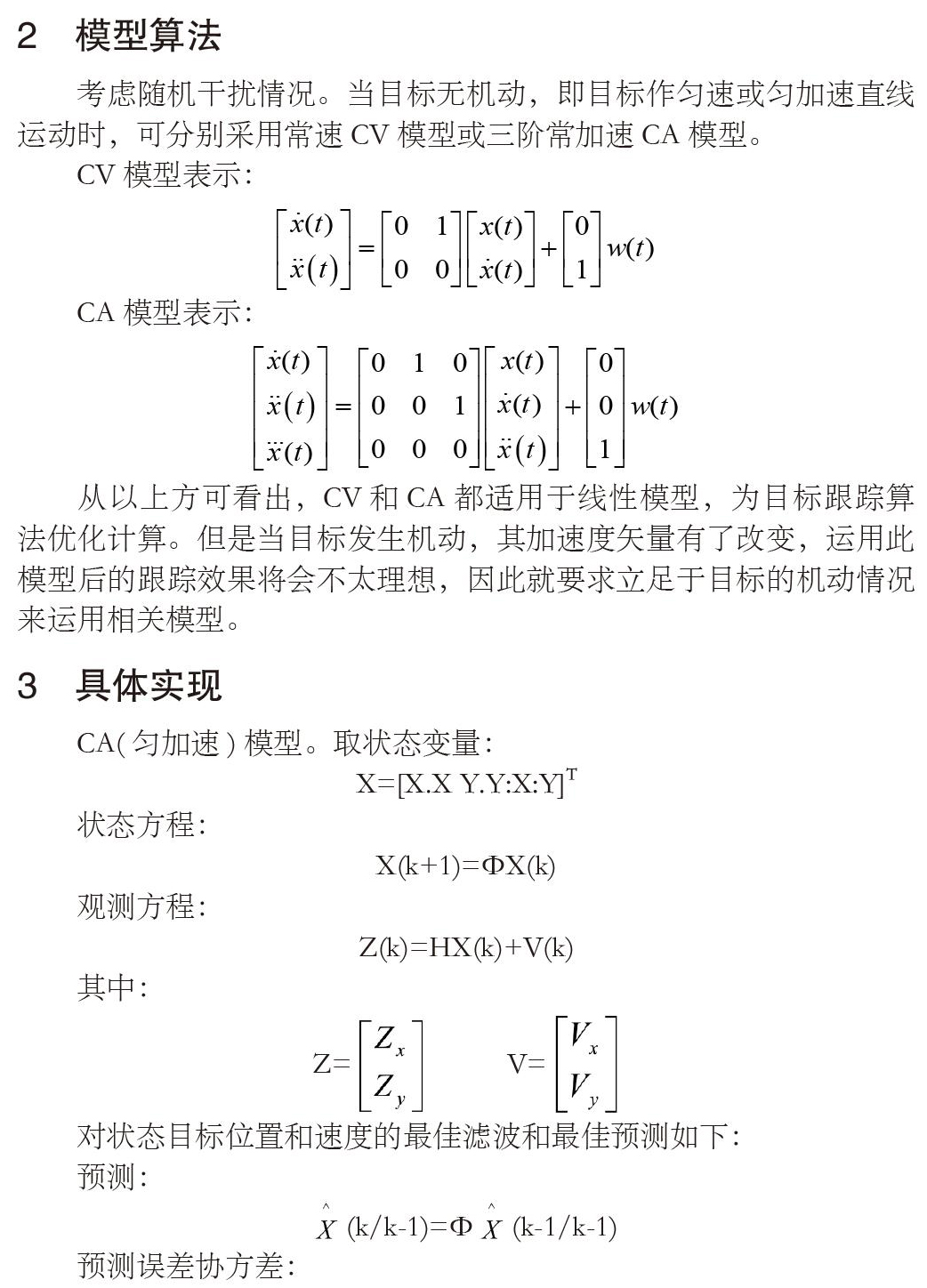
3 具体实现
4 仿真结果
仿真程序通过MATLAB平台来编写,机动目标跟踪滤波器采用蒙特卡罗来仿真。并且获得仿真结果。
CA模型(左)和singer模型(右)。
由上图可知,对于位置和速度两个指标来说,有无杂波基本上不会受到影响,在图2中可以看出,在50点和100点处,由于加速度发生跳变,目标跟踪丢失,误差比较大,但是经过一段时间迭代,又重新收敛。
图2显示了CA模型的速度估计与速度的标准差,由图可知该算法在滤波开始时需要一定的收敛过程存在比较大的误差,并且在加速度突变时,也是存在一个收敛的过程,这与实际是相符合的。综上可知,CA模型在加速度跳变的时刻存在一个收敛的过程,当达到收敛时其在加速段的跟踪效果比在匀速段跟踪的效果要好。
5 结束语
根据仿真结果,如果是均匀加速目标,可以使用CA模型获得不错的跟踪效果;然而,如果是大机动目标,通常存在机动跟踪延迟的问题。CA模型对于弱机动目标和加速度突变情况跟踪性能较差,杂波对跟踪性能影响比较大。可以引入Singer模型及“当前”统计模型来跟踪目标。在杂波情况下,可以通过改善跟踪门来解决性能。
参考文献:
[1]王丽娜.基于卡尔曼滤波的单模型目标跟踪算法的仿真研究[J].中国新通信,2016.
[2]刘楠.基于机动目标跟踪模型的自适应滤波算法[D].浙江理工大学,2016.
- 湘品牌 佳天下
- NCG在仔猪生产中的应用研究
- 中草药防治奶牛乳房炎研究进展
- 乌骨鸡黑色素的研究进展
- 实施质量安全管理,提高全员质量意识
- 陈志军在全省市州饲料办主任会议上的讲话摘要
- 全省市州饲料办主任会议暨部省级示范企业授牌表彰仪式在长沙举行
- 《畜禽规模化养殖丛书》出版农业部副部长于康震作序
- 供应偏紧格局依旧后市猪价高位调整
