马立群++段朝阳??
摘要:针对以冲压发动机为动力的远程战术导弹, 描述了其飞行过程与特点。 从制导律设计和控制律设计两个方面, 综述了国内外相关技术的设计方法, 论述了弹道优化技术、 制导控制一体化、 针对目标机动的制导律、 BTT控制与速度控制技术的研究现状, 探讨了冲压发动机导弹在制导控制方面的发展方向。
关键词:冲压发动机; 远程导弹; 制导与控制; BTT导弹; 一体化设计
中图分类号: TJ765.1文献标识码: A文章编号: 1673-5048(2016)02-0017-07
0引言
远程战术导弹可以实现超视距打击、先敌发射,因此在空战、海战、防空反导方面都具有明显的优势,在现代战争中的地位日益重要。为了使导弹射程增加,传统的方法是加大单级火箭发动机,或采用多级火箭推力。随着冲压发动机技术的
发展,越来越多的导弹采用火箭与冲压的混合动力装置。相比于火箭发动机,冲压发动机具有体积
小、质量轻、比冲大等特点,可以使导弹巡航速度
收稿日期:2015-10-21
作者简介:马立群(1988-),男,吉林四平人,博士研究生,研究方向为飞行器制导与控制技术。
更快、射程更远。对于质量相同的导弹,采用冲压动力方式比采用固体火箭的射程要大一倍之多,因此冲压发动机被视作下一代空空导弹、反舰导弹、反辐射导弹的首选动力装置[1]。
冲压发动机出现于20世纪50年代,其最初的设计目的是应用于单级入轨飞行器、远程高速飞机与导弹。60年代到80年代,整体式火箭冲压发动机的研究进展飞速,双用途燃烧室、整体式助推发动机技术、贫氧推进剂的研制均取得了重大突破,为后续在导弹上的广泛应用奠定了基础。90年代至今,随着高超声速飞行器概念的提出与发展,作为其主要动力装置的超燃冲压发动机技术更是各军事强国竞争的焦点。目前,美、俄、法、印等国都在发展适用于高马赫数飞行器的超燃冲压发动机。
除在研技术外,在国外,冲压发动机已经在很多服役的导弹型号上得到应用,如欧洲多国研制的“Meteor”空空导弹、俄罗斯的“SA-6”防空导弹、美国的“GQM-163”反舰导弹等[2-3]。以“Meteor”导弹为例,在制导控制方面,由于其升力弹体构型限制,导弹大部分飞行弹道都采用倾斜转弯方式(BTT),在拦截点前很短的一段时间,机动模式转为侧滑转弯方式(STT),以增加导弹的敏捷性[4]。相比于国外,国内现役的以冲压发动机为动力的导弹型号还不多见,多数还存在于理论研究阶段。
本文针对以冲压发动机为主要动力的远程导弹,描述了导弹飞行的一般过程与特点,总结了国内外制导与控制研究发展现状,分析了在制导与控制设计发展过程中的关键技术。
1飞行过程与特性
1.1冲压发动机导弹飞行过程
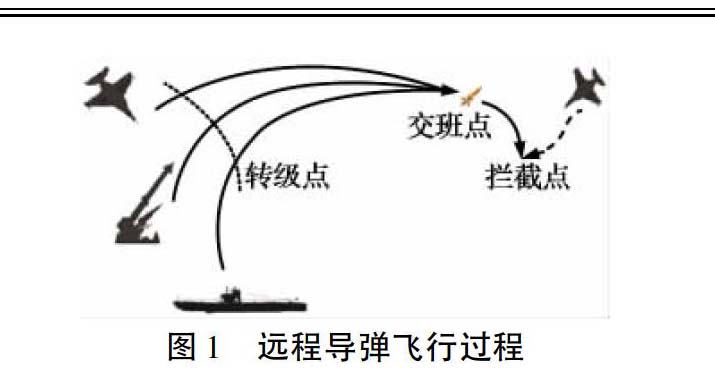
对于以冲压发动机为动力的导弹来说,导弹从载体上发射分离,首先需要以火箭发动机助推导弹使冲压发动机达到转级状态;随后导弹继续爬升至一定高度转入平飞阶段;导弹的中段飞行主要是将导弹引导至导引头可以工作的范围之内;在飞行末段,导弹导引头开始工作(一般为雷达或红外导引方式),感受目标源的信号,通过制导算法使导弹达到最后预测的拦截点。与近程导弹采用单一制导方式不同,远程导弹一般采用复合制导的方式。在初始发射段,由于对精度没有太多要求,一般采用程控制导,使导弹尽快脱离载体,达到一定的高度和速度;中制导阶段由于达不到导引头的作用距离,导弹一般通过数据链接收数据,采用惯性制导方式将导弹引向目标,并配合GPS等方式加以校正保证制导精度;在达到中末制导交班点后,导弹进入寻的制导模式,通过导引头截获的目标信息,将导弹引导至制导律解算出的拦截点处,对目标实现有效毁伤。一般远程冲压发动机导弹的飞行过程如图1所示。
1.2冲压发动机导弹飞行特点
结合导弹的飞行过程与发动机特性,可以看出远程冲压发动机导弹具有以下几个显著特点:
