

摘要: 以运输型直升机为研究对象, 根据飞行品质规范ADS-33E的要求, 设计直升机俯仰、 滚转、 航向和高度通道的理想模型; 利用状态反馈方法, 针对不同高度和速度下的飞机模型, 设计显模型跟随控制律; 拟合包线内的控制器参数, 实现显模型跟随调参控制律。 最后, 系统仿真试验结果表明, 采用这种控制方案可以取得良好的控制效果, 验证了该方法的可行性和有效性。
关键词: 显模型; 控制律; 状态反馈; 飞行品质规范; 直升机
中图分类号: TJ765; V249文献标识码: A文章编号: 1673-5048(2018)02-0021-08
0引言
直升机与固定翼飞机相比有更复杂的气动特征与更特殊的飞行状态, 其稳定性较差且四个控制通道间存在轴间耦合[1]。 随着直升机执行的任务越来越复杂, 仅依靠人工操纵已十分困难 , 所以通过加入飞行控制系统的方法来改善其特性就显得非常必要。
在关于直升机飞行控制系统的研究中, 显模型跟随控制是一种比较成熟的控制方法, 同时针对多输入-多输出系统能够起到较好的控制效果。 显模型跟随控制的具体实现方法是, 首先建立一个和原有模型具有相似结构的理想模型, 然后根据飞行品质规范的要求来设计理想模型的参数, 再通过前馈和反馈控制, 使飞机的响应接近理想模型的输出。 这种方法通过设计理想模型来反映飞行品质的要求, 把二者紧密地联系起来; 同时理想模型的解耦设计, 可以抑制直升机各控制通道之间的耦合效应。
在设计的理想模型基础上, 采用状态反馈的方法, 通过改变原有系统的特征结构, 使得直升机的响应特性与理想模型类似; 同时设计前馈通道, 从而实现飞机的响应能够跟随理想模型的输出。 由于直升机操纵机构维数小于飞机状态量维数, 所以不能实现所有状态量和理想模型之间的跟随; 在这种情况下, 可以针对部分状态量设计显模型, 实现这部分状态量和理想模型的跟随, 同时将其他状态量和理想模型之间的误差控制在尽量小的范围内。 显模型跟随飞行控制律的设计与实现, 有效地改善了直升机的操纵性能, 具有重要的理论和工程价值。
1飞行品质规范ADS-33E的要求
针对直升机操纵性能的好坏, 美国军用直升机飞行品质规范ADS-33E规定了具体的评价方法[2-3]。
1.1对姿态响应的要求
飞行品质规范ADS-33E针对飞机的四个控制通道以及不同的飞行速度、 不同幅度的姿态响应、 不同的任务科目基元(MTE)和环境感知度(UCE)分别作出具体的要求。 本文以运输型直升机为研究对象, 选择除空战外的MTE且环境感知度良好(UCE=1), 主要介绍带宽及延迟时间、 阻尼比、 快捷性和轴间耦合4个指标。
收稿日期: 2017-08-31
作者简介: 刘宇亮(1989-), 男, 河北保定人, 硕士研究生, 研究方向是控制理论与控制工程。
引用格式: 刘宇亮. 显模型跟随飞行控制律设计与仿真[ J]. 航空兵器, 2018( 2): 21-28.
