雷铭达 徐汉斌

摘要:为设计出更适合老年人的助老站立装置。本文以助老站立装置中的辅助站立机构的设计为切入点,针对现有助老站立设备的不足,在深入分析老年人站立特征的基础上,参考人机工程学的人体尺寸,搭建了帮助老年人起身的辅助站立机构的三维模型,接着,根据老年人站立中的需求运用ADAMS软件对机构进行优化设计。改善了机构的传力效果,改进了坐板速度过快的不足。运用ADAMS进行参数化优化设计后的辅助站立机构能提供更为人性化的服务,该访法可为助老站立产品的创新及设计提供参考。
关键词:老年人?辅助站立机构?ADAMS?优化设计
中图分类号:TB472
文献标识码:A
文章编号:1003-0069(2020)08-0102-04
引言
随着社会发展和人类平均寿命的增长,我国老龄化程度不断加深。根据国家统计局发布的数据显示,2019年末,全国人口中65周岁及以上人口占总人口的12.6%61。老年人的健康成为社会日益关注的焦点问题,由于老年人身体机能随年龄的增长而下降,老年人日常起身愈发困难。在此社会背景下,助老站立设备的需求逐年增加,然而,如今市场上的助老站立设备在人性化方面存在欠缺,许多产品在辅助老年人站立时无法全面顾及到老年人站立时的需要,远远不能满足老年人使用需要,要想设计出适合老年人的助老站立设备,需要对老年人在站立过程中的需求进行深度分析,其中,辅助站立机构作为助老站立设备中的重要部件,在设计过程中根据老年人站立需求对机构进行优化设计成为其在设计过程中的一项重要工作。本文针对辅助站立机构进行优化设计,在人体站立特征分析的基础上,搭建辅助站立机构的三维模型,在老年人站立需求分析的基础上,运用ADAMS对机构的传力效果和运行速度进行了优化设计。
一、简述优化设计与辅助站立机构
(一)优化设计概述
本次设计通过使用ADAMS软件进行仿真分析和参数化优化设计,采用“设计需求研究-三维模型建立-虚拟样机仿真-参数化优化设计”的设计流程。首先分析人体站立特征与老年人站立时的特殊需求。接着,根据设计思路和人体站立特征搭建三维模型。之后将搭建好的模型导入到ADAMS软件中进行动力学仿真发现机构中存在的问题。最后,根据老年人站立时的特殊需求,有目的地对机构进行优化设计。
(二)优化设计在辅助站立机构设计中的应用
辅助站立机构是助老站立设备中的重要组成部分,其功能是在老年人站立的过程中提供辅助,减轻老年人站立时的负担,避免发生意外。由于老年人身体机能下降,无法提供较大的力以及难以承受较大的冲击,因此,辅助站立机构需要有较好的传力特性。此外,辅助站立机构还需要满足老年在站立时的各种需求。使用ADAMS软件不仅能够进行机构的动力学仿真,还能进行优化设计,通过优化设计一方面要改善机构的传力特性,让老年人可轻松使用,另一方面,要改变机构中零件的运动特性,防止其对老年人造成损伤。
