摘要摘要:公路路面检测是公路养护管理的重要内容。基于物联网技术,结合图像分割和嵌入式技术,设计了一种便携式公路路面检测系统。该系统通过高清摄像头传感器采集路面图像,利用图像分割技术对路面图像进行分析和处理,发现路面病害。系统使用嵌入式技术实现,体积小、便于携带与安装,公路路面检测效率高,可以实现对公路路面的高效、智能检测。
关键词关键词:公路路面检测;物联网;图像分割;嵌入式系统
DOIDOI:10.11907/rjdk.1511234
中图分类号:TP319
文献标识码:A文章编号文章编号:16727800(2015)011007503
基金项目基金项目:国家自然科学基金项目(61502411); 江苏省自然科学基金项目(BK20150432); 江苏省高校自然科学研究面上项目(15KJB520034); 江苏省产学研前瞻性联合研究项目(BY2014108-20, BY2014108-29); 盐城工学院人才引进项目(2014038)
作者简介作者简介:王翠香(1982-),女,山东新泰人,硕士,盐城工学院信息工程学院助教,研究方向为无线传感器网络、网络编码;刘其明(1968-),男,江苏盐城人,硕士,盐城工学院信息工程学院副教授,研究方向为数据挖掘、图像处理。
0引言
近年来,随着我国国民经济的快速发展,我国的公路交通也取得了长足进步。截至2014年年底,我国公路总里程达到446万km。公路作为公共基础设施,其发展有力促进了人员和货物的流动,有力支撑国家的经济发展。如何对现有的公路进行科学、高效的管理和养护,成为摆在公路养护管理人员面前一个亟待解决的问题,而公路路面检测[1]是公路养护管理的重要内容。
路面是公路的表面,是公路的重要组成部分,路面的质量直接决定了公路的服务质量。路况较好的路面,能够提高公路通行效率,给驾驶人和乘客带来舒适的体验。路况较差的路面,不仅降低公路通行效率、降低使用体验,而且是交通事故的隐患,对公路使用者具有潜在危险。
公路日常管理养护需要定期对公路路基路面状况进行检测,以便给出相应的养护方案。若能在路基路面病害出现的初期将其发现并及时进行处理,公路的养护费用将大大降低,公路的使用寿命也能得到延长。因此,要对公路进行管理养护,对公路路面检测具有重要意义。
如何在不影响公路正常通行的条件下,科学、快速、高效地进行路面检测,为公路养护提供科学、可靠的公路养护方案,称为亟待解决的问题。目前,国内外已有一些针对公路路面检测的系统[24],但这些系统设备体积庞大、费用高,使用费时、费力等问题,甚至有些系统需要破坏公路路面结构。
为此,本文基于物联网技术[5],结合图像分割[67]和嵌入式技术,设计了一种便携式公路路面检测系统。该系统通过高清摄像头传感器采集路面图像,利用图像分割技术对路面图像进行分析和处理,发现路面病害。系统使用嵌入式技术,具有成本低、组网灵活、可扩展性好、维护费用低等特点,可以实现对公路路面的高效、智能检测。