(1)多约束。冲压发动机导弹具有严格的飞行状态限制,要满足多个状态约束,包括法向过载
限制、巡航高度限制、巡航速度限制、迎角与侧滑角限制等。同时,为实现导弹的最佳作战性能,要尽量考虑最短飞行时间、最远射程、最省燃料等指标最优。在中末制导交班处,还要考虑导弹的入射角、飞行速度、飞行姿态。
(2)多耦合。冲压发动机导弹多见于面对称构型,适用于BTT控制,因此会存在一定程度上的耦合问题。从制导角度来说,视线的俯仰和偏航通道存在严重的交叉耦合,因此传统的假设姿态控制稳定,俯仰与偏航通道解耦设计就不再适用;从控制的角度来说,BTT导弹在高速滚转时会产生俯仰和偏航运动的交叉运动耦合,而面对称飞行器滚转与偏航的耦合关系又会产生对飞行不利的侧滑角,因此针对STT控制的三通道独立设计不再适合BTT控制。
(3)多不确定性。由于射程较远,远程导弹在飞行过程中需要面对许多的不确定性,包括气动不确定性、传感器噪声、与作战平台数据交换时的干扰与延时、对机动目标估计的误差等,这些都会给制导与控制系统的设计造成一定困难。
可以看出,远程冲压发动机导弹具有许多不同于常规动力导弹的飞行特点,这为导弹的制导控制系统设计提出了很多新的难点和挑战。
2制导律设计的发展
针对设计方法的不同,冲压发动机导弹相关的制导律可分为经典制导律设计、最优制导律设计与现代制导律设计。经典制导律结构简单,物理意义直观,直到现在仍然是工程中的首选方法。但随着科技的不断进步,武器装备的革新,越来越强调要充分挖掘导弹的最大潜力,于是最优制导律应运而生。在制导律设计的过程中,导弹模型实质上是一个典型的时变不确定非线性系统,而经典制导律的设计都是基于线性模型得来,很难满足现代导弹的制导需求,随着控制理论的不断发展,学者们提出了基于不同方法的现代制导律设计。
2.1经典制导律设计
基于早期几何概念的制导规律通常称为经典制导规律,主要有追踪法、平行接近法、比例导引法。其中比例导引法(PN)是最常见的导引律形式,具有结构简单、技术上易于实现、弹道平滑等优点,在理论证明和实际应用中都较为成熟。学者们在PN的基础上,又提出了一系列的算法改进形式,包括理想比例导引(IPN)、增广比例导引(APN)、真比例导引(TPN)等。国外在PN算法上研究较早,其中,Guelman[5]基于Popov稳定性理论,给出了有限时间比例导引的稳定性证明;文献[6]考虑到对目标加速度估计的时延问题,证明了PN针对目标在弹目平面内机动制导性能更好,而APN针对目标在弹目平面外机动导引效果更佳;文献[7-8]提出了将传统的PN进行改进,以适应不同种类导弹的制导需求。
国内方面,吴文海等[9]系统地比较了各种比例导引方法的含义、定义与特性,分析得出了不同的比例导引改进方式的使用范围;方群等[10]从修正和补偿思想出发,推导了PN的抗干扰能力,在此基础上,引入了一种修正的PN,从而使得导引算法可以克服各种干扰,达到较好的制导效果。尽管比例导引已在多种导弹型号上得到应用,但还存在一些缺陷,如对目标机动的假设和估计在实际中都较难实现。
2.2最/次优制导律设计
针对不同导弹的不同战术要求,许多学者应用最优或次优方法来设计制导律,实现燃料最省,提高导弹射程,实现最短时间飞行,避免目标逃逸,使导弹具有更为理想的打击效果。文献[11]以最小时间为性能指标,应用逐步二次规划法(SQP)优化远程冲压发动机空空导弹的中制导;文献[12-13]考虑到末端角约束的限制,解决了一种非线性优化控制问题,分别设计了拦截弹中、末段的次优制导律;微分策略(DGT)主要是研究在微分方程的约束下,对策的双方如何进行最优控制的问题,在制导律中有着广泛的应用,Shaferman,徐兴元等[14-15]分别利用微分策略设计了拦截导弹的制导律,相比于PN导引方法,DGT可以以更少的信息获取量,达到更好的拦截效果;王华等[16-17]结合冲压发动机特性分析了地空导弹的爬升特性,分别就飞行时间最短和燃料最少两种末端性能指标,利用遗传算法对爬升弹道进行优化;段磊[18]在建立了远程空空导弹非线性三通道模型的基础上,采用多时间尺度技术,解决了BTT导弹在末制导段快速滚转时的次优控制指令问题。除上述方法外,奇异摄动理论、伪谱法等[19-20]理论也被用于制导律优化上。