Liu Yuliang. Design and Simulation of Explicit Model Following Flight Control Law[ J]. Aero Weaponry, 2018( 2): 21-28. ( in Chinese)
带宽及延迟时间规定了频域的指标要求, 保证飞机在进行快速操纵时具有良好的跟随性和灵敏度, 相关度量值在控制系统波特图中定义, 如图1所示。
圖1带宽及相位延迟的定义
Fig.1Definitions of bandwidth and phase delay
图中定义了两种带宽值, 相位滞后135°时所对应的频率定义为相位带宽ωBWphase; 在穿越频率ω180所对应的幅值上留出6 dB的增益, 该处的频率定义为增益带宽ωBWgain。 如果响应类型为姿态指令姿态保持响应类型(ACAH)时, 带宽为相位带宽即ωBW=ωBWphase; 其他响应类型时, 取两者中的较小者为带宽ωBW。 延迟时间τp用以表示系统的相位滞后:
τp=Δφ2ω18057.3×(2ω180)(1)
其中: 2ω180表示2倍的穿越频率ω180; Δφ2ω180表示该频率处的相位与-180°差值的绝对值。
为了划分飞行品质的等级, 在二维平面内划定了不同的区域, 如图2所示。
图2飞行品质的要求
Fig.2Handling qualities requirements
以俯仰通道为例, 带宽及延迟时间的等级划分如图2(a)所示, 阻尼比的等级划分如图2(b)所示。 针对飞机姿态变化的快慢, 飞行品质规范根据快捷性指标作出评价, 即姿态角速度峰值与姿态改变量的比值。 以俯仰通道为例, 悬停与低速飞行状态下的等级划分如图2(c)所示, 前飞状态不作要求; 其中Δθpk和Δθmin分别表示俯仰角阶跃响应的峰值和最小值, qpk表示俯仰角速度的最大值。 飞行速度V≤23 m/s时为低速和悬停状态, V>23 m/s时为前飞状态。
1.2对总距操纵响应的要求
针对总距操纵, 飞行品质规范只在时域范围内作出了要求, 即飞行员对总距杆施加阶跃操纵后, 飞机的法向速度w应在1.5 s内达到0.81 m/s (等级l), 0.28 m/s (等级2), 0.20 m/s (等级3), 并且在5 s之内大致为一阶系统响应的形状。
1.3对轴间耦合的要求
针对总距操纵引起的偏航角耦合现象, 飞行品质规范划定了不同等级之间的界限, 如图2(d)所示。 其中, r1为对总距施加阶跃输入(航向操纵零输入)后3 s之内偏航角速度的第一个峰值, 如果3 s之内没有峰值, 则
r1=r(1)
r3=r(3)-r1r1≥0
r1-r(3)r1<0 (2)
其中: r(1)和r(3)分别第1 s末和第3 s末测得的偏航角速度, w(3)是第3 s末测得的法向速度。
航空兵器2018年第2期刘宇亮: 显模型跟随飞行控制律设计与仿真2直升机小扰动线性化模型
直升机小扰动线性化运动方程为
x·=Ax+Bu
y=Cx(3)
式中: A∈R9×9为状态矩阵, B∈R9×4为控制矩阵, A, B中的参数随飞行高度和速度的变化而变化, C∈R9×9为输出矩阵(取为单位阵I9×9); x=uvwθφψqprT为状态向量, 其中, u, v, w分别表示前向、 横向和法向速度; θ, φ, ψ分别表示俯仰角、 滚转角和偏航角; q, p, r分别表示俯仰角速度、 滚转角速度和偏航角速度; u=δeδaδrδcT为输入向量, 各分量依次表示纵向周期变距、 横向周期变距、 尾桨桨距和总距。
由于直升机模型中的参数随飞行高度和速度的变化而变化, 故选取不同高度H和速度V下的14个飞行状态点作为研究对象, 具体描述见表1。
表1设计的飞行状态点
Table 1List of designed flight state pointH/mV/(m/s)1003 0000 状态点1状态点821状态点2状态点931状态点3状态点1041状态点4状态点1151状态点5状态点1262状态点6状态点1372状态点7状态点14
