陈斌+郑江龙+勾学荣+朱永刚
摘要:对获取户外位置的需求随着对基于位置的服务(LBS)需求的增加。本文研究的是基于接收信号强度(RSS)的蜂窝移动网络基站指纹定位的问题。首先,我们创建一个移动位置信号空间数据库作为指纹库。然后我们引入一个新的定位方法来提高定位的精度,命名为时空定位方法。此方法同时结合了空间定位方法和时间定位方法的优点。
关键词:定位;L滤波;指纹定位;接收信号强度
中图分类号:TN919.72 文献标识码:A DOI:10.3969/j.issn.1003-6970.2015.02.013
0 引言
随着蜂窝电话网络的飞速发展,基于LBS的应用已广泛地被人们所开发和研究。例如,紧急呼叫的位置定位,寻找朋友以及照片的地理位置标记等等。
提供LBS的前提是要获取移动终端的位置。多年来许多方法和技术已经很好地解决了位置估算问题,LF技术就是其中之一。只需在现有的基础网络设施上即可完成LF技术的运用,不需要增加任何额外的部署成本。LF技术中提到的指纹指的是一个位置信息的记录,它包括GPS位置信息、接收小区的标识符(CI)及RSS值等。
现已存在很多基于LF定位技术的文献,如KNN、SVMTM以及CS等,LF技术的基础是机器学习算法,机器学习算法研究的成熟运用也十分有利于LF定位的发展,如SVM算法的广泛运用。
上述所有定位方法仅从空间的角度来进行用户的位置定位。然而在用户的连续呼叫期间,其位置信息和时间具有一定的相关性。因此,如果能有效地利用用户相关的时间信息将对用户位置的定位带来更多有价值的信息。
本文提出了一种将空间定位和时间定位结合到一起的定位方法,该定位方法较单一的空间定位法有更高的定位精度。其中,时间定位方法采用的是L滤波技术,而空间定位方法则是基于标准的KNN算法。
最后,我们提出了启发式算法规则来有效的结合这两种定位结果。
1 空间定位方法
在本节中,我们介绍了空间定位方法的过程。空间定位方法是通过标准的KNN算法实现的。KNN算法基本原理的实现是通过寻找K个最临近的训练样本,然后将这些邻近样本的标记平均值设置为该测试样本的属性值。
在定位系统中,首先在信号空间中计算出要待测试的样本与所有被选定的训练样本之间的欧式距离。然后根据欧氏距离对所有训练样本进行排序,选择在信号空间中距离待测样本最近的K个样本。最后,通过加权这K个训练样本的位置获得该待预测样本的位置。我们可以根据经验选择一个合理的K值。
虽然基于信号强度的KNN算法十分简单,但是通过它可以得到足够好的定位精度。该算法选择k个邻近待测接收信号强度的参考点,由欧式方法计算出它们的距离。
如果我们在测试点能够中从N个接入点(APs)获得RSS:
2 时间定位方法
