
摘 要:设计与开发桌面式餐厅服务机器人,探讨其软件编程和硬件设计、材料选择,该餐厅服务机器人能实现迎客、点菜、娱乐等功能。
关键词:Arduino控制板;ARM开发板;JAVA;机器人;餐厅服务
DOIDOI:10.11907/rjdk.151169
中图分类号:TP319 文献标识码:A 文章编号:1672-7800(2015)007-0085-02
0 引言
服务型机器人是一种半自主或全自主工作的机器人,它能一定程度上代替人类完成服务工作,因此非常贴近人们的生活。人性化、智能化的餐厅服务机器人具有服务员特有的“人情味”,不仅能代替服务员的工作,还增强了互动性和娱乐性。
服务机器人在技术上已取得了很大进步,但在生活中未能得到普及,主要有以下两方面原因:一是此类机器人价位太高,普通餐厅难以承受;二是餐厅之间的竞争主要是服务的竞争,例如上菜效率高、为消费者考虑周全等,但是大多数机器人缺乏人性化服务。针对这一情况,餐厅服务机器人的发展和应用,还需要在某些功能上加以改进与提升。
1 餐厅服务机器人应用现状及功能需求
1999年,第一台餐厅服务机器人Alfred在加拿大诞生,该机器人显示出表情并与客户交流,但其语音识别正确率低,面部表情也不是很自然[1];2006年,香港从美国、加拿大引进了餐厅服务机器人,具有迎客、点菜、跳舞功能,有较好的科技感和互动性;2010年,山东济南开设了机器人餐厅,引进11台机器人,其可以沿轨道送菜,并可进行舞蹈等表演;2012年,香港第二家机器人餐厅中的服务机器人具有打招呼、炒菜、点菜、送菜、收账、打包剩菜和清洗消毒餐具等功能,很大程度上代替了服务员工作;2013年,哈尔滨机器人餐厅的18台机器人功能更加全面,包括煮水饺、煮面、炒菜、送餐、传菜、迎宾、收费等[2]。
目前餐厅服务机器人可以在一定程度上代替服务员工作,但其与顾客的互动还不够,且体型较大、价位偏高。结合餐厅服务机器人的市场需求,本文设计餐厅服务机器人的目标是:外观灵巧、娱乐性强、科技感强、人性化服务、可实现与顾客互动、适合推广普及。
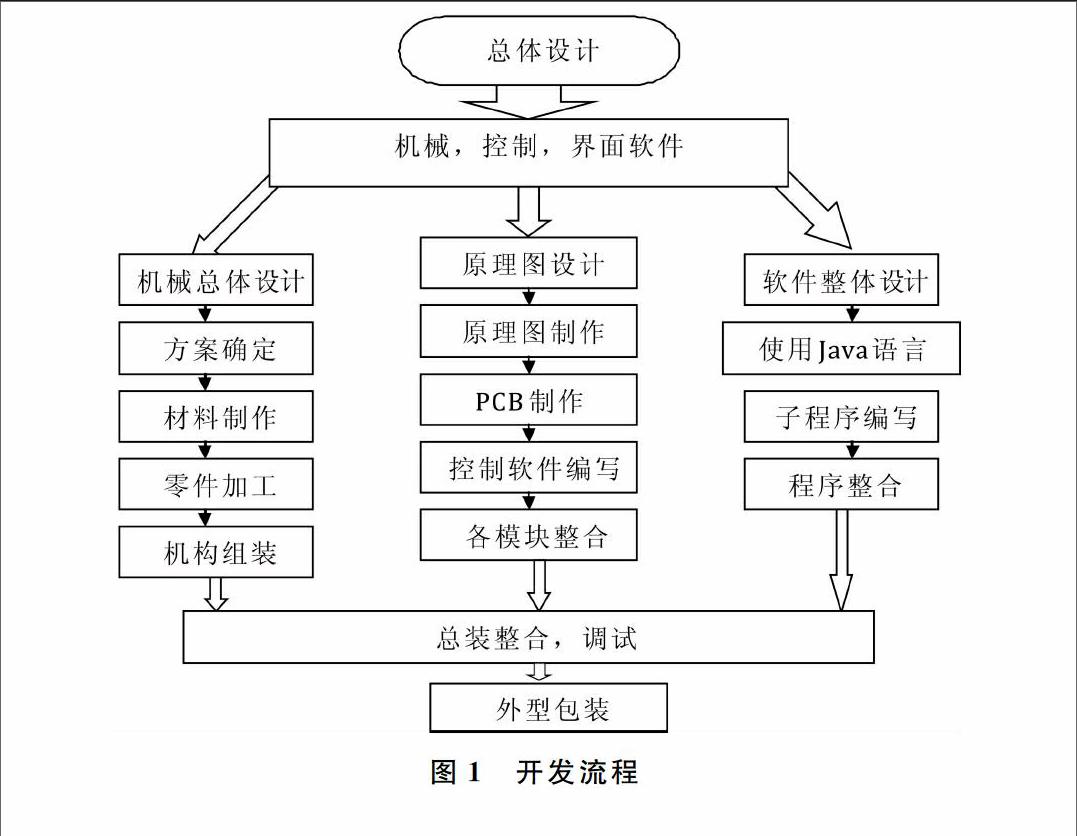
2 开发流程
开发流程如图1所示。
3 硬件设计
3.1 结构简介
主要使用Arduino控制板或ARM开发板进行硬件连接与软件的控制和输出。按钮、音量调节键、表情屏、语音输入输出设备、控制嘴巴闭合的舵机、手臂与腰部旋转的步进电机等均连接于ARM开发板或Arduino 控制板。当机器人发出语音时,ARM开发板发动舵机使嘴巴闭合;当机器人打招呼时,手臂可抬起与顾客握手,当其手臂感应到顾客的手时,手臂可前后轻摆。机器人打招呼时腰部可旋转,同时也可以手动旋转其腰部,整体结构如图2所示。
图2 机器人结构
3.2 材料选择
帽子和围着头部的部分采用食用性软硅胶,此材料属于环保硅胶的一种,无毒、无气味,弹性好,适用于机器人的装饰[3]。ABS塑胶具有良好的电镀性和耐热性,是头部、身体以及腿部外观材料的最佳选择,可用于制作机器人的“皮肤”。
3.3 关键部位机械结构
