彭美定 邓鹏
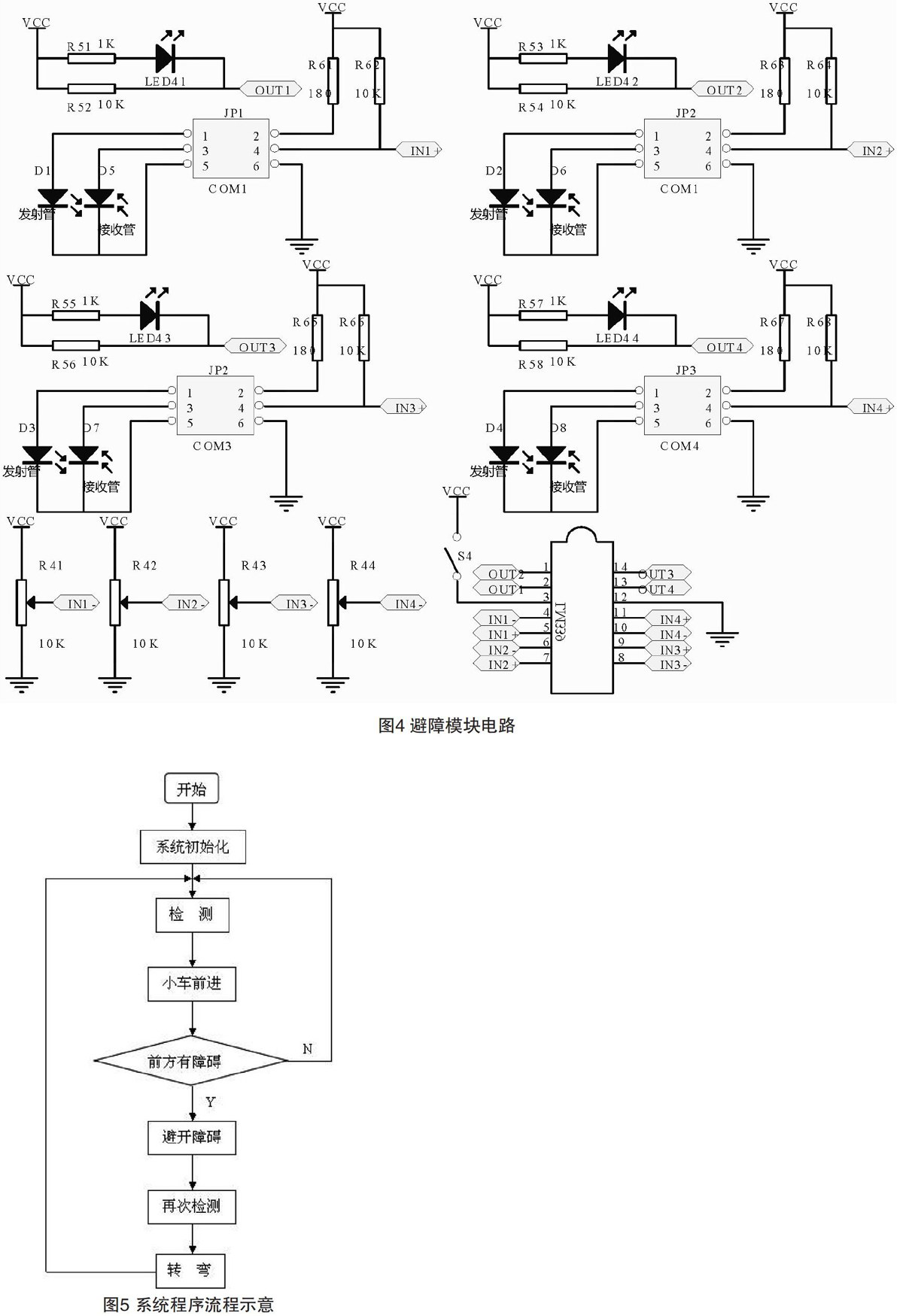
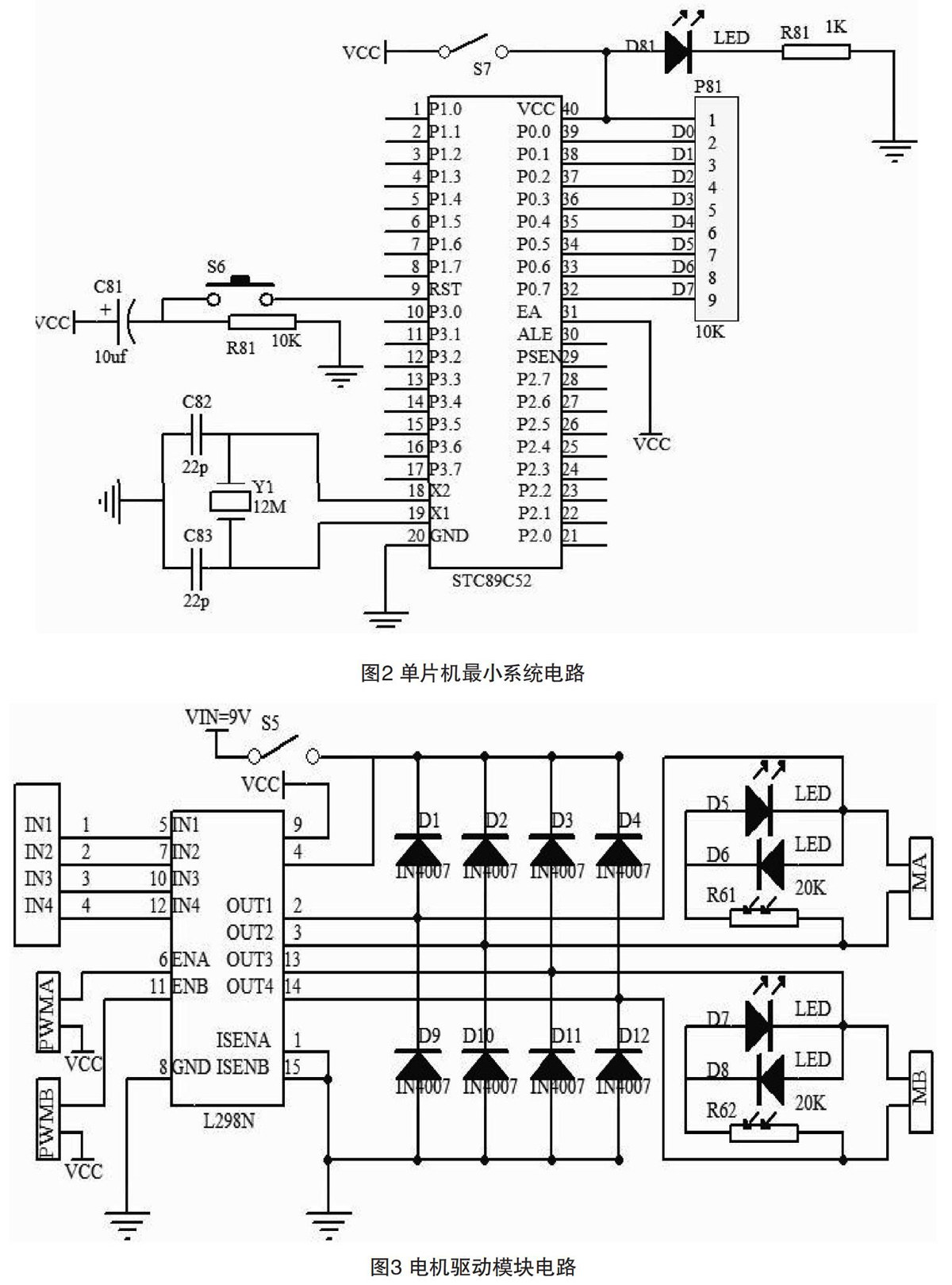
摘要:智能红外避障小车利用红外传感器对障碍物和行驶的路况进行判断,从而使小车能顺利地绕过障碍物。文章提出了一种基于STC89C52单片机的智能红外避障小车的设计与实现方法。该设计以两个直流电动机为主动力源进行驱动。电机驱动电路采用TL298N驱动芯片,通过红外传感器来采集信息,并送入主控单片机(STC89C52)进行处理,数据处理完成后执行相应动作,以达到自动控制的目的。本设计中避障模块采用红外线收发来完成,由控制单元处理数据后执行相应动作,实现了无人干预也可完成一系列动作的功能。 关键词:避障;单片机;红外传感器;脉冲宽度调制 随着科学技术的进步和人们生活水平的提高,人们对生活中的许多事物都提出了更高的要求,同时汽车工业的快速发展,使得智能汽车研究也越来越受人们的关注。智能汽车概念的提出给汽车产业带来了新的挑战,汽车的智能化必将是未来汽车产业发展的趋势。由于传感器的应用与发展,使小车自动避开障碍物成为一种可能,这无异于给小车增添了一双眼睛;自动避障小车可以作为地域探索机器人和紧急抢险机器人的运动系统,通过这双眼睛,它可以巧妙地避开障碍物,再加上其他的一些功能,就可以完成人们指定的任务。本设计以基于红外的智能小车为研究对象,当小车遇到障碍物时,如果离障碍物的距离小于所设定值时,小车采取相应的避障措施。通过红外避障模块和单片机的程序进行校准优化可以消除外部物理条件造成的误差从而达到对障碍物较准确定位的目的。 1.总体方案设计 本系统大体可以分为以下几个部分:微控制器模块、显示模块、电机驱动模块、避障模块、电源模块、直流电机模块等。本系统的方框图如图1所示,采用STC89C52作为微控制器来接收输入信息并对输入信息进行处理,然后将结果输出到电机驱动模块控制直流电机运行,采用通用型1602液晶屏作为显示器,显示小车的各种运行状态和参数,并通过接收控制器产生的信号来驱动电机的运行,从而控制小车的方向和速度。