1便携式公路路面检测系统架构设计
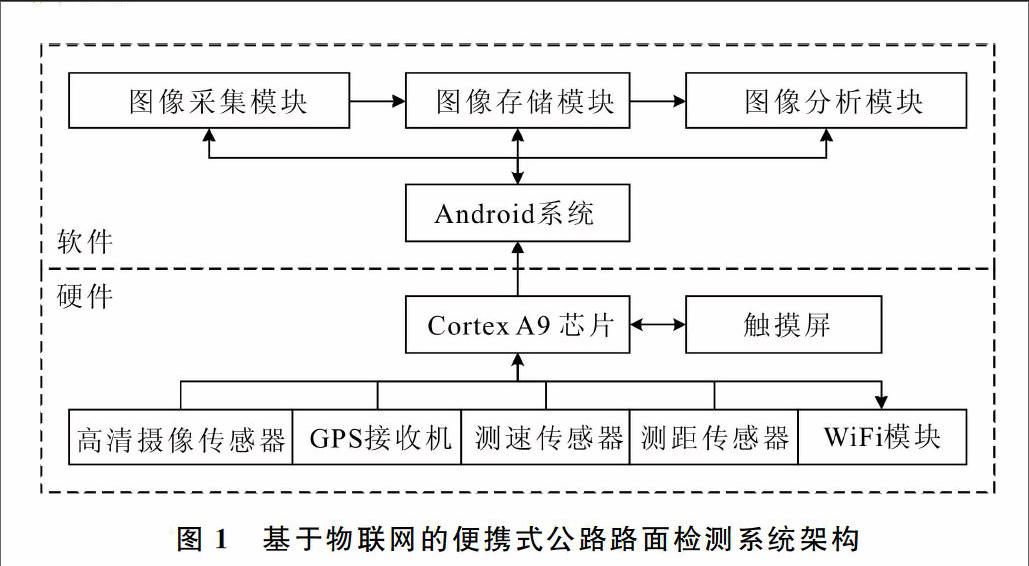
由于便携式公路路面检测系统采用嵌入式技术实现,因此从硬件和软件两个层次设计该系统。
硬件方面,核心处理器采用三星4核Cortex A9芯片Exynos 4412。为了采集公路路面的图像数据,采用以OV5640芯片为核心的500万像素摄像头作为路面图像采集传感器。图像采集传感器可以系统前进的过程中,将路面图片拍摄并存储在存储芯片中,以供后续开展路面图像数据的处理。
仅采集路面图像信息是不够的,还需要了解对应一帧图像的路面所在的地理位置。这样在对图像分析发现路面病害后,才能对应地知道该图像所对应的路面具体的地理位置,为开展路面修理维护工作指定方向。为此,系统中使用了一个以GNS7560为芯片的GPS接收机。该GPS接收机用于在拍摄一帧路面图像时,对应地获取该路面所处的GPS地理位置坐标。此外,硬件中还使用了WiFi模块,用于与其它系统之间的网络连接和数据通信,如图像数据的传输、分析结果的上报等。
在软件方面,使用了目前嵌入式移动设备广泛采用的嵌入式操作系统Android。使用Android系统后,系统的硬件管理和处理器调度工作交由Android系统处理,大大减少了软件开发的底层复杂度,使得系统开发人员可以集中精力开展针对公路路面检测的应用软件的开发。另一方面,目前Android系统在智能手机市场占有率较高,选择Android系统便于用户使用较少的时间就可以学会系统操作。系统应用软件分为3块:图像采集模块、图像存储模块和图像分析模块。
图像采集模块,负责周期性地拍摄路面图像数据,同时确保拍摄的图像没有对路面数据的重叠和遗漏。为此,需要结合设备前进的速度、摄像头角度、摄像头离地高度等参数,精确地计算并控制摄像头传感器模块的拍照时间间隔。图像存储模块负责对采集得到的路面图像数据进行存储和管理。图像分析模块对采集得到的路面图像数据进行基于图像分割技术的图像分析,为用户提供分析报告。
基于物联网的便携式公路路面检测系统架构如图1所示。
2便携式公路路面检测系统设计
便携式公路路面检测系统从核心功能进行划分,可分为路面图像采集子系统和路面图像分析子系统。
2.1路面图像采集子系统设计
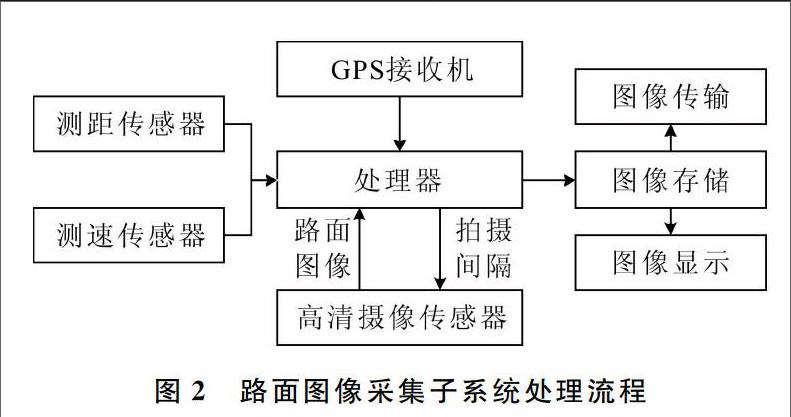
路面图像采集子系统的主要任务是负责路面图像数据的采集,其基本处理流程如图2所示。