3显模型跟随控制系统的设计
3.1显模型跟随控制原理
模型跟随控制分为隐模型跟随控制和显模型跟随控制, 后者与前者的主要区别是理想模型要作为一个组成部分体现在控制系统中, 并通过前馈矩阵和反馈矩阵修正理想模型和直升机状态量之间的误差, 从而达到飞机状态量能够跟随理想模型状态量的目的[4-7], 其原理如图3所示。
图3显模型跟随控制系统原理图
Fig.3Schematic diagram of explicit model following
control system
3.2显模型跟随控制律的设计
通过以上分析可知, 直升机的小扰动线性化动力学模型可以表示为
x·p=Apxp+Bpup
yp=Cxp(4)
式中: Ap∈R9×9为状态矩阵, Bp∈R9×4为输入矩阵, C∈I9×9为输出矩阵(单位阵); xp∈R9×1为状态向量, yp∈R9×1为输出向量, up∈R4×1为输入向量。
理想模型取为相同的形式, 表示为
x·m=Amxm+Bmum
ym=Cxm(5)
式中: Am∈R9×9, Bm∈R9×4和C∈I9×9分别表示理想模型的状态矩阵、 输入矩阵和输出矩阵; xm∈R9×1和um∈R4×1分别为理想模型的状态向量和输入向量。 定义跟随误差向量e=xm-xp,可得
e·=x·m-x·p= Amxm+Bmum-Apxp-Bpup=
Ape+(Am-Ap)xm+Bmum-Bpup(6)
由于直升机与理想模型状态量之间存在误差, 因此, 直升机的控制量up可以分为两部分: 一部分与状态量的误差相关, 当误差趋向于零时, 这部分的控制量也趋向于零; 另一部分与直升机的特性相关。
令up=u1+u2, 其中u1=Ke, 代入式(6)可得
e·=Ape+(Am-Ap)xm+Bmum-Bp(u1+u2)=
(Ap-BpK)e+(Am-Ap)xm+Bmum-Bpu2(7)
由上式可知, 若Ap-BpK稳定且(Am-Ap)xm+Bmum-Bpu2=0, 即可使跟随误差趋近于0, 实现飞机对理想模型的跟随。
将(Am-Ap)xm+Bmum-Bpu2=0转换并通过矩阵Bp的广义逆计算可得
Bpu2=(Am-Ap)xm+Bmum(8)
u2=B+p(Am-Ap)xm+B+pBmum (9)
其中B+p为Bp的广义逆, 将式(9)代入式(8)可得
Bp[B+p(Am-Ap)xm+B+pBmum]=
(Am-Ap)xm+Bmum(BpB+p-I)(Am-Ap)xm=
(I-BpB+p)Bmum(10)
由于um是独立于xm的, 故式(10) 两边必须都为0等式才能成立, 得到
(BpB+p-I)(Am-Ap)=0
(I-BpB+p)Bm=0 (11)
综上可知, 式(11)和Ap-BpK稳定是实现模型跟随的条件, 控制律为
up=u1+u2=Ke+B+p(Am-Ap)xm+B+pBmum(12)
将e=xm-xp代入上式可得
up=[B+p(Am-Ap)+K]xm-Kxp+B+pBmum(13)
令Kxm=B+p(Am-Ap)+K, Kxp=K, Kum=B+pBm可得
up=Kxmxm-Kxpxp+Kumum(14)
式中: Kxm和Kum是前馈矩阵; Kxp是反馈矩阵。
由于BpB+p≠I, 不满足式(11)条件, 所以不能实现飞机所有状态量和理想模型之间的精确跟随。
但是, 使用上述方法針对部分直升机状态量设计模型和控制器, 可以在这部分的范围内实现直升机状态量和理想模型状态量之间的误差接近为零, 其他状态误差保持在一个较小的范围内。
3.3状态反馈矩阵的设计
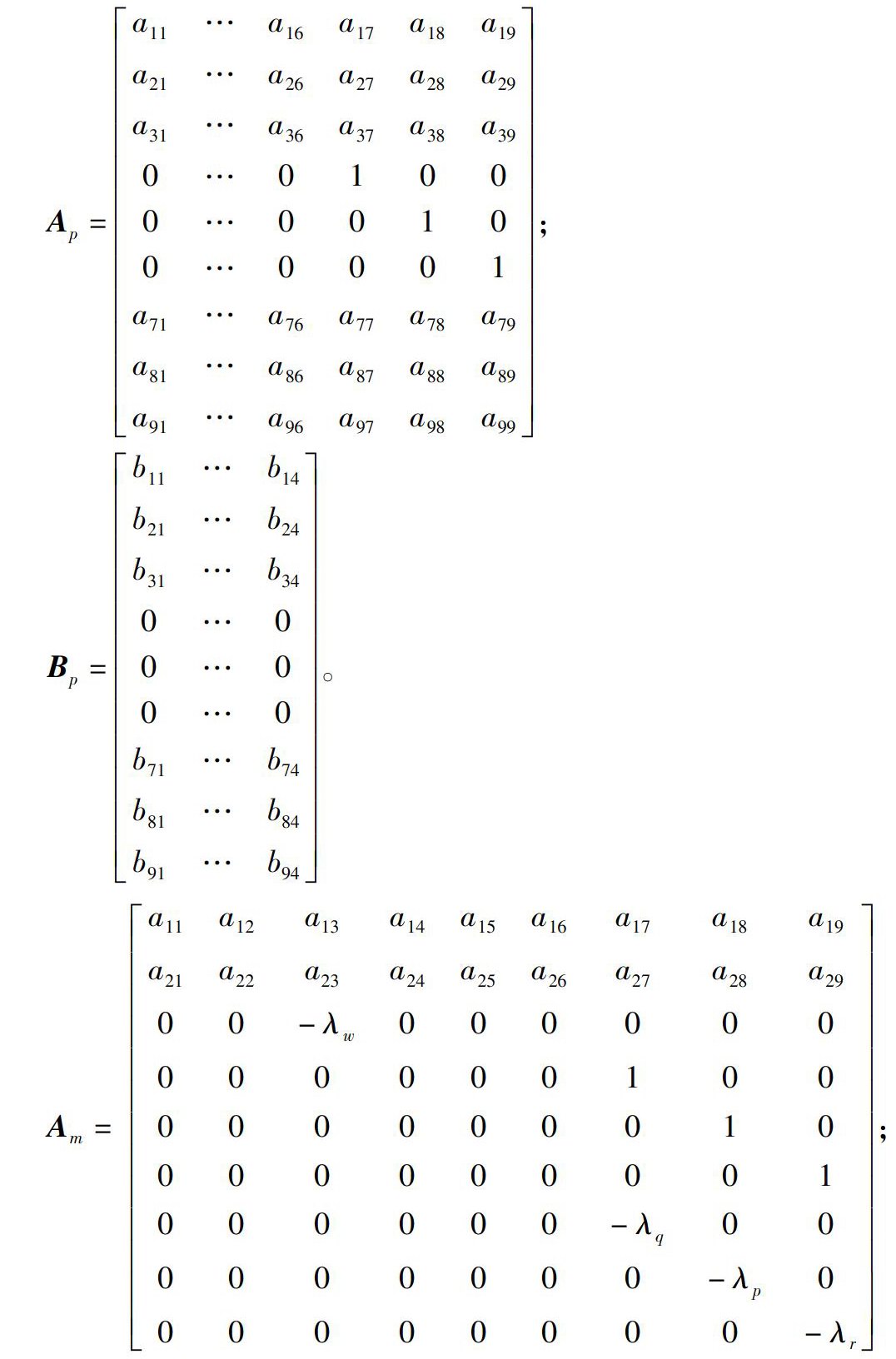
根据动力学计算可知, 直升机小扰动模型的状态矩阵Ap和输入矩阵Bp为
Ap=a11…a16a17a18a19
a21…a26a27a28a29
a31…a36a37a38a39
0…0100
0…0010
0…0001
a71…a76a77a78a79