发射管发射出波长为940nm的红外线,当检测到前方有障碍(反射面)时,红外线反射回来被接收管接收,经过比较电路处理后,将该输出信号送到微控制器。本系统采取12v电源为电机驱动模块提供较大的电流,以保证直流电机正常运行。 2.主要单元模块设计 2.1单片机主控制电路设计 本模块主要用于信号的采集并对数据进行分析处理,同时输出高低电平来控制电机速度,从而控制小车前进转弯等动作,此处采用STC89C52单片机作为主控芯片。单片机最小系统电路如图2所示。 2.2电机驱动模块设计 该模块采用了L298N双H桥直流电机驱动芯片,L298N可采用标准TTL逻辑电平信号,VCC可接4.5~7V电压。4脚VS接电源电压,VS电压范围2.5~46v,输出电流可达到2.5A,可驱动电感负载。本系统驱动电机部分vIN采用12v直流电源供电,小车运行时通过单片机向该模块INl,IN2,IN3,IN4脚输入控制信息来控制小车电机的正反转,通过单片机向该模块ENA,ENB脚输入脉冲宽度调制(Pulse WidthModulation,PWM)信息,从而控制小车电机的速度。电机驱动模块电路如图3所示。
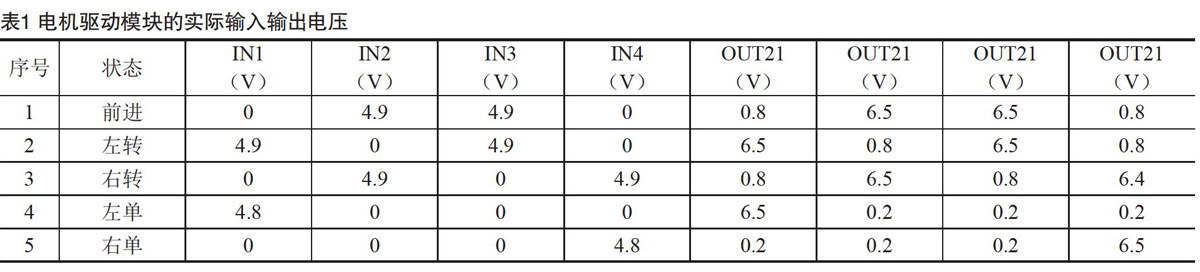
2.3红外避障模块设计 本设计利用红外发射接收管及其处理模块进行避障。红外发射接收管广泛用于各种家用电器的遥控接收器中,如音响、彩色电视机、空调器、VCD视盘机、DVD视盘机以及录像机等。红外接收管能很好地接收红外发射管发射的波长为940nm的红外光信号,而对其他波长的光线则不能接收,从而保证了接收的准确性和灵敏度。当发射出的红外线没有被反射回来或被反射回来但强度不够大时,红外接收管一直处于关断状态,此时模块的TTL输出端为高电平,相应的指示发光二极管一直为熄灭状态;当被测物体出现在检测范围内时,红外线被反射回来,且强度足够大,红外接收管导通,此时模块的TTL输出端为低电平,相应的指示发光二极管被点亮。