二、老年人站立特征与需求分析研究
(一)人体站立时的基本特征
人体站立时的基本特征是指正常人在站立过程中普遍展现的特征,包括站立过程、足底压力的变化等方面。站立过程可分为3个阶段,第1阶段:髋关节活动,上身前倾,重心向前;第2阶段:臀部与座位分离,膝关节活动,腿部肌肉收缩,重心向上向前;第3阶段:身体在各关节协调配合下运动,重心到达最高点,并实现站稳[4]。老年人下肢力量,尤其是膝盖力量的减弱,是影响其不能有效站立的主因[5],因此老年人需要利用輔助站立机构帮助其完成站立过程,在实际运行的过程中,辅助站立机构运动与老年人站立过程相似会使老年人站立时更为舒适,膝关节负重更小。
在站立过程中人体足底压力的变化呈现出一定的规律。臀部尚未离开座椅时,足底压力的大小在200N附近,当臀部与座位分离后,足底压力在短时间内迅速升高并超过人体自身重力,在身体站稳前,足底压力一直在重力附近波动4。使用辅助装置完成站立的主要作用就是减轻下肢的负担,使足底压力在起立过程中缓慢增长,从而较好地保护下肢关节。
(二)老年人站立时的需求
老年人在衰老过程中,其肌肉力量会持续性下降,因此对老年在站立所需时间、站立过程中的速度等方面存在的特殊需求进行了如下的分析。在设计时还需要参考人机工程学中的人体数据,一方面使机构更符合老年人的身体特征,另一方面在进行仿真分析时更符合实际情况。
1.站立所需时间需求:助老站立设备主要针对的是站立困难和无法自主站立的老人,因此将深度老龄肌力下降最大49%[1]作为参考比例,进而得出深度老年人相对于年轻人只有51.9%的行动能力,因此,老年站立所需时间为年轻人的1.93倍,年轻人站立时需要花费的时间大致是2秒[5],老年人站立时需要花费的时间理论上应为3.96秒,考虑到使用助老站立设备会减缓站立过程,因此在设计过程中将老年人站立时所需要的时间设为5秒。
2.站立时的速度需求:起身时速度过快会导致老年人前倾摔倒,速度过慢会增加老年人膝盖的负重,一般情况下,老年人站立时身体重心的安全速度、阈值速度和危险速度为72.8mm/s,103.8mm/s,125.2mm/s[1]。