(1)下颌结构。下颌运动带动嘴唇闭合,因此将下颌绕水平方向的转动简化为嘴巴的4个自由度转动,由双摇杆机构实现。舵机半周转可带动下颌上下转动30°;下颌水平向上10°表示闭合,向下20°表示敞开,张开幅度为20mm[4],下颌机械结构如图3所示。当机器人发出语音时,Arduino控制板或ARM开发板将带动电机转动,实现“嘴动说话”的功能。
(2)手臂结构。本产品手臂内侧附有负温度系数热敏电阻器,此电阻器对温度敏感,不同温度下表现出不同电阻值,温度越高时电阻值越低。人体手指温度一般为28~37℃[5],在Arduino控制板或ARM开发板中输入一个固定的电阻值,一旦低于此值便启动步进发动机。为预防房间温度整体升高而被误判的情况,将光敏电阻安装在热敏电阻旁边,当光照变亮、电阻变小到一定值后电机将启动,带动手臂前后摇摆(见图4)。
(3)腰部旋转结构。安装一个轴承固定在腰部两旁,腿上安装一个轴承,用轴将两个轴承连接在一起。底部安装电机,步进电动机连接于Arduino控制板或ARM开发板上。因此,当机器人打招呼时启动步进电动机使腰部旋转。另外,腰部也可手动旋转,以便于顾客浏览屏幕内容。
4 软件系统设计
使用Java语言进行软件编程,根据顾客使用流程设计了4个模块:点菜、娱乐互动、上菜和其它辅助功能。
4.1 点菜
界面首先呈现菜品大类别,当顾客选择大类别后,进入详细菜品,界面右上角有“菜品清单”按钮,点击可查看已点菜品清单;右下角设置“点菜完成”按钮,点击进入“菜品清单”并弹出确认窗口,这时机器人会语音提示菜品数量和价格。对每个菜品呈现其菜名、价格和图片,在每个菜品左下角设置确定按钮,点击后该菜品即加入“菜品清单”;在每格菜品的右下角设置问号,点击后机器人将通过语音对此菜品进行介绍。
4.2 娱乐互动
等菜时呈现娱乐互动界面设置“伴奏音乐”、“新闻播报”等功能,可与顾客进行互动。
4.3 上菜
右下角有“菜来了”按钮,由服务员点击,点击后进入“菜品清单”,相应菜品被点击后,机器人将语音介绍菜品注意事项。待菜品上完,进入辅助服务,点击“没有纸巾了”、“需要添菜”即可提供相应辅助服务。右下角有“吃完了”按钮,点击后信号输出给服务后台,服务员便来结账收盘。
4.4 其它辅助功能
用餐完毕后,界面将显示“再玩一会”、“周边逛逛”、“直接走了”3个按钮,若点击“再玩一会”,程序将回到“等菜”的步骤,10分钟后界面自动弹回到主界面,“再玩一会”标签会变暗,不能再次点击;若点击“周边逛逛”,程序进入聊天界面开始语音帮助,顾客可说出目的地,将显示该地地图;若点击“直接走了”,机器人将询问是否需要乘坐出租车,若需要,程序则进入滴滴打车。此外,还可通过语音询问顾客对餐厅的建议,机器人将把顾客的语音录入储存。
顾客还可扫描其二维码进行外卖点餐。
5 结语
桌面式餐厅服务机器人可以更加人性化地为客户服务,增强科技感,提升用户体验。对于一些大型连锁餐饮店,桌面式餐厅服务机器人后期还可添加数据挖掘功能。通过机器学习自动进行数据分类、估计、预测、分组和聚类,餐厅可掌握不同客户的用餐喜好,提高服务质量。
参考文献:
[1] 宋章军.机器人的研制与开发[J].先进技术研究通报,2006,28(6):636-641.