2.3现代制导律设计
针对导弹在飞行中的非线性与不确定性,学者们致力于将先进控制理论应用到制导律的设计当中,以提高制导过程的鲁棒性。
(1)非线性制导律。非线性方法的研究近年来受到广泛关注,在导弹制导律设计中也得到了借鉴和应用。李君龙等[21]考虑在导弹拦截末端的接近点,通过非线性精确线性化理论,将弹目运动方程转化为线性模型,再通过状态反馈设计控制器;李超勇等[22]给出时域下指令攻角的算法和微分几何制导律,并研究了制导律在拦截高速目标时的捕获条件和奇异条件,通过仿真分析了该算法的优越性。但上述制导律均需要精确的目标运动信息,不适用于拦截具有高机动能力的目标。
(2)滑模制导律。滑模变结构控制对于摄动和扰动均有一定的抑制作用,在导弹的制导律设计中得到了广泛的应用。Brierley等[23]将比例导引律设为基础的滑模面,设计了空空导弹的滑模变结构制导律,并对滑模的存在性和收敛性进行了推导;李志平等[24]利用观测目标机动加速度的设计思想,提出了基于目标机动补偿的滑模变结构制导律;在利用趋近律设计滑模变结构制导律的基础上,设计了制导系统的目标机动观测器,实现了针对目标高速与机动的自适应制导。
(3)智能制导律。智能控制在处理非线性复杂系统上具有明显优势,在制导律的设计上也受到许多关注。Cottrell等[25]基于神经网络设计了动能拦截导弹的末制导律,与APN相比,可减少导弹的体积和质量,达到最优拦截效果;ZhangLei,Creaser等[26-27]以模糊控制为基础,结合PID控制、自适应控制等方法,设计导弹的制导律,通过仿真说明了算法相对于APN和DGT的优越性;李士勇等[28]以拦截大机动目标为目的,将目标的机动加速度视为外界干扰,结合自适应控制与模糊控制设计末制导律,保证了弹目视线角速率在较小的范围,提高了制导系统的鲁棒性。
现代制导在针对拦截高机动目标、提高制导系统鲁棒性等方面有明显优势,但使制导系统更为复杂、物理意义不直观,在向实际工程转化中还需要进一步探讨与研究。
3控制律设计的发展
控制律依据设计方法的不同,可分为经典设计方法和现代控制设计方法。经典设计方法首先将导弹模型简化为SISO线性时不变模型,在此基础上利用根轨迹、Bode图等方法设计控制参数;随着控制理论与电子计算机技术的发展,越来越多的先进方法也被学者和工程师们应用到导弹的自动驾驶仪设计当中。
3.1经典控制律设计
现阶段大多数导弹的控制系统是采用时频域方法设计的,这种方法简单实用、物理概念直观,设计人员可以依据丰富的工程经验,通过对控制参数的不断调整优化,最后达到理想的控制效果。早在20世纪80年代,针对BTT导弹,文献[29]设计了三通道解耦控制,首先设计俯仰和偏航的PI控制器,通过偏航角速率增加荷兰滚阻尼,在滚转通道用滚转角和滚转角速率反馈;Kovach等[30]忽略了三通道的耦合关系,利用频率法和根轨迹独立设计三通道的控制器,保证了俯仰和滚转通道满足设计要求,并使偏航通道的响应速度与滚转通道相同;赵霞[31]针对冲压发动机防空导弹,通过在偏航速率的交叉支路上附加一个滚转速率的指令,来消除导弹机动时大滚转速率下,俯仰偏航通道耦合所产生的侧滑角的影响。经典控制律易于实现,但在针对大包线飞行、强非线性、多不确定性等方面,经典控制弊端明显,所得到的控制效果往往不尽如人意。
3.2现代控制律设计
现今,多种先进控制方法已取得完备的理论证明,相比于经典控制,其控制性能好、鲁棒性强,具有一定的优势。