3.设计时参考的人体数据:助老站立装置属于l型产品并涉及人健康和安全,因此需要两个人体尺寸百分位数作为参考尺寸的上下限6。由于出现站立困难的老年人平均年龄大于人体尺寸数据中的最大年龄,对应的人体尺寸会发生变化,因此在设计时选用人体数据中最大年龄且数值范围较大的人体尺寸作为参考,所以在机构设计时将男性第99百分位尺寸和女性第1百分位尺寸作为参考尺寸的上下限。在进行动力学仿真时,为满足绝大多数老年人需求,人体总重量设定为满足第95百分位老年人群体所需要的75kg[10],按照人机工程学中的计算标准,上肢躯干及身体其他部位重量为体重的69.4%,上肢躯干重量设定为52.05kg[5]。
三、辅助站立机构设计及仿真分析
(一)设计思路
机构需要根据老年人站立特征与需求改变从动件的运动轨迹,因此,将辅助站立机构设计成可以通过改变构件尺寸就可以改变从动件运动的连杆机构。考虑到需要添加老年人根据自身情况调整坐板运动轨迹的功能,因此设计一个与扶手相连的滑动部件,在老年人站立过程中不断下压扶手可以使其向下滑动叨。此部件起到的作用一方面是充分利用老年人上肢力量和站立过程中躯干部分的重力帮助其完成站立过程并且调整坐板处的运动轨迹,另一方面是帮助老年人更快地调整重心,使其更快地调整好平衡,降低造成跌倒等事故的可能性。考虑到老年人站立时从臀部给予支撑对老人而言会更加舒适,因此采用了从臀部给老,人以支撑的辅助方式。此外,由于老年人上肢力量不足并且在站立初期老年人重心较低,无法使滑块运动,因此需要使用推杆提供额外的力辅助老年人站立。
辅助站立机构具体的工作流程分为三个阶段,第1阶段,老年人重心向上向前,此时帮助老年人站立的主要动力来源于推杆的力,老年人对把手的力只起一定的控制作用;第2阶段,老年人站立的同时使得其上身的重力不断加在把手上,为老年人向前向上运动提供额外辅助;第3阶段,老年人继续运动至完成站立,在这一阶段,坐板只提供很小的推动力。
在机构设计时,需要根据功能参考人体数据[6]。老年人站立后扶手恰好位于其手功能位置,因此需要参考的人体参数有手功能高。扶手需要设计在老年人可以握住的地方,因此需要参考上臂长和前臂长等人体尺寸,辅助站立机构整体设计在老年人前方帮助其完成站立过程,因此需要参考臀膝距。表1为设计机构所需的身体尺寸。
(二)三维模型的建立
根据人体站立特征以及设计思路的指导,结合现有的助老站立设备,确定了具体的设计方案,使用SOLIDWORKS软件建立三维模型,三维模型图如图1所示,辅助站立机构由六个杆件、一个推杆以及滑动部件组成。水平连杆最左端通过轴与坐板相连,滑动部件包含左右两个光轴滑块、扶手以及其他连接件。
(三)仿真分析
