摘要:提出一种桥梁防撞系统中的虚拟航道构建与船舶偏航检测方法。首先在桥梁通航孔安装摄像机,采集航道图像视频信息,然后对采集的视频信息进行处理,最后在视频图像上显示出虚拟航道,通过计算船舶到虚拟航道的距离判断轮船是否偏航。对有航标和没有航标情况用不同的方法构建虚拟航道,对不同的河道地形构建出适应实际地形的直线型、C型和S型虚拟航道,能够准确绕开障碍物,保证船舶航行安全。实验表明该方法具有较高的正确率,对提高桥梁和船舶航行安全具有重要意义。
关键词:桥梁防撞;虚拟航道;偏航检测
DOI:10.11907/rjdk.173169
中图分类号:TP319
文献标识码:A文章编号:1672-7800(2018)007-0189-04
Abstract:Theconstructionofvirtualchannelandthemethodofshipyawdetectionareproposedinthispaper.First,Camerasareinstalledinthebridgenavigationholetocollecttheaerialimageinformationofthenavigationchannel.Thenthevideoinformationisprocessed.Finally,thevirtualchannelisshownonthevideoimage.Bycalculatingthedistanceoftheshiptothevirtualwaterway,itispossibletojudgewhethertheshiphasdeviationandthedangerofhittingthepier.Thismethodcanbeusedtoconstructthevirtualchannelindifferentways.Fordifferentrivertopography,itispossibletoconstructalinethatadaptstotheactualterrain,c-typeands-typevirtualchannel,whichcanbeusedtoavoidobstaclesaccuratelyandguaranteethenavigationsafetyofships.Experimentsshowthatthemethodhashighaccuracyinspecificapplication,whichisofgreatsignificanceforimprovingnavigationsafetyofbridgesandships.
KeyWords:bridgeanti-collision;virtualchannel;yawdetection
0引言
隨着交通运输业的不断发展,大量跨海、跨江桥梁兴建[1]。这种桥梁本身所处的江、海域大都是繁忙的航道,其水流、波涛、风浪等情况复杂,不可避免地会有船舶碰撞风险[2-3],因此研究桥梁防撞的预警方法很有价值。