(1)自适应控制。现代战术导弹具有飞行包线大、多不确定性等特点,学者通过应用自适应控制来抑制这些不利影响。TanFeng等[32]应用一种适用于线性时变系统的增益调度方法设计导弹控制,保证了全局稳定性与闭环控制性能,设计过程简单灵活,易于转化到工程之中。L1自适应方法是在传统模型参考自适应(MRAC)的基础上,通过增加低通滤波环节,降低高自适应所带来的系统振荡。Peter等[33]在基准控制的基础上设计了L1自适应导弹自动驾驶仪,以补偿模型不确定所带来的影响,同时保证系统的稳定性与快速性。
(2)变结构控制与反步控制。变结构滑模控制具有响应速度快、超调量小、结构简单等特点,近年来受到众多学者的关注,滑模控制针对模型不确定和外界干扰具有强鲁棒性;反步控制是一种非线性方法,其在不确定非线性系统的鲁棒或自适应控制器设计方面受到许多学者的重视。变结构控制与反步控制的结合,在导弹控制系统的设计中得到了广泛的应用。朱凯等[34]将反步控制与滑模控制相结合,设计了一种新型的BTT导弹控制器,应用滑模控制的强鲁棒性,解决了反步控制的“计算膨胀”问题,省略了微分器或滤波器的引入,大大简化了控制器的设计;董朝阳[35]针对BTT导弹,在标称模型上设计反步控制器,在此基础上,增加一个积分滑模控制补偿,提高系统的鲁棒性,以抑制模型不确定和外界干扰所带来的不利影响。
(3)智能控制。智能控制具有处理复杂非线性系统的能力和一定的鲁棒性与容错性,这些特性都是导弹控制系统设计者所关注的。McFarland等[36]针对一型防空导弹,在动态逆控制的基础上,增加反馈神经网络在线学习补偿器,通过仿真证明所设计控制器相较传统增益调节方法的优越性;McDowell等[37]针对BTT导弹,应用高斯型径向基神级网络,补偿导弹在整个包线飞行时所出现的时变动态不确定与操纵机构饱和,解决了固定增益在导弹大空域飞行时所带来的限制;魏喜庆[38]针对导弹强耦合非线性时变特性,分别将自适应控制与逆系统两种方法与神网络相结合,设计了两种BTT控制器,通过仿真验证了算法相较三通道法的优越性。
除上述研究成果,非线性控制、鲁棒控制等[39-40]先进控制方法也在冲压发动机导弹的控制中得到借鉴和应用。应用现代控制理论,导弹控制律在性能与鲁棒性上具有一定的优势,但计算量与实时性问题是现代控制算法向工程转换所急需解决的问题。
4制导与控制发展的关键技术
针对导弹自身特点以及现代战场的复杂特性,本文认为,远程冲压发动机导弹还需要从以下几个方面进行深入研究。
4.1弹道优化设计
弹道优化设计是现代导弹制导控制设计的关键技术之一。在实际的工程中,冲压发动机导弹一般是在爬升后进入平飞巡航状态,巡航的高度和速度等状态一般是依照设计者的经验和大量仿真所确定,并不是理论上的最优弹道。文献[41]针对冲压发动机导弹,通过仿真比较了在不同巡航高度下的导弹制导性能,并分别基于经典控制和最优控制设计了导弹的自动驾驶仪。文献[42-44]考虑不同的指标,分别对冲压发动机导弹爬升、平飞巡航进行了一定程度的优化。上述文献中的优化设计方式都是在离线静态环境下进行的。Halswijk等[45]指出离线优化方法的鲁棒性在飞行状态变化剧烈时很难保证,制导性能会大大降低,所得到的导弹也就不是最优的。如何保证导弹在最优状态下飞行,具有一定的抗干扰能力且易于工程实现,需要进一步探讨。
4.2制导控制一体化(IGC)方法
在传统的导弹制导律设计过程中,通常将导弹的动态特性简化为无惯性质点,这样可以大幅度降低设计复杂性与时间成本。但在现实中,导弹的动态特性是一个存在惯性的高阶复杂系统,不考虑导弹动态特性得到的制导律不是最优的。另外,完全忽略制导与控制之间的耦合关系,也不利于充分发挥导弹的机动过载能力。