为探究设计完成的机构的工作性能,将模型导入ADAMS进行动力学仿真分析,包含以下步骤:
1.简化模型,辅助站立机构的主体由连杆组成,在实际运行时滑动部件在老年人对扶手力的作用下向下运动,因此将滑动部件简化为可滑动的滑块,将模型中使用的固定座和光轴删除,将推杆替换成可相对平移运动的杆件的组合,将坐板近似看作连杆一端的点。
2.导入模型,添加驱动,在铰接处添加转动副,在推杆和滑块处添加平动副。
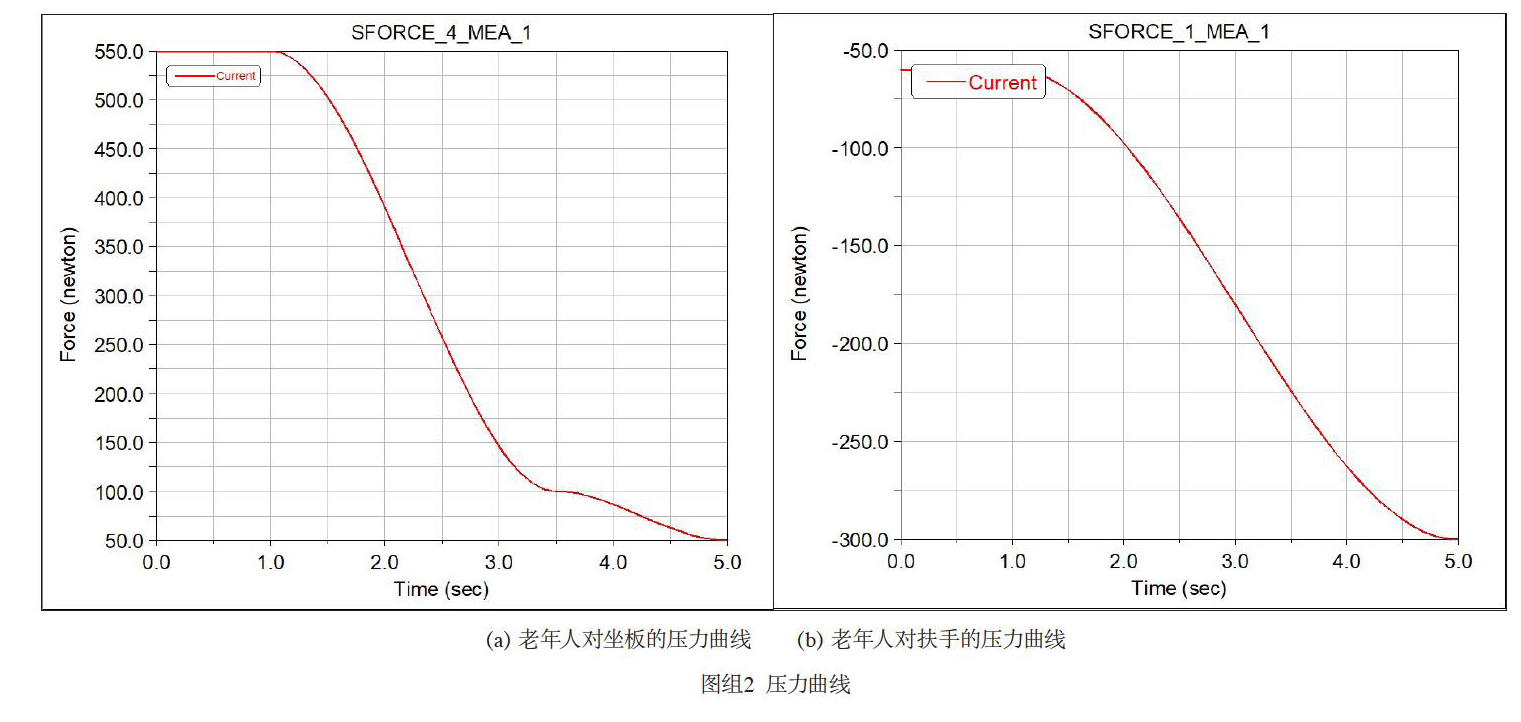
3.添加驱动,添加力。根据上述老年人站立分析可知,在坐板和滑块处各施加一个随时间变化的力可近似替代老年人对坐板的压力和老年人双手对于扶手的作用力,设置两处力的情况如图组2所示,此外,参考现有推杆数据,设置推杆替代部分对水平杆件的推力为1200N,其自身相对滑动速度为10mm/s。
考虑到老年人站立时的特殊需求,对与坐板相连接的点的速度进行测量并通过仿真绘制其速度随时间变化的曲线,如图3所示,通过曲线图可以看出,连接点的最大速度达到225mm/s,远超老年人站立时的危险速度,在实际运行时会造成老年人跌倒。此外,在仿真过程中还发现,施加在扶手上的力较小时并不能使滑块滑动,虽然老年人起身过程中上身的部分重力会施加在扶手上,但不同老人在体重、身体尺寸等方面存在较大差距,因此,需要通过优化设计使扶手上的力在更小时便可使用。
四、优化设计
优化设计一方面是要改善传力特性,让老年人施加较小的力就可推动滑块;另一方面,要通过优化设计降低H点的速度,避免速度过快将老年人摔倒,对机构进行优化设计要经历的流程如图4所示。
辅助站立机构中各铰接点的位置为其主要参数,本次分析中将各铰接点的横、纵坐标作为设计变量,设计变量的名称按顺序从DV_1排列至DV_9,完成后的参数化模型如图5所示。在H点和G点分别添加老年人对坐板的力与施加在滑块上的力,两处力的大小如图组3所示。
(一)改善传力特性的优化设计
因为G点处的力和H点处的力为固定的随时间变化的函数,因此,将测量目标设置为F点的横坐标,通过优化设计要使F点的横坐标在更短的时间内开始变化。
设计研究主要研究单个设计变量在特定范围内取不同值时虚拟样机性能的变化口。在功能分析的基础上参考人体数据确定各设计变量初始值与取值范围,之后将所有设计变量的绝对变化范围设定为士1,并进行设计研究,得到的结果如表2所示。
从表中可以看出,设计变量DV__7和DV__8在初始值处敏感度的绝对值相对较大,即POINTF_X和POINTF__Y的位置变化对虚拟样机的影响相对较大,因此将DV__7和DV__8设为主要设计变量,在之后的设计中只考虑主要设计变量对虚拟样机的影响。