桥梁防撞设计方法分主动防撞和被动防撞[4]两种。主动防撞是通过对船舶的航行管理和航行轨迹干预,避免船舶撞击桥梁;被动防撞是通过桥墩安装辅助防撞设施抵御船舶撞击,避免撞击事故发生或降低受损程度。目前桥梁防撞问题研究大部分集中在被动防撞方面,主动防撞研究尚不多见,而一旦有船只偏离航道就可能导致船毁桥亡[5]。
通过航道检测实现预警的方法属于主动防撞[6],该方法目前主要应用于公路交通中的车道检测,水路交通中的航道与车道有着本质不同,航道没有类似公路的车道线可供检测,虽然主要大型桥梁航道两边都设有航标,但仍存在船撞桥的风险。因此,建立虚拟航道的方法实现船舶偏航检测,防止发生船撞桥事故显得尤为重要[7]。
1棋盘格标定法
1.1棋盘格标定算法
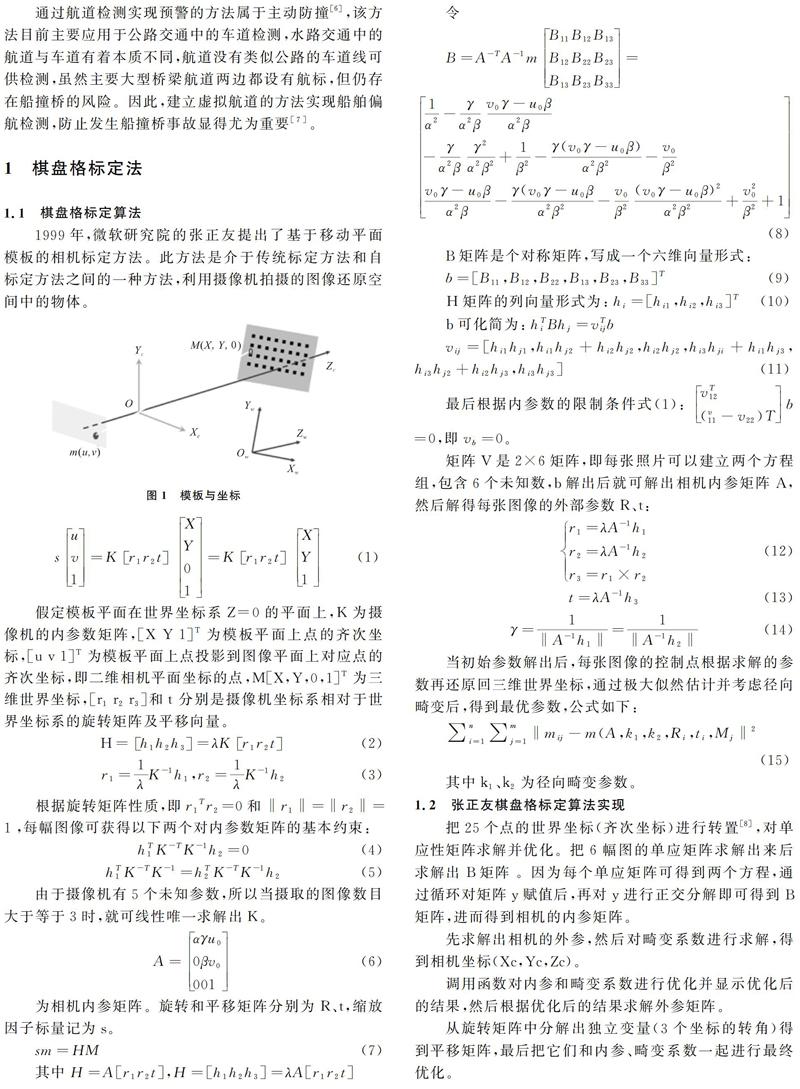
1999年,微软研究院的张正友提出了基于移动平面模板的相机标定方法。此方法是介于传统标定方法和自标定方法之间的一种方法,利用摄像机拍摄的图像还原空间中的物体。
1.2张正友棋盘格标定算法实现
把25个点的世界坐标(齐次坐标)进行转置[8],对单应性矩阵求解并优化。把6幅图的单应矩阵求解出来后求解出B矩阵。因为每个单应矩阵可得到两个方程,通过循环对矩阵y赋值后,再对y进行正交分解即可得到B矩阵,进而得到相机的内参矩阵。
先求解出相机的外参,然后对畸变系数进行求解,得到相机坐标(Xc,Yc,Zc)。
调用函数对内参和畸变系数进行优化并显示优化后的结果,然后根据优化后的结果求解外参矩阵。
从旋转矩阵中分解出独立变量(3个坐标的转角)得到平移矩阵,最后把它们和内参、畸变系数一起进行最终优化。
2虚拟航道构建
如图1,根据张正友棋盘标定原理,完成摄像机的标定与投影,得出两条虚线航道线的4个端子图像坐标[9-10]。从摄像机捕获视频帧,定义高斯背景模型,用第一帧创建高斯背景模型,使用当前帧更新高斯背景模型[11],将高斯背景模型的背景图像复制到事先定义的背景图像中[12],使用瞬时差分法获得不包含运动区域的当前帧并更新背景。当前帧与前一帧做差分并二值化处理,找到差分图像中的轮廓,得到轮廓的外接矩形,将面积小的矩形视为噪音抛弃,剩下的为运动目标,基于视频监控与分析系统检测船舶是否偏航[13]。
2.1航道两侧存在航标情况
对捕获图像进行自适应二值化处理和高斯模糊处理,对图像进行边缘检测[14],对图像进行轮廓检测并设定为只检测最外层轮廓,得到各航标的最外层轮廓,获取每个航标轮廓的第一个像素点坐标,利用点集的直线拟合函数对获取的坐标点进行拟合,在视频上显示由航标点近似拟合的虚拟航道线。
2.2航道两侧不存在航标情况
如图2,桥梁附近水域为直线型航道情况,利用绘图函数绘制连接两个点线段,从而在4个端点A、B、C和D之间直接绘制出两条直的航道线la和lb,构建出直线型虚拟航道,该虚拟航道的宽度设定为桥梁通航孔宽度。
如图3,桥梁附近水域地形较为曲折,在获得端点A和B间用贝塞尔曲线[15]拟合出虚拟航道线cc,在获得的端点C和D间用贝塞尔曲线拟合出虚拟航道线cd,虚拟航道线cc和cd的形状根据实际地形通过改变控制点坐标进行调节。为保证虚拟航道线cc和cd平行,坐标点A和C对应的坐标只有x坐标不同,坐标点B和D对应的坐标只有x坐标不同,对应的控制点也只有x坐标不同,且对应x坐标的差值应為通航孔在图像坐标系中对应的宽度。