IGC可以由弹目之间的运动关系直接得出导弹的舵偏角指令,以控制导弹截获目标。Williams等[46]最早提出一体化的概念,随后得到了各国学者的广泛关注;XinMing等[47]同时考虑制导与控制为性能指标,用一种次优控制方法——θ-D算法设计制导控制一体化系统;Menon等[48]针对质量矩再入弹头,建立了9自由度制导控制模型,应用反馈线性化实现控制;国内方面,段广仁等[49]利用非线性状态变换将一体化模型转化为标准形式,利用变结构滑模方法,设计了一体化控制律来抑制系统中的非匹配不确定性;薛文超等[50]针对一体化模型的高阶数与多不确定性,提出了应用自抗扰控制方法来实现制导控制一体化,并对系统中的非线性不确定性进行实时的补偿与估计;尹永鑫[51]等以微分几何方法对一体化模型进行反馈线性化,并依据所期望的性能,应用特征结构配置方法设计三维一体化控制系统的结构。尽管近年来一体化技术得到飞速发展,但在一体化模型建立、高阶复杂系统的处理、抑制不确定等方面还需要进一步研究。
4.3目标机动与状态估计
现代战争中,导弹打击目标的机动性日益增强,如无人机、新一代战斗机、战术弹道导弹等。经典的制导律不考虑目标机动,或只考虑简单机动,将复杂机动作为未知扰动看待。由于对目标的机动加速度难以实时在线测量,经过复杂的数学处理获得的目标信息也存在时延等问题,因此,包含目标加速度信息的制导律,在目标进行大机动时,很容易造成脱靶。文献[52-53]论述了目标进行机动时对制导律的影响。因此,大机动目标的制导律,以及对状态的预测和估计,都是需要着重研究的问题。
文献[54-55]均在PN的基础上对目标逃逸机动进行指令补偿;马克茂等[56]在此基础上,设计了变结构制导律,同时应用高增益观测器对视线变化率进行估计;董朝阳等[57]提出预测交班点的概念并给出中制导段的性能指标,设计了满足约束的最优中制导律。综上,如果能对目标机动合理建模,或采用具有理论和工程价值的观测器和滤波器,将有助于在目标机动时提高制导精度。
4.4BTT控制与速度控制
面对称的构型与小侧滑角的约束,决定了冲压发动机导弹在飞行时主要采用BTT控制技术。BTT具有机动性强、升阻比大、稳定性好等特点,对于大机动导弹和远程导弹来说有明显优势。
美国在20世纪50年代就将BTT技术应用于波马克导弹的设计中[58],此后各国学者一直在不断地研究、探讨和发展这一技术。沈成林等[59]就BTT导弹在制导与控制上的问题与难点进行了描述;Nesline等[60]应用经典控制和线性二次调节器研究了BTT导弹的自动驾驶仪设计。尽管BTT控制发展已有多年,但在动力学研究和控制领域还有许多问题,如导弹运动与控制上的耦合、非线性与自适应性、复合控制问题以及系统状态优化等。
冲压发动机区别于火箭发动机,可通过流量调节装置调整推力,增加一维的速度控制,使导弹在末制导段具有全速拦截能力,减小脱靶量。此外,冲压发动机的推力依赖于高度、攻角和弹道倾角等状态,因此,推力并不是恒定的,必须对速度加以控制。文献[61]给出针对冲压发动机的双速度控制律结构,通过“小范围”控制来维持马赫数不变,“大范围”控制用于大幅度速度变化。在导弹飞行中,发动机的推力会影响弹道,且导弹的飞行状态改变也会影响发动机工作状态,为保证弹道理想,须对速度加以精确控制。此外,应用于飞机的速度控制技术也可借鉴于导弹之中。
5结束语
制导与控制系统对于导弹的关键性与重要性不言而喻。在越来越强调超视距、高精度打击的现代战争中,制导与控制系统的设计是满足导弹战术要求的核心技术之一。以冲压发动机为动力的远程战术导弹出现已有多年的历史,但在制导与控制设计方面,针对高机动目标的制导方法、考虑多约束的全弹道优化、针对导弹动态特性的制导设计等先进技术还需要学者与工程师进一步的研究和探索。本文综述了国内外相关的制导律与控制律设计方法,可以为以后的冲压发动机导弹研制提供参考与借鉴。
参考文献:
[1]鲍福廷.固体火箭冲压发动机的发展及关键技术[C]∥中国宇航学会固体火箭推进第22届年会论文集,2005:304-309.