单片机接收到信号后进行判断执行相应动作避开障碍物。避障模块电路如图4所示。 3.软件系统设计 利用红外传感器检测道路前方的障碍物,单片机通过检测各传感器的工作状态,并将采集到的数据进行综合分析处理后,产生高低电平控制电机驱动模块工作,实现对小車方向和速度的控制,从而实现电动小车自动避障的功能。系统程序流程如图5所示。
线没有被反射回来或被反射回来但强度不够大时,红外接收管一直处于关断状态,经过比较电路处理后,将该输出信号送到微控制器,然后由微控制器产生高低电平控制电机驱动模块工作,实现对小车的方向和速度的控制,从而实现电动小车自动避障的功能。 4.主要设计参数
电机驱动模块采用了L298NT2H桥直流电机驱动芯片,L298N可采用标准TTL逻辑电平信号,VSs可接4.5~7v电压。4脚Vs接电源电压,VS电压范围2.5~46V,输出电流可达到2.5A,可驱动电感负载。本系统驱动电机部分VIN采用12v直流电源供电,小车运行时通过单片机向该模块INl,IN2,IN3,IN4脚输入控制信息来控制小车电机的正反转,通过单片机向该模块ENA,ENB脚输入脉冲宽度调制信息从而控制小车电机的速度。电机驱动模块的实际输入输出电压参数如表1所示。 5.结语 本设计以STC89C52单片机为控制核心,利用红外传感器检测道路前方的障碍物,单片机通过检测各传感器的工作状态,并将采集到的数据进行综合分析处理后,产生高低电平控制电机驱动模块,实现对小车的方向和速度的控制,从而实现电动小车自动避障的功能。
- 新《政府会计制度》下高校财务工作人员素养能力探讨
- 浅析企业财务管理存在的问题及对策
- 大数据背景下的零售银行转型
- 提升股份制商业银行内部控制有效性的探讨
- 关于我国保险公司财务共享中心管理模式的应用研究
- 浅谈并购基金的账务处理
- 医院适应DRG医保支付方式下的绩效考核模式探索