L滤波是一种用连续函数逼近离散点的平滑方法,它的基本出发点是目标一般都是一个具有一定质量的物体,于是,我们认定它在运动时应满足以下条件:
(1)它的位置不能突变,也就是说运动轨迹一定是连续的
(2)它的速度也不能突变,也就是说运动轨迹的时间导数也一定是连续的
(3)它的加速度不可能非常大,也就是说运动轨迹的二阶导数必须具有一定的上下限
而且,作为L法还应该特别强调的是,对于任意形式的坐标,或物理连续的、有意义的一种抽象的维,当以其中的某一维观察时,这样的假设都认为是合理的。这样,一种近似的目标运动模型是把它看成是分段相连的匀变速运动。于是,从离散的观察点出发,平滑所得到的结果却是连续的时间函数,这是与其他的平滑方法根本不同的。正是由于这样的机理,L法滤波不仅对观察进行了平滑,在必要的时候,它还可以进行良好的内插。
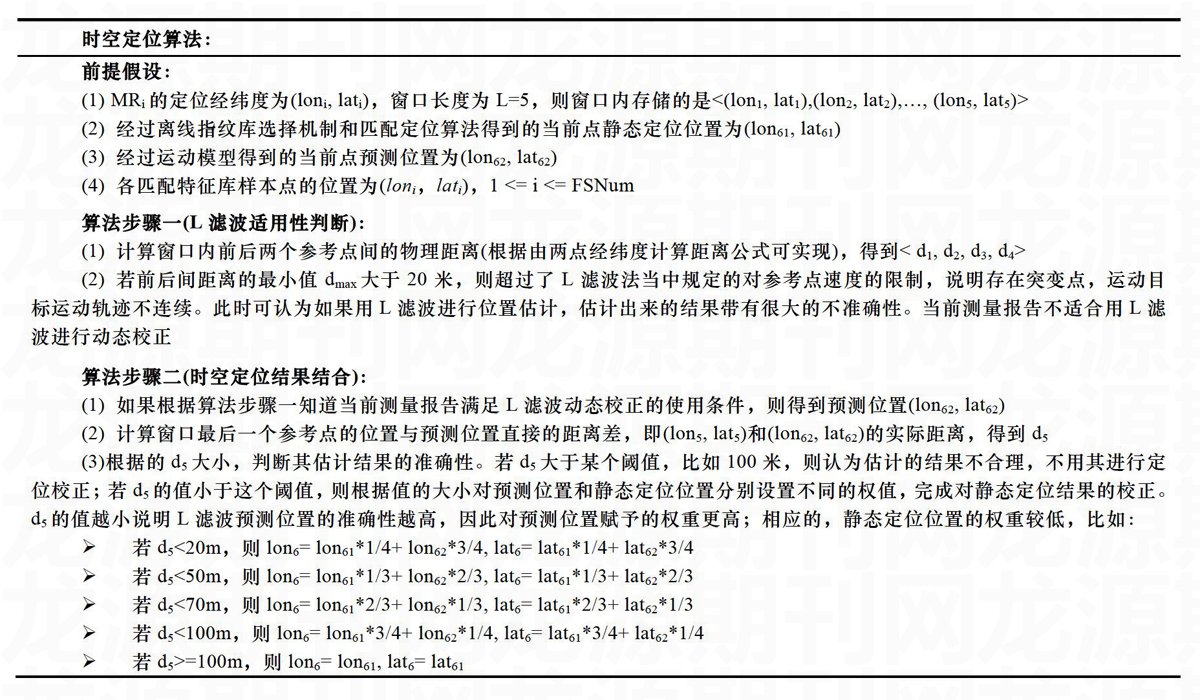
将L法滤波引入定位系统,由于考虑实时定位的需要,对当前测量报告的滤波平滑修正无法考虑当前测量报告之前的所有测量报告。为了保证定位时间又希望能获得较好的定位修正效果,我们取一定窗口长度L(e.g.L=5)内的已定位测量报告点对当前待定位测量报告进行定位修正。为了方便L滤波原理的描述,我们将窗口长度选为5。对当前t时刻点用L滤波进行位置平滑的示意图。持模型尽可能的简单以及可理解,我们设计出以下的算法规则来结合上述两种定位方法的定位结果:
定位结果校正算法中的步骤3)能有效地避免错误累积。假如窗口内参考点的误差都很大,若L滤波估计准确,则估计出来的预测值与窗口内参考点的距离相近,其定位误差也会很大。如此一来,对下一个待预测参考点的位置估计也会与测量报告真实距离较远。步骤3)运用将估计结果与静态定位结果做加权求和,通过不同权重的控制,既保证了L滤波对结果的校正程度也控制了定位误差的累积程度,有效的将时空定位方法结合。
4 实验与结论
为了比较空间定位方法和时空定位方法的性能,我们在城市中做了真实情况下的GSM网络系统实验。在训练阶段之前,通过反向三维射线跟踪模型来生成指纹。
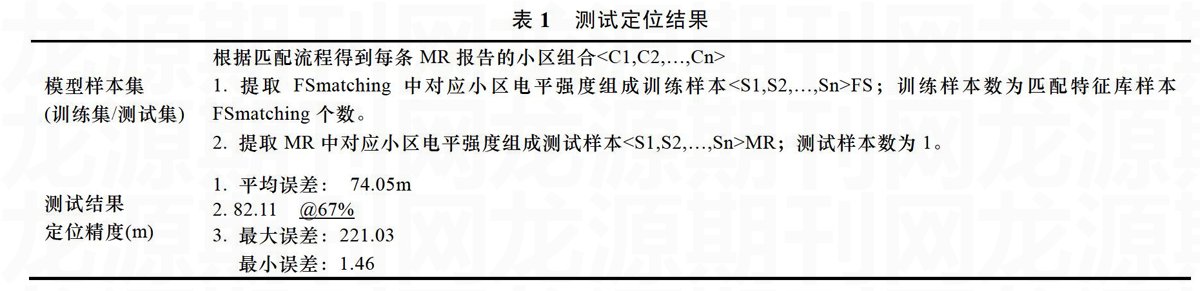
实验区域是一块1平方公里的城市区域。为了生成指纹,将实验区域划分为20m*20m的栅格。在每条指纹中记录20个具有最强RSS的蜂窝网无线信号。基站会每80毫秒记录一次包含RSS和蜂窝网识别信息的测量报告。我们选择8个呼叫id下的500份测量报告作为样本。如表一所示,时空定位方法的结果能够提高传统空间定位方法的准确性。
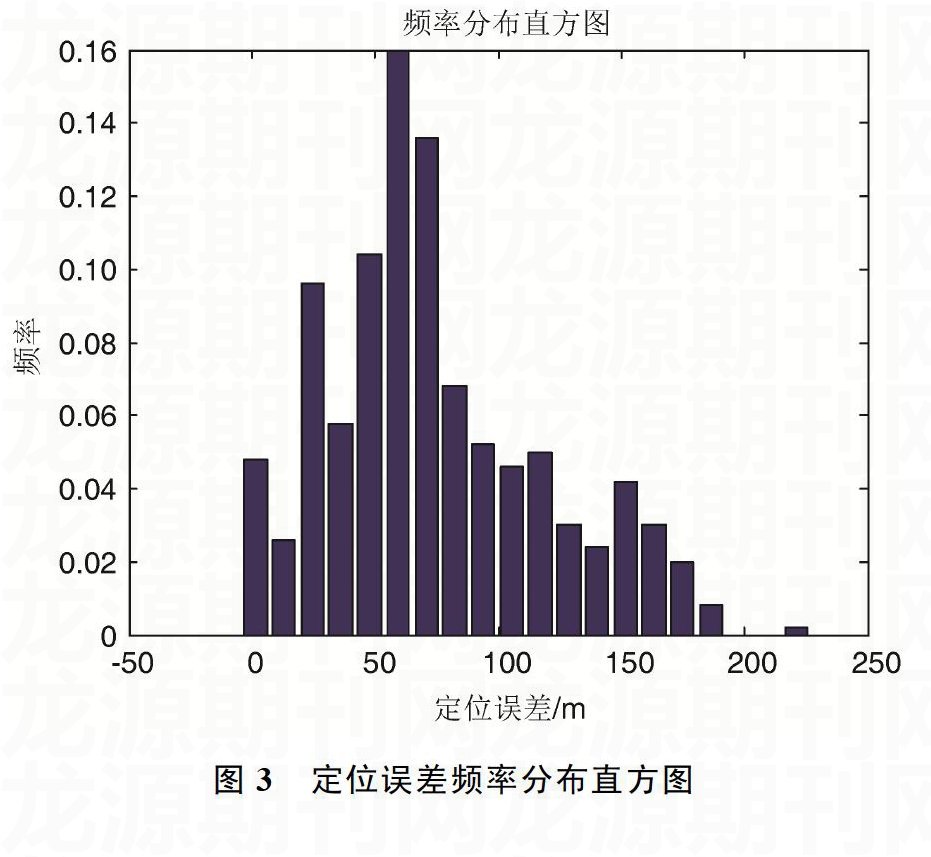
定位误差频率分布直方图如图3所示。