[2]FryRS.ACenturyofRamjetPropulsionTechnologyEvolution[J].JournalofPropulsionandPower,2004,20(1):27-58.
[3]张明,田宏伟,梁彦.冲压发动机在战术导弹上的应用[J].飞航导弹,2005(6):50-53.
[4]陈怡,闫大庆.流星导弹的关键技术及最新研制进展[J].飞航导弹,2012,(6):17-21.
[5]GuelmanM.TheStabilityofProportionalNavigationSystems[C]∥AIAAGuidance,NavigationandControlConference,Portland,OR,1990.
[6]ImadoF,KurodaT,IchikawaA.ATradeoffStudybetweenConventionalandAugmentedProportionalNavigation[C]∥AIAAGuidance,NavigationandControlConference,SanDiego,CA,1996.
[7]YuanPinJar,ChernJengShing.IdealProportionalNavigation[J].AdvancesintheAstronauticalSciences,1992,95(5):501-512.
[8]YuanPinJar,ChenMingGhow,ChernJengShing.ExtendedProportionalNavigation[C]∥AIAAGuidance,NavigationandControlConference,Denver,CO,2000.
[9]吴文海,曲建岭,王存仁,等.飞行器比例导引综述[J].飞行力学,2004,22(2):1-5.
[10]方群,陈武群,袁建平.一种抗干扰修正比例导引律的研究[J].宇航学报,2000,21(3):76-81.
[11]KurodaT,MiharaS,MatsudaH,etal.OptimalMidCourseGuidanceofVariableFlowDuctedRocketMissiles[C]∥AIAAGuidance,NavigationandControlConference,Boston,MA,1998.
[12]IndigN,AsherJZB,FarberN.NearOptimalSpatialMidcourseGuidanceLawwithanAngularConstrain[J].JournalofGuidanceControlandDynamics,2012,37(1):214-223.
[13]IndigN,AsherJZB,SigalE.NearOptimalMinimumTimeGuidanceunderaSpatialAngularConstraintinAtmosphericFlight[C]∥AIAAGuidance,NavigationandControlConference,Kissimmee,Florida,2015.
[14]ShafermanV,ShimaT.LinearQuadraticDifferentialGamesGuidanceLawforImposingaTerminalInterceptAngle[C]∥AIAAGuidance,NavigationandControlConferenceandExhibit,Honolulu,Hawaii,2002.
[15]徐兴元,蔡远利.具有碰撞角约束的微分对策导引律研究[J].弹箭与制导学报,2015,35(4):1-4.
[16]王华,杨存富,刘恒军.冲压发动机为动力导弹爬升弹道优化[J].弹箭与制导学报,2008,28(3):185-188.
[17]王华,杨存富,刘恒军.以冲压发动机为动力的导弹爬升弹道研究[J].现代防御技术,2008,36(4):27-30.
[18]段磊.一种针对采用冲压发动机的远程空空导弹末段制导算法研究[J].科学技术与工程,2012,12(27):7013-7018.
[19]HouHongyan,HagerW,RaoA.ConvergenceofaGaussPseudospectralMethodforOptimalControl[C]∥AIAAGuidance,NavigationandControlConference,Minneapolis,Minnesota,2012.
[20]乔洋,赵育善,陈士橹.一种奇异摄动最优中制导律在高超音速巡航导弹中的应用[J].弹箭与制导学报,2004,24(2):8-11.
[21]李君龙,胡恒章.一种基于反馈精确线性化的空间拦截末制导律[J].宇航学报,1997,18(4):13-17.
[22]李超勇,荆武兴,齐治国,等.空间微分几何制导律应用研究[J].宇航学报,2007,28(5):1235-1240.
[23]BrierleySD,LongchampR.ApplicationofSlidingModeControltoAirAirInterceptionProblem[J].IEEETransactionsonAerospaceandElectronicSystems,1990,26(2):306-325.
[24]李志平,郭建国,周军.基于目标机动观测器的滑模制导律设计[J].计算机测量与控制,2013,21(9):2474-2476.