试验设计主要研究多个设计变量组合变化时虚拟样机性能的变化。选取两个主要设计变量进行试验分析,图6为试验设计结果,两个设计变量在每次实验中的取值用表3表示。
根据试验设计结果可知,设计变量DV_7和DV__8取值越大曲线在2.5秒后变化越大,因为力随时间固定变化,因此更小的力就可使滑块开始运动,从曲线可以看出设计变量DV_7设置为349mm和DV_8设置为120mm时曲线变化最为剧烈。
(二)改善H点处最大速度的优化设计
本次优化设计将H点处速度的最大值设定为目标函数,并通过设计研究找出对目标函数影响较大的主要设计变量,设计研究结果如表4所示。根据表格可知,主要设计变量为DV_2和DV_4。
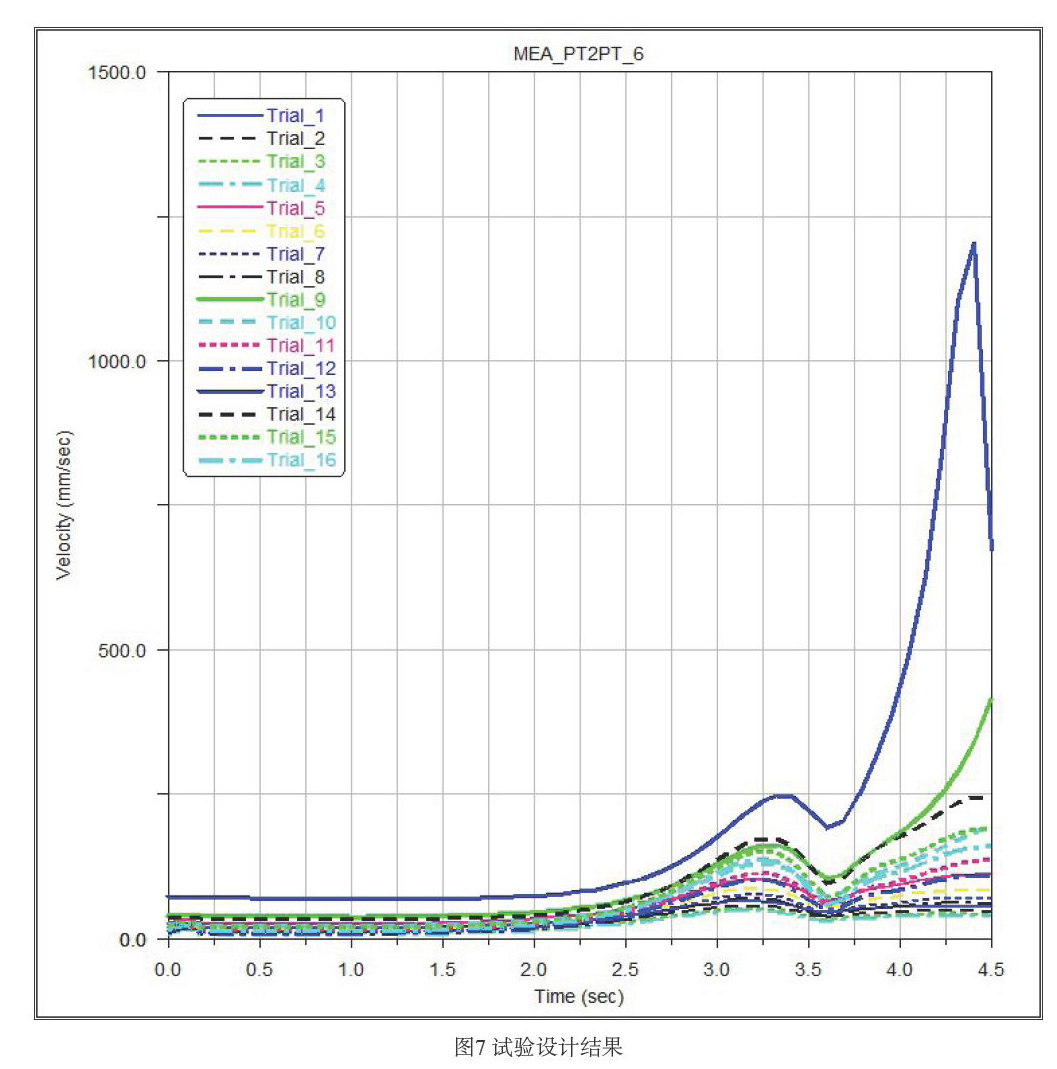
选取两个设计变量组合进行试验分析,图7为试验设计结果,将目标函数的试验设计分析数据结果用表5来表示。
根据试验设计结果和试验设计分析数據结果可知,当设计变量DV_2取值在14~56,DV__4取值在237.33~280.67,H点的速度小于老年人站立时重心的阈值速度,初步满足老年,人站立时在速度方面的需求,并缩小优化设计时主要设计变量的取值范围。
根据上述分析,在进行优化设计时,修改主要设计变量DV__2和DV_4的取值范围分别为14~56和237.33~280。此外,还需要创建约束来限制目标对象的数值范围,从而满足样机性能及要求21。本文中我们为了满足老龄站立的需求对H点速度的最大值创建了约束函数,通过优化设计得到优化后的H点的速度曲线如图8所示,优化结果如表6所示。
结论
辅助站立机构作为助老站立设备重要组成部分,是辅助老年人站立的主要功能件。随着助老站立设备需求的不断增长,作为核心部件的辅助站立机构的人性化设计越来越重要。本文根据人体站立特征,使用SOLIDWORKS搭建了一种辅助站立机构的三维模型,之后在老年人站立特殊需求的指导下,将其导入至ADAMS进行动力学仿真后发现装置在传力效果和坐板移动速度等方面需要被优化。运用ADAMS优化设计的过程中,在模型参数化后选取各铰接点的横、纵坐标作为设计变量,坐板移动速度的最大值和F点的横坐标作为目标函数,经过设计研究、试验设计、优化设计,最终确定了合适的参数,为辅助站立机构的设计提供了相关参考。
参考文献
[1]雷中贵,傅珈豫,周闯,王志雄老年人辅助站立椅运动安全性研究[J].软件,2018,39(10):121-125.