a81…a86a87a88a89
a91…a96a97a98a99;
Bp=b11…b14
b21…b24
b31…b34
0…0
0…0
0…0
b71…b74
b81…b84
b91…b94。
上文中提到可以针对部分直升机状态量设计模型和控制器, 并在这部分的范围内实现直升机对理想模型的跟随。 考虑直升机输入向量up∈R4×1的维数为4, 状态向量中q, p, r, w分别体现出直升机在俯仰、 滚转、 航向和高度4个通道的飞行状态, 并且受输入量的直接控制, 故针对上述4个状态量设计模型跟随控制律。
通过矩阵Ap和矩阵Bp的形式可知, 直升机的角度θ, φ, ψ仅是角速度的积分值, 如果q, p, r能够跟随理想模型, 则角度θ, φ, ψ也可实现对理想模型的跟随。
为使模型简化, 各通道输入量到状态量的传递函数采用一阶模型, 以俯仰通道为例:
q(s)δe(s)=Kqλqs+λq(15)
将各通道的传递函数进行拉普拉斯反变换, 组成直升机模型Ap和Bp相应行的参数, 即可得出理想模型的状态矩阵Am和输入矩阵Bm:
Am = a11 a12 a13 a14 a15 a16 a17 a18 a19
a21 a22 a23 a24 a25 a26 a27 a28 a29
0 0 -λw 0 0 0 0 0 0
0 0 0 0 0 0 1 0 0
0 0 0 0 0 0 0 1 0
0 0 0 0 0 0 0 0 1
0 0 0 0 0 0 -λq 0 0
0 0 0 0 0 0 0 -λp 0
0 0 0 0 0 0 0 0 -λr; Bm=b11b12b13b14
b21b22b23b24
000Kwλw
0000
0000
0000
Kqλq000
0Kpλp00
00Krλr0。
选择矩阵Ap, Bp和Am的第3, 7, 8, 9行组成新的矩阵Apd, Bpd和Amd, 加入状态反馈回路K后, 如果飞机与理想模型的状态矩阵相同, 即
Amd=Apd-BpdK(16)
Bpd为方阵且可逆, 求出反馈矩阵K:
K=B-1pd(Apd-Amd)(17)
由此可得, Ap-BpK的第3, 7, 8, 9行与Am对应行的数值相等; 由于Bp的第4, 5, 6行为0, 所以Ap-BpK的第4, 5, 6行与Am对应行的数值也相等。 尽管Ap-BpK的第1, 2行与Am对应行的数值存在差异, 即飞机的前向速度u和横向速度v不能跟随模型中对应的状态, 但是由于飞机的俯仰角θ和滚转角φ可以跟随显模型, 且这两个量对前向速度u和横向速度v影响较大, 所以飞机和显模型输出之间u, v的误差能够保持在较小的范围内。
3.4显模型的设计
在显模型结构确定的基础上, 根据飞行品质规范的有关要求, 针对不同的飞行状态以及4个控制通道分别设计显模型的参数。
3.4.1直升机的响应类型
根据飞行品质规范的要求以及飞行员的操纵习惯, 确定俯仰、 滚转通道的响应类型为姿态指令姿态保持(ACAH), 航向、 高度通道的响应类型分别为速率指令方向保持 (RCDH)、 垂向速率指令高度保持 (RCHH)。 这样, 驾驶员通过前后压杆控制俯仰姿态角, 左右压杆控制滚转姿态角, 脚蹬控制偏航角速率, 总距杆控制法向速率。
俯仰通道与滚转通道具有相同的响应类型, 以俯仰通道为例。 由式(15)可知, 纵向周期变距δe到俯仰角速率q的传递函数为一阶环节, 且俯仰角θ为q的积分, 所以需要在俯仰通道加入一个反馈回路才能使響应类型为ACAH, 如图4所示。
图4ACAH响应结构图(俯仰)
Fig.4Schematic diagram of ACAH responding(pitch)
由此可得, 俯仰通道中纵向周期变距δe到俯仰角θ传递函数的标准形式为
Fθ(s)=θ(s)δe(s)=Kqλqs2+λqs+Kqλq=
ω2nθs2+2ζθωnθs+ω2nθ(18)
式中: λq=2ζθωnθ, Kq=ωnθ2ζθ。