[25]CottrelRG,VincentTL,SadatiSH.MinimizingInterceptorSizeUsingNeuralNetworksforTerminalGuidanceLawSynthesis[J].JournalofGuidanceControlandDynamics,1996,19(3):557-562.
[26]ZhangLei.AdaptiveFuzzyPIDControllersBasedonOptimalFuzzyReasoningforMissileTerminalGuidance[C]∥AIAAAreospaceSciencesMeetings,Orlando,Florida,2009.
[27]CreaserP,StaceyB,WhiteB.FuzzyMissileGuidanceLaws[C]∥AIAAGuidance,NavigationandControlConferenceandExhibit,Boston,MA,1998.
[28]李士勇,袁丽英.拦截机动目标的自适应模糊末制导律设计[J].电机与控制学报,2009,13(2):312-316.
[29]LinChingFang,YuehWR.CoordinatedBanktoTurnAutopilotDesign[C]∥AmericanControlConference,Boston,MA,1985:922-926.
[30]KovachMJ,StevensTR,ArrowA.ABanktoTurnAutopilotDesignforanAdvancedAirtoAirInterceptor[C]∥AIAAGuidance,NavigationandControlConference,Monterey,CA,1987.
[31]赵霞.防空导弹BTT控制解耦算法[J].四川兵工学报,2013,34(8):37-39.
[32]TanFeng,DuanGuangren.GlobalStabilizingControllerDesignforLinearTimeVaryingSystemsandItsApplicationonBTTMissiles[J].JournalofSystemsEngineeringandElectronics,2008,19(6):1178-1184.
[33]PeterF,HolzapfelF,XargayE,etal.L1AdaptiveAugmentationofaMissileAutopilot[C]∥AIAAGuidance,NavigationandControlConference,Minneapolis,Minnesota,2012.
[34]朱凯,齐乃明,秦昌茂.BTT导弹的自适应滑模反演控制设计[J].宇航学报,2010,31(3):769-773
[35]董朝阳,陈宇,王青,等.基于积分滑模的BTT导弹鲁棒反演控制律设计[J].航空兵器,2011(1):3-8.
[36]McFarlandMB,CaliseAJ.NeuralAdaptiveNonlinearAutopilotDesignforanAgileAntiAirMissile[C]∥AIAAGuidance,NavigationandControlConference,SanDiego,CA,1996.
[37]McDowellDM,IrwinGW,McConnellG.OnlineNeuralControlAppliedtoaBanktoTurnMissileAutopilot[C]∥AIAAGuidance,NavigationandControlConference,Monterey,CA,1993.
[38]魏喜庆.基于神经网络的BTT导弹自动驾驶仪设计[D].哈尔滨:哈尔滨工业大学,2007.
[39]姚成法.BTT导弹鲁棒自动驾驶仪设计[D].西安:西北工业大学,2007.
[40]晋玉强,史贤俊,王学宝.基于神经网络的BTT导弹鲁棒动态逆设计[J].系统工程与电子技术,2008,30(2):327-330.
[41]GoldsteinF,CsliseA.AdaptiveControlofVariableFlowDuctedRockets[C]∥AIAAGuidance,NavigationandControlConference,Gatlinburg,TN,1983.
[42]施雨阳,万自明,徐敏.冲压发动机导弹爬升轨迹/发动机一体优化设计[J].计算机仿真,2013,30(10):138-142.
[43]尚腾,谷良贤,赵吉松,等.冲压发动机导弹爬升轨迹与推力调节规律优化[J].飞行力学,2012,30(3):280-283.
[44]祁鹏,杨军,常亮,等.先进空空导弹最优中制导律研究[J].计算机仿真,2010,27(9):75-78.
[45]HalswijkW.OnlineDynamicFlightOptimisationAppliedtoGuidanceofaVariableFlowDuctedRocket[C]∥AIAAGuidance,NavigationandControlConference,Chicago,Illinols,2009.
[46]WilliamsDE,RichmanJ,FriedlandB.DesignofanIntegratedStrapdownGuidanceandControlSystemforaTacticalMissile[C]∥AIAAGuidance,NavigationandControlConference,NewJersey,SC,1983.
[47]XinMing,BalakrishnanSN,OhlmeyerEJ.IntegratedGuidanceandControlofMissileswithθ-DMethod[J].IEEETransactionsonControlSystemsTechnology,2006,14(6):981-992.
[48]MenonPK,SweridukGD,OhlmeyerEJ,etal.IntegratedGuidanceandControlofMovingMassActuatedKineticWarheads[J].JournalofGuidanceControlandDynamics,2004,27(1):118-126.