从图表可以看出利用时空定位方法对500条MR即8个callid的定位测试结果的平均精度由只用单一的空间定位方法时的76.00m下降到现在的74.05m,最大误差由之前的377.93m下降到现在的221.03m,实验结果有效的说明了时空定位方法能提高单一空间定位方法的定位精度。
5 总结
本文提出了一个名为时空定位的新定位方法。该方法利用空间定位和时间定位的优势,同时选择KNN算法作为空间定位方法的代表以及L滤波作为时间定位的方法。基于选择的测试指纹可以看出,新的定位方法在实验中比空间定位方法具有更好的定位效果。
- 从抗洪救灾报道看新闻摄影的全媒体创新
- 创新党报评论的三个着力点
- 加强军事新媒体传播改革的几点思考
- 法理与本质:对“舆论”监督的辨析
- 彰明学术 发扬国学
- 为了民众,服务于民众
- 媒介融合环境下党报新媒体发展路径
- “互联网+”背景下传统媒体的转型发展
- 媒介融合时代记者能力重塑的实践与思考
- 互联网时代传统媒体舆论引导力的提升
- 重塑新媒体时代传统媒体的舆论引导力
- 二维码在纸媒运用中的问题与对策
- 电视节目与微博的融合传播研究
- 传统纸媒新闻客户端的发展模式、问题和对策
- 电视科教频道建设运营之浅见
- 移动互联网传播中的品牌情感传播价值及实现策略
- 浅析新闻职业道德实现的“自律”与“他律”
- 如何做好军事新闻的采访与写作
- 突发事件现场报道出镜记者的报道技巧
- 融合与创新:探寻中国电视新闻的渐变趋势
- 主持人即兴口语表达类型浅析
- 户外竞技类节目的创新
- 省级卫视国际新闻创新策略研究
- 雕章琢句写细节
- 新闻与历史的互动
- concavely
- concaveness
- concavenesses
- concaver
- concaves
- concaving
- concavity's
- conceal
- concealabilities
- concealability
- concealable
- concealed
- concealedly
- concealedness
- concealednesses
- concealing
- concealingly
- concealment
- concealments
- conceals
- conceal yourself
- concede
- conceded
- conceder
- conceders
- 超常搭配
- 超常教育
- 超常消费
- 超常的才能
- 超常的智慧
- 超常的聪明
- 超常的谋略
- 超平彩电
- 超度
- 超度众生
- 超异
- 超形
- 超忽
- 超怀
- 超悟
- 超悟尘凡
- 超我
- 超手游廊
- 超拔
- 超拜
- 超损
- 超换
- 超捷
- 超授
- 超摅