- 湖南省人民政府办公厅关于建立病死畜禽无害化处理机制的实施意见
- 2015年畜牧业生产形势及2016年形势预判
- 湖南帝亿生物科技股份有限公司
- 郴州湘大骆驼饲料有限公司
- 湖南大北农农业科技有限公司
- 褐色脂肪及其产热功能的研究进展
- 叶酸在畜禽生产中的应用及其作用机理
- 万寿菊中叶黄素的提取以及前景
- 黄曲霉毒素B1对肉鸭生产的影响研究进展
- 带优秀团队做优等服务树优质品牌
- 娄底大北农年产24万吨新型饲料生产项目奠基仪式隆重举行
- 2015年中南地区油脂油料产业高峰论坛嘉宾观点梳理
- 县饲料办组织相关企业到郴州湘大参观学习
- 抓好人的管理循序渐进深度推进创建工作
- 郴州市清理小包装饲料添加剂和添加剂预混料市场
- 高效新型抗氧化剂在饲料中的抗氧化比较
- sand¹
- sane
- sanely
- saneness
- sanenesses
- saner
- sanes
- sanest
- sang
- sanitaries
- sanitarily
- sanitariness
- sanitarinesses
- sanitarium
- sanitariums
- sanitary
- sanitary napkin
- sanitary pad
- sanitary towel
- sanitary towels
- sanitation
- sanitationist
- sanitations
- sanities
- sanitise
- 何痛如之
- 何益
- 何直一哂
- 何知仁义, 已飨其利者为有德。
- 何等
- 何等样
- 何粉
- 何组卜辞
- 何绍基
- 何缘
- 何罪之有
- 何翅
- 何者
- 何肉周妻
- 何胤
- 何能涯涘
- 何腾蛟
- 何至于此
- 何若
- 何若乃尔
- 何苦
- 何苦乃尔
- 何苦来
- 何范
- 何處