处理器,即Exynos 4412芯片负责路面图像数据采集的核心控制。测距传感器测量摄像传感器到路面的高度,测速传感器测量当前摄像头传感器的前进速度。处理器根据算法,结合摄像传感器到路面的高度和摄像头传感器的前进速度,计算得到摄像传感器当前速度下,要实现无遗漏和无重复拍摄路面所需要的两次拍摄路面图像之间的时间间隔。高清摄像传感器拍摄到路面图像后,处理器从GPS接收机获取当前位置的经纬度信息,并将刚拍摄得到的路面图像信息和该位置的经纬度信息一起进行存储。本系统中将当前位置的经纬度信息,再加上当前拍摄时间,作为路面图像数据的文件名,即路面图像文件的文件名为“拍摄路面的经度+拍摄路面的纬度+拍摄时间”。拍摄得到的路面图像数据,将被存储到嵌入式系统中的存储芯片中,或是外扩的SD存储卡中。同时,所有存储的路面图像数据可以通过触摸显示屏向用户展现,也可以通过WiFi模块传递给后台服务器或相关应用程序。
在路面图像采集子系统中,摄像传感器拍摄时间间隔计算是关键。如果两帧图像拍摄的间隔时间太短,将会导致前后两帧路面图像有重叠路面数据,造成资源浪费,降低系统的存储和计算效率。如果两帧图像拍摄间隔时间太长,前后两针路面图像所拍摄的路面之间将有一段路面没有被拍摄到,从而导致系统数据不全面,遗漏部分路面图像信息的采集,导致最终的路面病害分析结果不全面、不可靠。
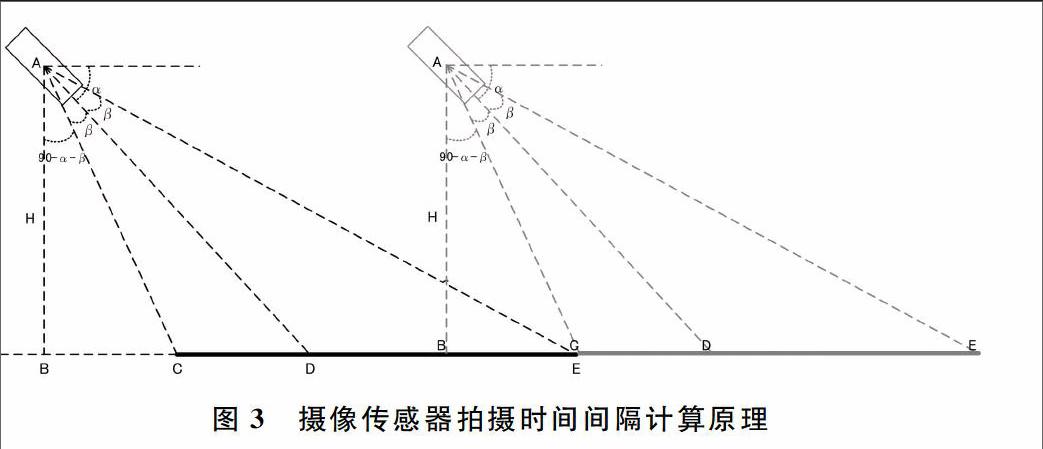
为此,给出摄像传感器拍摄时间间隔计算的原理,如图3所示。在图 3中,摄像头传感器处于位置A,其在地面的垂直投影点为B点。摄像传感器不是一个点摄像传感器,可以拍摄一个矩形的路面。摄像传感器的水平俯视角度为α,其上下最大范围视角线到中心视角线的角度都为β。摄像传感器中心视角线与路面的交点为D点,向下最大范围视角线与路面的交点为C点,向下最大范围视角线与路面的交点为E点。则最终摄像传感器在A点位置,可以拍摄到的路面长度范围为CE。
在系统实际运行过程中,摄像传感器和整个嵌入式路面检测系统是在路面上以一定速度移动的。假定摄像传感器移动到位置A′点,对应在A′点可以拍摄到的路面长度范围为C′E′。如前所述,为了使摄像传感器前后两帧路面图像数据对路面的拍摄不遗漏、不重叠,最理想的情况是C′点和E点重合,这样可以保证前后两次拍摄的路面图像无重叠、无遗漏。
下面计算摄像传感器由A点到A′点所需要的时间间隔。tan(90-α+β)=BE/AB,则BE=AB*tan(90-α+β)。而AB为摄像传感器离地高度,可通过测距传感器得到,假定AB长度为H,则BE长度为H*tan(90-α+β)。同理,tan(90-α-β)=BC/AB,则BC长度为H*tan(90-α-β)。由于摄像传感器在移动过程中相关角度不变,则相应的三角形的大小应该全等,如三角形ABC和三角形A′B′C′应该全等,则BC=B′C′。于是,有BB′=BE-B′C′=BE-BC=H*tan(90-α+β)- H*tan(90-α-β)=H[tan(90-α+β)- tan(90-α-β)]。AA′B′B构成矩形,则摄像传感器由A点移动到A′的距离AA′=BB′,则AA′=H[tan(90-α+β)- tan(90-α-β)]。假定系统中测距传感器测得摄像传感器的运动速度为v,则摄像传感器由A点运动到A′点所需时间为t=H[tan(90-α+β)- tan(90-α-β)]/v。此处计算得到的t,也就是摄像传感器拍摄时间间隔。