[2]周辉,秦宝荣,张冬冬,项秉乐,鲍家华,王郑兴老人椅辅助站立机构参数优化设计[J].机械传动,2016,40(02):91-94.
[3]李云基于ADAMS的夹紧机构优化设计[J].新技术新工艺,2010,(6):35-37.
[4]苏明亮,王新安,覃元元,等辅助人体站立系统的研究与设计[J].计算机技术与发展,2018,28(4);11-16.
[5]李姗姗人体起立过程建模与起立功能康复训练控制系统研究[J].黑龙江:哈尔滨工业大学,2009.
[6]邢嗣威,金信琴,人机工程学在老年人助行器中的应用[J].设计,2018,(3):113-114.
[7]崔腾飞,李浩源,王玥,等基于人體站立分析的辅助站立移位机研究[J].中国康复医学杂志,2018,33(1):86-89.
[8]山川,张强基于我国老年人需求特征的辅助产品设计研究[J].设计,2016,(3):106-107.
[9]刘兵,刘海军,丁雪芳健康中国背景下我国社区老年体育发展研究[J].智库时代,2020(12):12-13.
[10]付东辽.个人卫生护理机器人辅助站立系统设计[J].河南科技大学,2013.
- 同伴关系、学业成绩对中学生心理弹性的影响研究
- 基于核心素养下的高中历史深度教学研究初探
- 历史空间观念及其孵化策略
- 农村学校高一学生生物学习状况调查
- 打造中学语文与物理学科融合的支点
- STEM教育理念融入高中物理课程的研究与实践
- 高一新生学校生活适应现状的调查研究
- 中学公民道德教育的多元化实践研究
- 一种新的教学成绩考评方案
- 如何指导学生过好高中三年生活
- 高一新生学校生活适应的对策研究
- 浅谈高中班主任如何开展好主题班会
- 新课程理念下高中电磁学的教学策略研究
- 高中生物实验教学中学生创新能力的培养
- 基于化学学科核心素养的高考复习教学研究
- 创“理想课堂”,想师生共赢
- 高中数学走班分层方法的探索
- 高中数学立体几何翻转课堂实施途径探讨
- 基于微课的翻转课堂在高中数学教学中的应用研究
- 高中数学教学中“翻转课堂”教学模式的实践应用
- 关爱每个学生
- 初中信息技术教学中游戏化教学的应用探究
- 浅谈新课改下初中数学“数与代数”的教学研究
- 小学健美操教学中存在的问题分析及对策研究
- 论高中音乐新课标背景下演奏模块教学之特点
- discountable
- discount broker
- discountbroker
- discountbrokerage
- discount brokerage
- discounted
- discountedcashflow
- discounter
- discounters
- discount house
- discounthouse
- discounting
- discount loan
- discountloan
- discountmarket
- discount market
- discount price
- discountprice
- discount rate
- discountrate
- discounts
- discountstore
- discount store
- discount warehouse
- discountwarehouse
- r2014097200002174
- r2014097200002175
- r2014097200002176
- r2014097200002177
- r2014097200002178
- r2014097200002179
- r2014097200002180
- r2014097200002181
- r2014097200002182
- r2014097200002184
- r2014097200002185
- r2014097200002186
- r2014097200002187
- r2014097200002189
- r2014097200002190
- r2014097200002192
- r2014097200002193
- r2014097200002194
- r2014097200002195
- r2014097200002196
- r2014097200002197
- r2014097200002198
- r2014097200002199
- r2014097200002200
- r2014097200002201