由航向通道响应类型的含义可知, 驾驶员施加输入量后, 直升机产生正比于输入量的角速度; 输入撤销时, 直升机保持住接近于当前的方向。 这样航向通道中不需要加入反馈回路, 航向通道的传递函数为
ψ(s)δr(s)=Krλr(s+λr)s(19)
高度通道的响应类型为垂向速率指令高度保持(RCHH), 该通道的传递函数为一阶环节:
w(s)δc(s)=Kwλws+λw(20)
3.4.2阻尼比的要求
以俯仰通道为例, 其传递函数为二阶环节。 由飞行品质规范可知, 阻尼比ζθ>0.35即达到1级品质。 此外, ζθ还会影响到系统的快捷性, 因此需要全面考虑。 由于过阻尼系统(ζθ>1)的响应速度较慢, 对快捷性品质指标不利, 所以设计系统为欠阻尼或临界阻尼, 即0.35<ζθ≤1。
3.4.3带宽的要求
依据飞行品质指标的要求确定带宽参数时, 要考虑直升机的跟随情况, 这是因为直升机的响应速度较慢, 本身带宽比较窄, 如果显模型带宽过大, 将使直升机的响应速度难以跟上显模型的输出。 以俯仰通道为例, 参考1级飞行品质(如图2(a))的要求, 并考虑飞机的舵机、 助力器等执行机构对系统带来的影响, 所以确定1.2 rad/s<ωBWθ<5 rad/s。
俯仰通道的响应类型为ACAH时, 带宽ωBWθ为相位带宽, 即传递函数Fθ(s)相位滞后135°时的频率, 由式(18)可得
φ(ωBWθ)=-arctan2ζθωBWθωnθ1-ω2BWθω2nθ=-135°(21)
整理后可得
ωBWθ=ωnθζθ+ζ2θ+1(22)
将1.2 rad/s<ωBWθ<5 rad/s带入到式(22), 可得
1.2<ωnθζθ+ζ2θ+1<5(23)
3.4.4快捷性的要求
根据快捷性指标要求确定模型参数的取值范围。 以俯仰通道为例, 由于3.4.2节中有关阻尼比的取值是0.35<ζθ≤1, 所以需要分欠阻尼、 临界阻尼两种情况讨论二阶系统的响应。 这里假设直升机做大机动飞行时, 传递函数Fθ(s)的最大输入量为幅值Kθ=20的阶跃输入, 即δe(t)=Kθ·1(t)。
当ζθ<1, 即Fθ(s)为欠阻尼系统时, 俯仰角θ(t)和俯仰角速度q(t)的时域响应为
θ(t)=Kθ1-e-ωnθζθ t1-ζ2θsin1-ζ2θωnθt+
arctan1-ζ2θζθ(24)
q(t)=θ′(t)=Kθωnθ1-ζ2θe-ωnθ ζθtsin1-ζ2θωnθt(25)
由二阶欠阻尼系统的特性可知, θ(t)存在超调量, 且第一个极值为最大值, 第二个极值为最小值, 故通过求解极值点的方法得出θ(t)的最大值、 最小值。 角速度q(t)最大值的计算方法同上。
θpk=θ(t)t=π1-ζ2θωnθ=Kθ(1+e-ζθ1-ζ2θπ)(26)
θmin=θ(t)t=2π1-ζ2θωnθ=Kθ(1-e-ζθ1-ζ2θπ) (27)
qpk=q(t)t=11-ζ2θωnθarctan1-ζ2θζθ=
Kθωnθe-ζθ1-ζ2θarctan1-ζ2θζθ(28)
为方便设计, 将图2(c)中划分俯仰通道快捷性1级品质指标的曲线即实线, 近似为一条直线y=-0.018x+0.79即虚线, 如图5中所示。
如果点(θmin, qpk/θpk)位于该直线的上方, 快捷性即可达到1级品质, 代入式(26)~(28)以及Kθ=20可得
ωnθe-ζθ1-ζ2θarctan1-ζ2θζθ1+e-ζθ1-ζ2θπ>-0.361-e-ζθ1-ζ2θπ+0.79 (29)
图5快捷性近似线(俯仰)
Fig.5Approximate line of rapidity(pitch)
当ζθ=1, 即Fθ(s)为临界阻尼系统时, 俯仰角θ(t)和俯仰角速度q(t)的时域响应为
θ(t)=Kθ[1-e-ωnθt(1+ωnθt)](30)
q(t)=θ′(t)=Kθω2nθte-ωnθt(31)
由于θ(t)没有超调量, 根据快捷性指标的定义可知, θ(t)的最大值和最小值相等, 为响应的终值: θpk=θmin=limt→∞θ(t)=Kθ, q(t)的最大值: qpk=Kθωnθe-1。