[2] 李大庆.服务机器人:未来人类新宠[N].科技日报,2007-12-19.
[3] 周土芬,林静.硅胶在食品工业中应用现状[J].福建轻纺,2013(10):38-42.
[4] 机器人的表情介绍[EB/OL].http://wenku.baidu.com/view/eb1a70f7f61fb7360b4c65da.html.
[5] 郑桐,崔世钢,储健.基于远程脑服务机器人本体设计[C].制造业自动化与网络化制造学术交流会论文集,2004.
[6] 王炎,周大威.移动式服务机器人的发展现状及我们的研究[J].电气传动,2000(4):3-7.
(责任编辑:黄 健)
- 发展的力量来自员工
- 浅谈基于动态能力理论的企业人力资源管理战略决策
- 关于高校资产管理队伍建设的思考
- 在新的经济形势下传统的劳动密集型出口产业的发展转型
- 广西融资租赁行业的发展现状与对策分析
- 向成本宣战
- 区域自主创新与经济协调发展问题探究
- 人民币加入SDR后的机遇及挑战
- 县域经济供给侧改革研究
- 如何看待经济全球化趋势的深入发展
- 小额贷款保证保险风险防范法律制度研究
- 有限责任公司股东资格的认定
- 核算会计与财务报销存在的相关性研究
- 浅析让会计走进生活实际的方法
- 关于我国政府会计改革的研究
- 企业合并会计报表中存在的若干问题研究
- 企业应用环境会计的意义
- 加强农村中小学公用经费管理的思考
- 三位一体企业财务管理理论框架的构建研究
- 试论新形势下财务会计与管理会计的融合途径
- 企业财政预算管理中的问题及策略
- 国有资本效绩评价系统探讨
- 试析二甲医院财务会计信息化建设存在的问题及对策
- 探索加强应收账款管理实现营运资金快速回笼
- 关于做好当前泸西财政工作的思考
- predisastrously
- prediscern
- prediscerned
- prediscerning
- prediscernment
- prediscernments
- prediscerns
- predischarge
- predischarged
- predischarges
- predischarging
- prediscipline
- predisciplined
- predisciplines
- predisciplining
- predisclose
- predisclosed
- prediscloses
- predisclosing
- pre-disclosure
- predisclosure
- predisclosures
- prediscontent
- prediscontented
- prediscontentment
- 寡鹄单鸿
- 寡鹄孤鸾
- 寡鹄孤鸿
- 寡鹄寡鹤
- 寡鹄离鸾
- 寡鹄羁雌
- 寡鹤
- 寡默
- 寢
- 寢衣
- 寢門
- 寤
- 寤寐
- 寤寐不忘
- 寤寐思之
- 寤寐求之
- 寤怀
- 寤思
- 寤想
- 寤懷
- 寤梦
- 寤然
- 寤生
- 寤知
- 寤觉