对于S型河道,如图4所示,在A和B间用贝塞尔曲线拟合出虚拟航道线ce,在端点C和D间用贝塞尔曲线拟合出虚拟航道线cf,虚拟航道线ce和cf的形状根据实际地形通过改变控制点坐标调节[16]。
如果桥梁附近水域存在突出的水岸或小/微型岛屿等障碍物,如图5所示,则可在A、B之间直接绘制出直的虚拟航道线lg,在C和D之间用贝塞尔曲线拟合出虚拟航道线ch,ch的控制点坐标可根据障碍物所在位置适当调节。
3船舶偏航检测方法设计
3.1直线型航道船舶偏航检测
对于直线型虚拟航道,对视频帧自适应二值化处理、高斯模糊处理,对图像进行边缘检测,再对图像检测轮廓,得到标记运动船舶的矩形框轮廓,从而获得矩形框左上角顶点坐标(x,y),则矩形框左下角顶点A的坐标为(x,y+height),右下角顶点B的坐标为(x+width,y+height)。已知虚拟航道线的端点坐标可求出虚拟航道线的表达式,利用点到直线的距离公式可求出A到左虚拟航道线的距离和B到右虚拟航道线的距离,根据求出的距离判断船舶是否偏航。
3.2曲线型船舶偏航检测
对于曲线型虚拟航道,对视频帧进行自适应二值化处理、高斯模糊处理,对图像进行边缘检测,再对图像检测轮廓,得到标记运动船舶的矩形框轮廓,从而获得矩形框左上角顶点坐标(x,y),则矩形框左下角顶点A的坐标为(x,y+height),右下角顶点B的坐标为(x+width,y+height)。提取视频帧中与虚拟航道线相同的BGR值的所有像素点。本实例虚拟航道线为黄色,BGR值为(230,255,0),得到虚拟航道线轮廓,获取虚拟航道线轮廓的所有像素点坐标(xi,yi),利用勾股定理分别计算A(x,y+height)和B(x+width,y+height)到(xi,yi)的距离,取最小距离作为判断船舶是否偏航的参考值,见图6-图8。
4结语
本方案基于MicrosoftVisualStudio开发环境以及opencv函数库,主要完成的工作有:
(1)应用张正友棋盘格标定法进行摄像机标定,将给定水面上虚拟航道四端子从世界坐标转换到图像坐标,确定虚拟航道线端子坐标。
(2)实地考察,拍摄视频,对摄像机捕获的图像进行运动船舶检测。实时计算船舶与虚拟航道距离,判断船舶是否偏航。
(3)对航道两侧存在航标的情况,利用航标点拟合直线,构建出虚拟航道。对航道两侧不存在航标的情况,利用贝塞尔曲线构建出虚拟航道。
(4)通过计算船舶到虚拟航道距离,判断船舶在靠近桥梁的过程中是否偏航。
测试证明,本仿真系统可靠,能根据用户设定的通航口宽度、监测距离、实际的河道情况,绘制相应的虚拟航道,全天侯针对运动船舶的异常航行状况及时作出反馈,提醒船员采取措施。
参考文献:
[1]夏飞.桥梁防撞系统的发展[J].中国水运:理论版,2008(1):68-69.
[2]邓清文,孙中懿,王端,等.桥梁桥体主动防撞报警系统设计[J].仪器仪表用户,2016,23(12):16-19.