进而, 可以得出俯仰角速度峰值与俯仰角峰值之比:
qpkθpk=ωnθe-1(32)
最大输入量的幅值Kθ=20, 根据俯仰通道快捷性的要求(图2(c))可知, 当θmin=Kθ=20时, 如果qpk/θpk>0.4即可达到1级品质; 考虑留出一定的余量, 取qpk/θpk>0.5, 根据式(32)可得ωnθ>1.36 rad/s。
3.4.5俯仰通道参数的确定
根据阻尼比、 带宽和快捷性品质的要求, 可以确定出俯仰通道的阻尼比ζθ和无阻尼自然频率ωnθ的取值范围。
(1) 阻尼比的要求: 0.35<ζθ≤1
(2) 帶宽的要求: 1.2<ωnθζθ+ζ2θ+1 <5
(3) 快捷性的要求:
ωnθe-ζθ1-ζ2θarctan1-ζ2θζθ1+e-ζθ1-ζ2θπ>-0.361-e-ζθ1-ζ2θπ+0.790.35<ζθ<1
ωnθ>1.36ζθ=1
在悬停/低速飞行状态下, 品质规范对俯仰通道的阻尼比、 带宽和快捷性3个指标作出了要求; 在前飞状态下, 对快捷性指标没有要求。 在ζθ和ωnθ组成的二维平面内, 画出两种飞行状态下, 满足对应1级指标要求的点, 如图6所示。
图6参数ζθ和ωnθ的取值范围
Fig.6Range of parameters ζθ and ωnθ
悬停/低速时, 为了使俯仰角的响应较为迅速且没有超调量, 参数取为ζθ=1和ωnθ=2, 对应可以得出Kq=1和λq=4; 前飞状态时, 俯仰角的响应速度可以适当降低, 参数取为ζθ=1和ωnθ=1, 对应可以得出Kq=0.5和λq=2。
3.4.6高度通道参数的确定
根据1.2节中法向速度的阶跃响应在5 s之内具有大致为一阶形状的要求, 确定高度通道的调节时间ts≤5 s。 根据式(20)可知其传递函数为一阶系统, 调节时间ts=3/λw≤5 s, 故确定λw=0.6。 针对法向速度w应在1.5 s内达到0.81 m/s可以满足1级品质指标的要求, 根据式(20)求出阶跃响应:
w(t)=Kw1-e-λwt(33)
代入t=1.5, λw=0.6到w(t)>0.81, 可得Kw>1.36, 这里取Kw=1.4。
4仿真验证及品质指标的评价
根据3.4节中确定的显模型参数, 可以得出理想模型的状态矩阵Am和输入矩阵Bm; 分别针对表1中14个飞行状态点处的直升机小扰动模型状态矩阵Ap和输入矩阵Bp, 根据式(14)和式(17)求出矩阵Kxm, Kum和Kxp的值。
搭建Simulink仿真模型, 驗证14个飞行状态下, 直升机状态量xp跟随理想模型状态量xm的情况, 并进行品质指标的评价。
4.1跟随性能的验证
以俯仰通道和高度通道为例, 针对表1中的前飞状态, 分别加入幅值为10的阶跃输入, 验证直升机跟随显模型输出的效果, 如图7所示。
图7跟随性能的验证
Fig.7Verification of following performance
由图可以看出, 直升机俯仰角θ和法向速度w的响应可以良好地跟随显模型的输出, 达到了模型跟随控制的效果。
4.2品质指标的评价
针对表1中的14个飞行状态, 分别验证俯仰通道的带宽和阻尼比指标, 以及总距-偏航耦合指标; 针对表1中的低速和悬停飞行状态, 验证俯仰通道的快捷性指标, 如图8所示。
图8飞行品质的评价
Fig.8Evaluation of handling qualities
由图8可以看出, 本文讨论的各项品质指标都达到1级品质的要求, 设计的显模型跟随系统达到了预期的效果。
5全包线控制律实现
为了实现全包线范围内的显模型跟随控制律, 以控制器Kxm, Kum和Kxp在14个飞行状态点处的参数为样本, 按照严格径向基神经网络的算法, 使用newrbe()函数分别得出上述矩阵中各参数的拟合曲面, 从而实现全包线范围内的调参控制律[8]。
以控制器Kxp中的参数Kxp(1,1)为例, 其拟合曲面连续平滑, 较好地反映出参数Kxp(1,1)在飞行包线范围内的变化趋势, 如图9所示。 从图中可以看出, 速度变化对Kxp(1,1)的影响较大, 高度变化对Kxp(1,1)的影响较小, 这反映出速度变化对直升机特性影响较大的客观事实。