[49]段广仁,侯明哲,谭峰.基于滑模方法的自适应一体化导引与控制律设计[J].兵工学报,2010,31(2):191-198.
[50]薛文超,黄朝东,黄一.飞行制导控制一体化设计方法综述[J].控制理论与应用,2013,30(12):1511-1520.
[51]尹永鑫,杨明,王子才.导弹三维制导控制一体化设计[J].电机与控制学报,2010,14(3):87-91.
[52]EmeliyanoD,RubinovichE,MillerB.AdvancedGuidanceLawDesignBasedontheInformationSetConcept[C]∥IEEEConferenceonDecisionandContrl,Orlando,Florida,2001.
[53]JeonIS,LeeJI,TahkMJ.ImpactTimeControlGuidanceLawforAntiShipMissiles[J].IEEETransactionsonControlSystemsTechnology,2006,14(2):260-266.
[54]KimBS,LeeJG,HanHS,etal.HomingGuidancewithTerminalAngularConstraintAgainstNonmaneuveringandManeuveringTargets[C]∥AIAAGuidance,NavigationandControlConference,NewOrleans,LA,1997.
[55]PiniG,MarioJ,MosheG.SimpleGuidanceLawAgainstHighlyManeuveringTargets[C]∥AIAAGuidance,NavigationandControlConference,Boston,MA,1998.
[56]马克茂,马杰.机动目标拦截的变结构制导律设计与实现[J].宇航学报,2010,31(6):1589-1596.
[57]董朝阳,周雨.一种交班时刻性能最优的中制导律设计与仿真[J].系统仿真学报,2009,21(24):7873-7877.
[58]张靖男,赵兴锋,郑志强.BTT导弹的发展现状与趋势[J].飞航导弹,2006,(10):37-39.
[59]沈成林,彭双春,牛轶峰,等.BTT导弹制导律研究综述[J].国防科技大学学报,2011,33(2):106-112.
[60]NeslineFW,WellsBH,ZarchanP.ACombinedOptimal/ClassicalApproachtoRobustMissileAutopilotDesign[C]∥AIAAGuidance,NavigationandControlConference,NewYork,1979.
[61]龚惠明.使用冲压喷气发动机的导弹速度控制[J].战术导弹技术,1981,(4):68-75.
- 论合同管理在企业经济管理中的重要性
- 如何精准运用监督执纪“四种形态”
- 论如何做好国有企业纪检监察工作
- 提升企业监督执纪人员发现“四风”及违纪问题能力的思考
- 新时代深化信访改革化解信访矛盾的方式方法
- 标准化班组建设在新驿煤矿的探索和实践
- 农民工工资拖欠问题及解决办法研究
- 新时期军队离退休干部服务服务管理工作的问题及对策研究
- 创建“二二一三”工作机制全面推进监督执纪问责高质量发展
- 新常态下事业单位人事管理工作提升对策思考
- 子公司重大事项报告管理机制研究
- 事业单位编制管理问题及改进对策研究
- 行政精细化管理策略建议分析
- 论基层领导班子成员如何相处共事
- 工商管理在市场经济中的重要性分析
- 新形势下电力企业纪检监察工作的思考
- 做好人社工作 彰显人社担当
- 企业绩效管理在全面预算管理中的作用探讨
- “三大变革”引领企业转型升级
- 新形势下做好国有企业组织人事工作的思考
- 助力小人物的大梦想 培育天山下的追梦人
- 以先进企业文化促进混改企业优势发挥的探索
- 打造特色企业文化 引领实现追赶超越
- 有效利用新媒体提升企业形象
- 文化视角下的中国航天发展
- shiniest
- shinily
- shininess
- shininesses
- shining
- shinned
- shinning
- shin pad
- shins
- shin up/down
- shiny
- ship
- shipbuilder
- shipbuilders
- shipbuilding
- shipbuildings
- ship date
- shipdate
- shipful
- shiplessly
- shiplike
- shipload
- shiploads
- shipment
- shipments
- 判死
- 判死刑
- 判涣
- 判然
- 判然不同
- 判然两途
- 判状
- 判縣
- 判绝云泥
- 判罚
- 判罪
- 判花判决书
- 判若两人
- 判若两途
- 判若云泥
- 判若云渊
- 判若天渊
- 判若有别
- 判若水火
- 判若江湖
- 判若霄壤
- 判若鸿沟
- 判袂
- 判裂
- 判词