[3]王淑,任慧,云霄,等.通航桥梁主动防船撞系统及其性能分析[J].中国公路学报,2012(6):94-100.
[4]姜金辉,金允龙,潘溜溜,等.桥梁防撞研究技术与方法[J].上海船舶运输科学研究所学报,2008(1):23-56.
[5]刘新良.关于桥梁防撞装置结构型式的探讨[J].科技传播,2012(4):17-18.
[6]张峰.跨海大桥桥墩防撞技术[D].上海:同济大学,2007.
[7]罗勤.基于序列图像处理的桥墩防撞预警系统的研究[D].武汉:华中科技大学,2006.
[8]迟德霞,王洋,宁立群,等.张正友法的摄像机标定试验[J].中国农机化学报,2015,36(2):287-337.
[9]李莉.OpenCV耦合改进张正友算法的相机标定算法[J].轻工机械,2015,33(4):60-68.
[10]徐峰.虚拟航标在长江航道中的应用[J].水运工程,2012(3):119-123.
[11]陈银,任侃,顾国华,等.基于改进的单高斯背景模型运动目标检测算法[J].中国激光,2014,41(11):245-253.
[12]邱联奎,刘启亮,赵予龙,等.混合高斯背景模型目标检测的一种改进算法[J].计算机仿真,2014,31(5):378-392.
[13]张慧哲,陈洪,周良.基于视频监控技术的桥梁防撞系统[J].上海交通大学学报,2011,45(S1):93-96.
[14]王俊杰,黄心汉.一种对图像进行快速二值化处理的方法[J].电子技术应用,1998(10):15-16.
[15]王学春,尚继宏.三次贝塞尔曲线拼接模型的折线式等值线曲线化应用[J].测绘科学,2011,36(2):192-235..
[16]初晓军,刘宣华.基于贝塞尔曲线和路径的气象模式建模仿真[J].现代电子技术,2014,37(10):12-14.
(责任编辑:杜能钢)
- 银行对中小企业的信贷模式创新
- 提高企业资本运营水平的探讨
- 互联网金融风险及其监管研究
- 互联网金融背景下发展新型征信机构的思考
- 关于我国金融监管体制改革的研究
- 我国消费金融的风险防范与金融监管
- 我国国际金融话语权存在的突出问题及对策
- 互联网金融背景下商业银行经营模式的转型
- 杠杆率对商业银行稳定性的影响研究
- 中国货币非中性特征的实证研究
- 互联网金融模式及其对银行业的冲击略述
- “互联网+”模式下对商业银行发展的思考
- 管理会计在企业应用中存在的问题及对策分析
- 小微企业的财务管理问题及对策
- 会计职业道德研究
- 企业金融会计的风险防范及控制
- 对无形资产价值确定的探讨
- 浅谈企业会计成本核算的问题
- 试论会计谨慎性原则在资产核算中的应用
- 中小股份制银行财务管理研究
- 中小企业会计信息失真问题分析
- ERP在企业管理中的应用及风险管理研究
- 浅谈商业地产公司营销费用的管理及核算方法
- 浅析上市公司会计信息需求与供给
- 浅析上市公司自愿信息披露现状及规范途径
- bedroomed
- bedrooms
- bed's
- beds
- bedside
- bedsides
- bedsit
- bedsits
- bedsitter
- bedsitting room
- bedsore
- bedsores
- bedspread
- bedspreads
- bedtime
- bedtimes
- be dubious
- be due
- be duped
- be dying
- be dying/dropping like flies
- be dying for
- be dying for sth do sth
- be dying for to do sth
- bee
- 军哥
- 军售
- 军噪瓦坠
- 军团
- 军国主义
- 军国大事
- 军国大计
- 军国远图
- 军地
- 军地两用人才
- 军坊
- 军垒
- 军壁
- 军士
- 军士庶士
- 军士的武装
- 军士饱腹、战马蹦腾的欢乐情景
- 军声
- 军声大张
- 军声大振
- 军备
- 军备控制
- 军备竞赛
- 军多将广
- 军姐