图9参数Kxp(1,1)的拟合曲面
Fig.9Fitsurface of parameter Kxp(1,1)
6结论
本文使用状态反馈的方法, 设计显模型跟随控制律, 并且根据飞行品质规范ADS-33E中的有关规定, 设计了显模型的结构和参数, 最后, 利用径向基神经网络拟合控制器的参数。 结果表明, 在全部飞行状态下, 飞机的响应可较为准确地跟随显模型的输出, 飞机的各项品质指标都可以达到1级品质, 证明该方法可以达到较好的控制效果。
参考文献:
[1] 杨一栋.直升机飞行控制[M].北京: 国防工业出版社, 2015: 14-15.
Yang Yidong.Helicopter Flight Control [M].Beijing:National Defense Industry Press, 2015: 14-15.(in Chinese)
[2] Baskett B J.ADS33E Aeronautical Design Standard Performance Specification Handling Qualities Requirements for Military Rotorcraft[S].United States Army Aviation and Missile Command, 2000: 3-21.
[3] 荣枭录.直升机飞行品质设计方法研究[D].南京:南京航空航天大学, 2007: 41-44.
Rong Xiaolu.The Design Methods Research of Helicopter Flight Quality[D].Nanjing: Nanjing University of Aeronautics and Astronautics, 2007: 41-44.(in Chinese)
[4] 郑峰婴, 杨一栋.控制阵解耦的直升机显模型跟踪飞控系统设计[J].海军航空工程学院学报, 2007, 22(1): 119-124.
Zheng Fengying, Yang Yidong.Flight Control System Design of Explicit ModelFollowing for Helicopter Based on Control Distribution Matrix Decouple[J].Journal of Naval Aeronautical Ergineering Institute, 2007, 22(1) : 119-124.(in Chinese)
[5] 蔡伦, 李仁府, 闵山山.小展弦比无尾飞翼式无人机控制律研究与仿真[J].航空兵器, 2015(1): 31-34.
Cai Lun, Li Renfu, Min Shanshan.Research on Control Laws for a Tailless Flying Wing UAV with Low Aspect-Ratio and Simulation[J].Aero Weaponry, 2015(1): 31-34.(in Chinese)
[6] 陈龙胜, 姜长生.基于在线神经网络的无人机着陆飞行自适应逆控制器设计[J].航空兵器, 2009(3): 22-27.
Chen Longsheng, Jiang Changsheng.Design of Self Adaptive Inversion Flight Controller for UAV Landing Based on OnLine Neural Network [J].Aero Weaponry, 2009(3): 22-27.(in Chinese)
[7] 王文, 張保群, 董继鹏.基于自适应神经网络的导弹制导与控制一体化反演设计[J].航空兵器, 2012(5): 13-19.