- 我国小额信贷发展初期研究
- 银行业经营发展与风险防控研究
- CVaR在金融风险度量中的应用研究
- 基于MV模型以及CAPM模型的股票组合风险管理
- 我国广泛开征房产税条件的可行性研究
- 工商管理对提高企业管理水平的作用探讨
- 企业内部控制信息披露问题探析
- 浅析制度完善与执行力提高对建筑企业降本增效的重要作用
- 新医改时代公立医院如何探索精细化成本管理体系
- 电力企业内部控制优化研究
- 浅析体检工作的社会效益与经济效益
- 论《劳动合同法》对人力资源管理影响的见解
- 西安国际化社区建设的对策与路径探析
- 论北京八大胡同的保护与开发
- 烟台市蓬莱区发展低碳经济和循环经济的启发
- 辽宁省冰雪旅游游客满意度研究
- 基于因子分析的湖南省农产品出口竞争力实证研究
- 中国碳金融市场发展综述与研究展望
- emphasising
- emphasis/stress
- emphasize
- emphasized
- emphasizer
- ict
- icy
- i.d
- id
- i'd
- i dare say
- i'd be surprised if
- i'd better make tracks
- id'd
- idd
- idea
- ideal
- ideal1
- idealess
- idealise
- idealised
- idealises
- idealising
- idealism
- idealisms
- 轻视老人
- 轻视自己
- 轻视讥笑
- 轻视财利而看重道义
- 轻视财货、商品
- 轻视贤才,依附权贵
- 轻视鄙薄
- 轻视钱财,廉洁清高
- 轻视,疏忽
- 轻视,看不起
- 轻视,简慢
- 轻视,轻慢
- 轻视,鄙弃
- 轻解
- 轻言
- 轻言则人厌,故谨言为自修之要
- 轻言寡信
- 轻言细语
- 轻言肆口
- 轻言自语
- 轻言软语
- 轻言轻语
- 轻訬
- 轻诋
- 轻诡