在系统实际测试中,t的取值可以依据H[tan(90-α+β)- tan(90-α-β)]/v精确计算得到。但是为了避免遗漏部分路面的数据,t的取值可以小于H[tan(90-α+β)- tan(90-α-β)]/v,但不能大于H[tan(90-α+β)- tan(90-α-β)]/v。因为t取值大于H[tan(90-α+β)- tan(90-α-β)]/v后,将会导致部分路面信息采集的遗漏,从而影响最终图像分析结果的全面性。而t取值小于H[tan(90-α+β)- tan(90-α-β)]/v虽然会引起采集的前后帧图像信息的重叠,但不会影响最终图像分析结果的全面性。
2.2路面图像处理子系统设计
路面图像处理子系统负责对路面采集子系统采集得到的路面图像数据的分析和处理,发现路面图像中存在的线状裂缝、网状裂缝等路面病害,并给出路面图像分析结果。路面图像处理子系统的处理流程如图4所示。
路面图像处理的核心是使用图像分割算法对路面图像数据进行分割处理,具体是使用现在较为流行的基于阈值的图像分割算法。
基于阈值的图像分割算法首先要解决阈值计算的问题。阈值计算方法是:选取M帧路面图像数据,求出灰度图像均值图像,然后找出均值图像的最小灰度值,将该最小灰度值减1即可得到阈值T。
由于摄像传感器采集的原始路面图像时彩色图像,在进行图像分割前,需要对原始路面图像数据进行灰度化处理,即将彩色图像转换为黑白灰度图像。假定一帧RGB彩色图像,在像素点(i,j)处的RGB亮度分量分别为R(i,j)、G(i,j)、B(i,j),依据Gray(i,j)= 0.1R(i,j)+0.6G(i,j)+0.3B(i,j)计算得到灰度图像在(i,j)处的灰度值Gray(i,j)。
在得到灰度图像后,结合阈值T,依据g(x,y)=1f(x,y)>T0f(x,y)≤T对图形进行分割处理。即对灰度值大于阈值T的像素点的灰度值置为1,否则置为0。最终可以得到2值分割图像,即路面图像数据的处理结果。
3结语
本文提出基于物联网技术的便携式公路路面检测系统。该系统使用高清摄像传感器采集路面图像数据,利用图像分割技术对路面图像数据进行分析和处理,以发现路面存在的各种病害。系统采用嵌入式技术实现,具有体积小、成本低、检测效率高的特点,可以应用于各种路面情况的快速、高效的监测,可以提高公路养护管理水平,减少养护管理成本,提高养护管理效率。
参考文献参考文献:
[1]李强,潘玉利. 路面快速检测技术与设备研究进展及分析[J].公路交通科技,2005,22(9):359.