Wang Wen, Zhang Baoqun, Dong Jipeng.Integrated Backstepping Design of Missile Guidance and Control via Adaptive Neural Network [J].Aero Weaponry, 2012(5): 13-19.(in Chinese)
[8] 李丹, 章卫国, 刘小雄, 等.基于模型跟随的神经网络PID飞行控制律设计[J].计算机测量与控制, 2009, 17(9): 1726-1731.
Li Dan, Zhang Weiguo, Liu Xiaoxiong, et al.Neural Network PID Design of Flight Control Laws Based on ModelFollowing[J].Computer Measurement & Control, 2009, 17(9): 1726-1731.(in Chinese)
Design and Simulation of Explicit Model Following Flight Control Law
Liu Yuliang
(China Airborne Missile Academy, Luoyang 471009, China)
Abstract: According to the handling qualities requirements of ADS33E, this paper takes a transport helicopter as the research subject, in which the ideal model on the conditions of the pitch, roll, heading and height channels are devised. With the method of state feedback, the explicit model following control law for the helicopter models at different height and speed is given. For the controllers parameters in flight envelop has been fitted, the explicit model following control law with adjustable parameters is achieved. At last, the simulation results show that the proposed control method can obtain the satisfied effect, and this method is feasible and effective.
Key words: explicit model; control law; state feedback; handling qualities requirements; helicopter1Polarization; interference rejection; phased array radar
- 广西典型岩溶区重金属高背景区农田土壤生态风险综合评价
- 基于多层LSTM的海兰褐蛋鸡产蛋率回归模型
- 亚热带-温带地区蝴蝶生态馆的营建方法与展望
- 基于光谱指数和机器学习的土壤有机质含量反演
- 基于NARX神经网络的粮食产量预测模型
- 基于SSD-MobileNet V1深度学习算法的药用植物叶片识别方法
- 针式抓取装置的结构设计和仿真分析
- 不同联合干燥方法对山药片质地结构及品质的影响
- 杠板归槲皮素提取工艺优化及体外抑菌效果
- 一株乳酸菌的分离鉴定及在苹果汁发酵中的应用
- 僵蚕醇溶蛋白质的优化提取及其指纹图谱研究
- 混合青贮对西兰花尾菜青贮发酵品质的影响
- 血鹦鹉温室工程化循环水养殖系统构建与应用
- 不同盐度对单环刺螠成活率及行为反应的影响
- 中药制剂止痢散对禽生产性能、肠道健康及大肠杆菌病的影响
- 2种海水臂尾轮虫品系生活史特征
- 白花蛇舌草种子萌发的光敏感性
- 增施不同氨基酸水溶肥对白菜生长的影响
- 添加矿质营养对蚓粪-蛭石育苗基质培育西红柿幼苗的影响
- 以中药渣有机肥为主要材料的番茄育苗基质筛选
- 盐胁迫对红花种子萌发及幼苗的生理效应
- 大马士革Ⅲ玫瑰蕾期净光合速率日变化特征及其与生理生态因子的关系
- 不同剂量伽马射线辐射处理丝瓜花粉的效应
- 不同透光率纸袋对红肉桃果皮色泽及类胡萝卜素组分的影响
- 土壤含水量对白芨与菌根真菌共生关系的影响
- processors
- processowner
- process owner
- process²
- process¹
- procharity
- prochiral
- prochirality
- pro choice
- prochoice
- pro-choice
- pro-choicer
- pro-choicers
- prochurch
- procity
- procivic
- procivilian
- proclaim
- proclaimed
- proclaimer
- proclaimers
- proclaiming
- proclaims
- proclamation
- proclamations
- 有时做婆婆,有时做媳妇
- 有时哭,有时笑
- 有时有会儿
- 有时有晌
- 有时省一口,缺时当一斗
- 有时觉得饱,有时觉得饿
- 有时隐没,有时出现,忽明忽暗的样子
- 有昊
- 有明
- 有明一代小楷第一
- 有明显的差异
- 有明白儿子,不如有明白媳妇
- 有明的光棍儿
- 有明第一手
- 有明(名)的光棍
- 有明(名)的光棍儿
- 有易
- 有易则易之,故守一而不变者,未睹治之至也
- 有星的夜晚
- 有星皆拱北,无水不朝东
- 有春日景色的河流
- 有显著德才的人
- 有晕的月
- 有景
- 有景不逛,白来一趟