[2]张红春. 高速公路路面裂缝检测技术应用[J].筑路机械与施工机械化, 2013,10(8):358.
[3]高建贞,任明武,杨静宇. 路面裂缝的自动检测与识别[J].计算机工程,2009,29(2):14950.
[4]彭勇沉,孔庆峰.公路路面管理系统GIS设计[J].软件导刊, 2008,7(3):1213.
[5]孙其博,刘杰,黎羴,范春晓,孙娟娟.物联网:概念、架构与关键技术研究综述[J].北京邮电大学学报,2010,33(3):19.
[6]宋麦玲,杨小红.图像分割技术研究[J].软件导刊,2007,6(7):8081.
[7]全爱国.用于图像分割的边缘检测技术研究和分析[J].软件导刊,2011,10(7):152153.
责任编辑(责任编辑:陈福时)
- 信息技术在建筑工程管理中的应用探讨
- 谈建筑施工中混凝土的质量检查
- 代建单位角色定位研究
- 企业中层管理者绩效考核问题及对策
- 企业内部审计风险的管理与防范措施
- 基于供应链的企业采购管理策略研究
- 刍议员工持股计划对我国国企经营绩效影响的研究
- 浅析中小企业绩效管理的问题及对策
- 大数据战略 21世纪企业管理的新风向标
- 浅析如何加强企业资金预算管理
- 铁路企业全面预算管理现状分析及对策
- 在新形势下如何做好电网企业保卫工作的思考
- 配网工程常见问题及解决策略
- 浅谈抗疲劳耐冲击轧辊应用
- 总装生产过程中成品保护方法的优化
- 动车组轮对踏面磨耗浅析及解决构架振动措施研究
- 140mm反钢筋混凝土聚能战斗部结构威力设计
- 消防工程的实施建议
- 城市集中供热热水管网布局存在的问题与对策之探讨
- 浅析招标过程中的风险识别和防范
- 石油工程地面工程施工技术研究
- 高强混凝土在民用建筑工程中的应用研究
- 探究建筑工程监理的难点及有效应对策略
- 浅析煤炭企业思想政治建设中存在的问题及对策
- 钢企承压盼突围,内控落实夺先机
- gander
- gobbledygook, gobbledegook
- gobbles
- gobble-up
- gobble up/down
- gobbling
- go-begging
- go belly up
- go/belong
- go/be on (at sb) (about sth)
- go berserk
- go-better
- go-between
- gobetween
- go between
- go be tween's
- go-betweens
- go-beˌtween
- go blank
- goblet
- gobletful
- goblets
- goblin
- goblinesque
- goblins
- 紧促
- 紧俏
- 紧俏商品
- 紧俏货
- 紧俏车型
- 紧俏饭
- 紧关里
- 紧凑
- 紧凑同位
- 紧切
- 紧卷
- 紧口
- 紧口坛儿——装得多,倒得少
- 紧句
- 紧喉
- 紧喉嗓音
- 紧喉音
- 紧固件
- 紧夹板
- 紧媚
- 紧密
- 紧密勾结
- 紧密团结
- 紧密地陪伴
- 紧密层